Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- ET4117 Electrical Machines and Drives Lecture5Documento31 páginasET4117 Electrical Machines and Drives Lecture5farhan beighAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Author AgreeDocumento2 páginasAuthor Agreefarhan beighAinda não há avaliações
- Koi Sap 2009Documento6 páginasKoi Sap 2009farhan beighAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
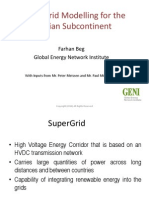
- Supergridmodelling Farhan BegDocumento26 páginasSupergridmodelling Farhan Begfarhan beighAinda não há avaliações
- Critical NodesDocumento6 páginasCritical Nodesfarhan beighAinda não há avaliações
- Application Elektro 2012 enDocumento1 páginaApplication Elektro 2012 enfarhan beighAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Stability and Stable Production Limit of An Oil WellDocumento15 páginasStability and Stable Production Limit of An Oil WellNwakile ChukwuebukaAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- BearingDocumento4 páginasBearingJITENDRA BISWALAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Latex ProjectDocumento3 páginasLatex ProjectPrincess MiroAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Dke672 ch2Documento44 páginasDke672 ch2Siraj MohammedAinda não há avaliações
- AnswerDocumento51 páginasAnswersamAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- BS 131-7-1998Documento21 páginasBS 131-7-1998Germán VSAinda não há avaliações
- Shunt ResistorDocumento7 páginasShunt ResistorAsghar AliAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Eddy AxialDocumento20 páginasEddy Axialandrea19711971Ainda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- PDS Example Collection 24-01-11 - Open PDFDocumento52 páginasPDS Example Collection 24-01-11 - Open PDFMichael GarrisonAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Datasheet ECM 5158 Interface 4pgv1 A80401 PressDocumento4 páginasDatasheet ECM 5158 Interface 4pgv1 A80401 Presslgreilly4Ainda não há avaliações
- Revised Draft Ammendment To IRS T29 MAR13Documento11 páginasRevised Draft Ammendment To IRS T29 MAR13Shipra MishraAinda não há avaliações
- Actor-Network Theory and After - Jonh Law and John HassardDocumento14 páginasActor-Network Theory and After - Jonh Law and John HassardGabriel RomanAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Arm SubassemblyDocumento4 páginasArm Subassemblyapi-541897663Ainda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Angle Chase As PDFDocumento7 páginasAngle Chase As PDFNM HCDEAinda não há avaliações
- Transition Elements Final 1Documento44 páginasTransition Elements Final 1Venkatesh MishraAinda não há avaliações
- Excel VBA To Interact With Other ApplicationsDocumento7 páginasExcel VBA To Interact With Other ApplicationsgirirajAinda não há avaliações
- Struktur Baja 1Documento33 páginasStruktur Baja 1Agung S NurcahyanaAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Open-Air Theatre in The Centre of The City: Acoustic Design and Noise Environment ControlDocumento3 páginasOpen-Air Theatre in The Centre of The City: Acoustic Design and Noise Environment ControlArchitectural Visualizations ArchitecturelandsAinda não há avaliações
- SPE 124116 A Comprehensive Methodology To Avoid and Remediate Drilling Problems by Real Time PWD Data InterpretationDocumento8 páginasSPE 124116 A Comprehensive Methodology To Avoid and Remediate Drilling Problems by Real Time PWD Data InterpretationLeticia Bueno NogueiraAinda não há avaliações
- Types of Capacitors ExplainedDocumento16 páginasTypes of Capacitors Explainedarnoldo3551Ainda não há avaliações
- Trane ComercialDocumento152 páginasTrane ComercialMartin Bourgon100% (2)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- ACUCOBOL-GT Users Guide v8 Tcm21-18390Documento587 páginasACUCOBOL-GT Users Guide v8 Tcm21-18390Miquel CerezuelaAinda não há avaliações
- Embedded Linux Course SlidesDocumento571 páginasEmbedded Linux Course SlidesKuan Xing Li100% (2)
- SLES Concentration Effect On The Rheolog TraducidoDocumento22 páginasSLES Concentration Effect On The Rheolog TraducidoJose GamezAinda não há avaliações
- Velocity Analysis-Instantaneous Center MDocumento7 páginasVelocity Analysis-Instantaneous Center MSuman_SamadderAinda não há avaliações
- Exploit Writing Tutorial Part 1 - Stack Based Overflows - Corelan TeamDocumento54 páginasExploit Writing Tutorial Part 1 - Stack Based Overflows - Corelan Teamdamir_krstanovicAinda não há avaliações
- Petroleum Formation Evaluation Questions AnswersDocumento2 páginasPetroleum Formation Evaluation Questions AnswersdeusdedithaugustokiaAinda não há avaliações
- Paragon Error Code InformationDocumento19 páginasParagon Error Code InformationnenulelelemaAinda não há avaliações
- Smart Four Channel Highside Power Switch: BTS711L1Documento17 páginasSmart Four Channel Highside Power Switch: BTS711L1Giapy Phuc TranAinda não há avaliações
- Os Module1Documento37 páginasOs Module1lingaraj_superstarAinda não há avaliações