Você também pode gostar
- Fuzzy Topological Lattice Implication AlgebrasDocumento5 páginasFuzzy Topological Lattice Implication AlgebrasSaravananAinda não há avaliações
- Jan Van Tiel - Convex Analysis - An Introductory Text-Wiley (1984) PDFDocumento135 páginasJan Van Tiel - Convex Analysis - An Introductory Text-Wiley (1984) PDFthassio luan alves rodriguesAinda não há avaliações
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)Ainda não há avaliações
- MTH 210 Fall 2009 Review For Final Exam: ProblemsDocumento10 páginasMTH 210 Fall 2009 Review For Final Exam: Problemsschreckk118Ainda não há avaliações
- WebChallengeProblems 3C3 PDFDocumento17 páginasWebChallengeProblems 3C3 PDFRevanKumarBattuAinda não há avaliações
- Mejlbro L.-Calculus 2c-8, Examples of Surface Integrals (2007) PDFDocumento84 páginasMejlbro L.-Calculus 2c-8, Examples of Surface Integrals (2007) PDFAirton321Ainda não há avaliações
- Problems Recognizing Linear ExponentialDocumento4 páginasProblems Recognizing Linear Exponentialapi-644124582Ainda não há avaliações
- Prob 2Documento6 páginasProb 2raghavAinda não há avaliações
- Fundamental Group 1Documento42 páginasFundamental Group 1tamilAinda não há avaliações
- Topology and GroupsDocumento74 páginasTopology and GroupsPhilip PattersonAinda não há avaliações
- A03 Sol PDFDocumento5 páginasA03 Sol PDFKhwanjira Khompargping 187Ainda não há avaliações
- Big List of Problems TopologyDocumento71 páginasBig List of Problems Topologysanti10sepAinda não há avaliações
- Fa NotesDocumento80 páginasFa NotesJeoff Libo-onAinda não há avaliações
- Laue & Bravis Crystal LatticeDocumento18 páginasLaue & Bravis Crystal LatticeRSLAinda não há avaliações
- Covering Spaces and Graph Theory PDFDocumento46 páginasCovering Spaces and Graph Theory PDFStefanny Arboleda CAinda não há avaliações
- Charla 1 TC 1Documento9 páginasCharla 1 TC 1Nathan LuxAinda não há avaliações
- Linear Algebra NotesDocumento49 páginasLinear Algebra NotesTsubasa ZAinda não há avaliações
- Differential Calculus and Its ApplicationsNo EverandDifferential Calculus and Its ApplicationsNota: 2.5 de 5 estrelas2.5/5 (6)
- Cambridge Part 2567Documento30 páginasCambridge Part 2567Chandan GuptaAinda não há avaliações
- Tutorial 2Documento3 páginasTutorial 2Sahil YardiAinda não há avaliações
- Related: Multiwavelets TO The Cantor Dyadic GroupDocumento8 páginasRelated: Multiwavelets TO The Cantor Dyadic GroupukoszapavlinjeAinda não há avaliações
- Related: Multiwavelets TO The Cantor Dyadic GroupDocumento8 páginasRelated: Multiwavelets TO The Cantor Dyadic GroupukoszapavlinjeAinda não há avaliações
- Chapter4 ManifoldsDocumento39 páginasChapter4 ManifoldsMarvin OlavidesAinda não há avaliações
- Part A (Answer Only)Documento3 páginasPart A (Answer Only)kartiktalawrAinda não há avaliações
- SeparableDocumento9 páginasSeparableshwetaAinda não há avaliações
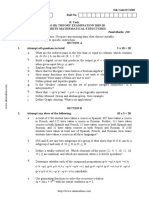
- Btech Cs 3 Sem Discrete Mathematical Structures Ecs303 2020Documento2 páginasBtech Cs 3 Sem Discrete Mathematical Structures Ecs303 2020Vishal Kumar Sharma100% (1)
- Lecture Notes PDFDocumento49 páginasLecture Notes PDFLyndon FanAinda não há avaliações
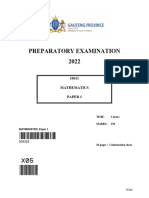
- Mathematics Maths NSC P1 QP Sep 2022 Eng GautengDocumento12 páginasMathematics Maths NSC P1 QP Sep 2022 Eng Gautengsphephile78Ainda não há avaliações
- Matrices All of Whose Principal Submatrices of Som 1995 Linear Algebra and IDocumento85 páginasMatrices All of Whose Principal Submatrices of Som 1995 Linear Algebra and IvahidAinda não há avaliações
- EssayDocumento22 páginasEssayKyle ByrneAinda não há avaliações
- Graph AlgorithmsDocumento82 páginasGraph AlgorithmsDharmendra KumarAinda não há avaliações
