Você também pode gostar
- Kinematics of Machinery PDFDocumento40 páginasKinematics of Machinery PDFkalirajgurusamy92% (26)
- Kinematics of Machinery Lecturer Notes All 5 UnitsDocumento45 páginasKinematics of Machinery Lecturer Notes All 5 Unitskumaravel07Ainda não há avaliações
- Mechanics of MachineDocumento31 páginasMechanics of MachineRanjit Rajendran100% (1)
- Kom Unit 2Documento24 páginasKom Unit 2Muthuvel M100% (3)
- Design of Machinery: Chapter 1 Introduction SummaryDocumento9 páginasDesign of Machinery: Chapter 1 Introduction SummaryJulianSamayoa100% (2)
- CH 32-Mechanical AssemblyDocumento65 páginasCH 32-Mechanical AssemblyNasir MaqsoodAinda não há avaliações
- KOM Unit 1Documento100 páginasKOM Unit 1VPSureshKumar100% (23)
- Kinematic Diagrams & Degrees of FreedomDocumento17 páginasKinematic Diagrams & Degrees of Freedomrezkyrivaldo94Ainda não há avaliações
- Design of GearsDocumento64 páginasDesign of GearsFauiqe Yousaf100% (1)
- 44-Slider Crank Mechanism Using HacksawDocumento15 páginas44-Slider Crank Mechanism Using HacksawsathishAinda não há avaliações
- Manufacturing Technology II SyllabusDocumento1 páginaManufacturing Technology II Syllabussmg26thmay100% (1)
- Limits and FitsDocumento6 páginasLimits and Fitscamohunter71Ainda não há avaliações
- Analysis and Synthesis of MechanismsDocumento402 páginasAnalysis and Synthesis of Mechanismsdharamuu100% (5)
- UNIT 3 Projection of SolidsDocumento15 páginasUNIT 3 Projection of SolidsmanojAinda não há avaliações
- 9A14402 Theory of MachinesDocumento8 páginas9A14402 Theory of MachinessivabharathamurthyAinda não há avaliações
- Mechanics of Machines ME2031: Lab Instructor: Awais LiaqatDocumento12 páginasMechanics of Machines ME2031: Lab Instructor: Awais LiaqatAnonymous B0cm7LZhAinda não há avaliações
- KOM Question BankDocumento10 páginasKOM Question Banknsubbu_mitAinda não há avaliações
- UNIT-III Geometric ModelingDocumento89 páginasUNIT-III Geometric ModelingSuhasAinda não há avaliações
- Design of Machine ElementsDocumento508 páginasDesign of Machine ElementsPrashanth Kumar93% (15)
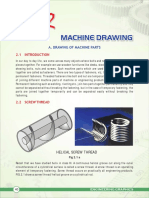
- Chapter-2 Engineering Graphics PDFDocumento47 páginasChapter-2 Engineering Graphics PDFVidya Narayan100% (2