- PropertiesoftheCaputo FabrizioFractionalDerivativeDocumento10 páginasPropertiesoftheCaputo FabrizioFractionalDerivativetalhaarshad178Ainda não há avaliações
- Vector Spaces: Theory and PracticeDocumento23 páginasVector Spaces: Theory and PracticeSoumyajit BagchiAinda não há avaliações
- Test Bank For Calculus Single and Multivariable 6Th Edition by Hughes Hallett Gleason and Mccallum Isbn 047088861X 978047088861 Full Chapter PDFDocumento36 páginasTest Bank For Calculus Single and Multivariable 6Th Edition by Hughes Hallett Gleason and Mccallum Isbn 047088861X 978047088861 Full Chapter PDFjesus.jackson388100% (9)
- Barth VKI95Documento141 páginasBarth VKI95Jose UlloaAinda não há avaliações
- 307 Ode Notes 2020 2021Documento148 páginas307 Ode Notes 2020 2021Sam BolduanAinda não há avaliações
- 321 ch1Documento60 páginas321 ch1Tom DavisAinda não há avaliações
- Lectures On Condensed MathematicsDocumento77 páginasLectures On Condensed MathematicsSong LiAinda não há avaliações
- LA Assignment 3 PDFDocumento4 páginasLA Assignment 3 PDFvinayAinda não há avaliações
- MATH1179 Graph Theory Book SolutionDocumento4 páginasMATH1179 Graph Theory Book SolutionOviyanAinda não há avaliações
- Test 2 Bwa 21303 Sem 21819Documento2 páginasTest 2 Bwa 21303 Sem 21819Ezanie IzyanAinda não há avaliações
- Based On Notes of Rodica D. CostinDocumento32 páginasBased On Notes of Rodica D. CostinSimi ChoudhuryAinda não há avaliações
- A Flat Projective Variety With D - Holonomy: Francis E. A. JohnsonDocumento9 páginasA Flat Projective Variety With D - Holonomy: Francis E. A. JohnsonAle TolcachierAinda não há avaliações
- Dancing LinksDocumento26 páginasDancing LinksVegwynAinda não há avaliações
- 2017 Linear Algebra 2Documento114 páginas2017 Linear Algebra 2Corn eliusAinda não há avaliações
- Lectures On Discrete GeometryDocumento80 páginasLectures On Discrete GeometryTanuj04Ainda não há avaliações
- Homework & Tutorial 1: Turn in Solutions For at Least 10 ProblemsDocumento3 páginasHomework & Tutorial 1: Turn in Solutions For at Least 10 ProblemsSegun MacphersonAinda não há avaliações
- MAT560 Group Project Instruction (Oct 2023-Feb 2024)Documento8 páginasMAT560 Group Project Instruction (Oct 2023-Feb 2024)2021826386Ainda não há avaliações
- FunctionalAnalysisMathematica PDFDocumento94 páginasFunctionalAnalysisMathematica PDFAlfredo MartínezAinda não há avaliações
- Additional Exercises For Convex Optimization PDFDocumento187 páginasAdditional Exercises For Convex Optimization PDFCliffordTorresAinda não há avaliações
- ST208 Chapter 1Documento15 páginasST208 Chapter 1Nikhil KanabarAinda não há avaliações
- Separable ProgrammingDocumento5 páginasSeparable ProgrammingMyra MrAinda não há avaliações
- Chapter 4Documento11 páginasChapter 4Omed. HAinda não há avaliações
- (Evans L., Thompson R.) Introduction To AlgebraicDocumento248 páginas(Evans L., Thompson R.) Introduction To AlgebraicJean CarlosAinda não há avaliações
- TopologyDocumento74 páginasTopologyVishyataAinda não há avaliações
- Codeing of GWMDocumento17 páginasCodeing of GWMAshish KatochAinda não há avaliações
- 2022 Grade 12 Math Trial Exam Paper 1 GPDocumento11 páginas2022 Grade 12 Math Trial Exam Paper 1 GPcharlenemoyAinda não há avaliações
- Architecture of The World Wide Web, Volume One: W3C Recommendation 15 December 2004Documento53 páginasArchitecture of The World Wide Web, Volume One: W3C Recommendation 15 December 2004Que ImportaAinda não há avaliações
- Poster SurfDocumento1 páginaPoster SurfQue ImportaAinda não há avaliações
- Brian Cvpr07Documento1 páginaBrian Cvpr07Que ImportaAinda não há avaliações
- Ti Z Ti Z PGF PGF: Manual For Version 2.00 Manual For Version 2.00Documento1 páginaTi Z Ti Z PGF PGF: Manual For Version 2.00 Manual For Version 2.00Que ImportaAinda não há avaliações
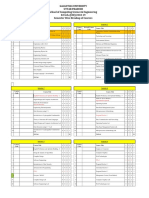
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocumento2 páginasGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiAinda não há avaliações
- Five Reasons Hazards Are Downplayed or Not ReportedDocumento19 páginasFive Reasons Hazards Are Downplayed or Not ReportedMichael Kovach100% (1)
- Hare and Hyena: Mutugi KamundiDocumento18 páginasHare and Hyena: Mutugi KamundiAndresileAinda não há avaliações
- Mathmatcs Joint Form TwoDocumento11 páginasMathmatcs Joint Form TwoNurudi jumaAinda não há avaliações
- Safety Bulletin 09 - Emergency Escape Breathing Device - Product RecallDocumento2 páginasSafety Bulletin 09 - Emergency Escape Breathing Device - Product RecallMuhammadAinda não há avaliações
- Imabalacat DocuDocumento114 páginasImabalacat DocuJänrëýMåmårìlSälängsàngAinda não há avaliações
- RCA LCD26V6SY Service Manual 1.0 PDFDocumento33 páginasRCA LCD26V6SY Service Manual 1.0 PDFPocho Pochito100% (1)
- Niveshdaily: From Research DeskDocumento53 páginasNiveshdaily: From Research DeskADAinda não há avaliações
- 4.2.4.5 Packet Tracer - Connecting A Wired and Wireless LAN InstructionsDocumento5 páginas4.2.4.5 Packet Tracer - Connecting A Wired and Wireless LAN InstructionsAhmadHijaziAinda não há avaliações
- Yetta Company ProfileDocumento6 páginasYetta Company ProfileAfizi GhazaliAinda não há avaliações
- Li JinglinDocumento3 páginasLi JinglincorneliuskooAinda não há avaliações
- Pioneer 1019ah-K Repair ManualDocumento162 páginasPioneer 1019ah-K Repair ManualjekAinda não há avaliações
- UNIT 5-8 PrintingDocumento17 páginasUNIT 5-8 PrintingNOODAinda não há avaliações
- DirectionDocumento1 páginaDirectionJessica BacaniAinda não há avaliações
- SG110CX: Multi-MPPT String Inverter For SystemDocumento2 páginasSG110CX: Multi-MPPT String Inverter For SystemKatherine SmithAinda não há avaliações
- Quality Control of Rigid Pavements 1Documento58 páginasQuality Control of Rigid Pavements 1pranjpatil100% (1)
- Chapter 13 CarbohydratesDocumento15 páginasChapter 13 CarbohydratesShanna Sophia PelicanoAinda não há avaliações
- Dating Apps MDocumento2 páginasDating Apps Mtuanhmt040604Ainda não há avaliações
- Very Narrow Aisle MTC Turret TruckDocumento6 páginasVery Narrow Aisle MTC Turret Truckfirdaushalam96Ainda não há avaliações
- Mushroom Project - Part 1Documento53 páginasMushroom Project - Part 1Seshadev PandaAinda não há avaliações
- AMICO Bar Grating CatalogDocumento57 páginasAMICO Bar Grating CatalogAdnanAinda não há avaliações
- SEILDocumento4 páginasSEILGopal RamalingamAinda não há avaliações
- Caterpillar Cat C7 Marine Engine Parts Catalogue ManualDocumento21 páginasCaterpillar Cat C7 Marine Engine Parts Catalogue ManualkfsmmeAinda não há avaliações
- Philodendron Plants CareDocumento4 páginasPhilodendron Plants CareSabre FortAinda não há avaliações
- I. Learning Objectives / Learning Outcomes: Esson LANDocumento3 páginasI. Learning Objectives / Learning Outcomes: Esson LANWilliams M. Gamarra ArateaAinda não há avaliações
- Mecha World Compendium Playbooks BWDocumento12 páginasMecha World Compendium Playbooks BWRobson Alves MacielAinda não há avaliações
- Test Bank For Psychology 6th Edition Don HockenburyDocumento18 páginasTest Bank For Psychology 6th Edition Don HockenburyKaitlynMorganarwp100% (42)
- Mfin 7002 Investment Analysis and Portfolio ManagementDocumento5 páginasMfin 7002 Investment Analysis and Portfolio ManagementjessieAinda não há avaliações
- FMEA Minus The PainDocumento7 páginasFMEA Minus The PainMUNISAinda não há avaliações
- Jacob Stewart ResumeDocumento2 páginasJacob Stewart Resumeapi-250063152Ainda não há avaliações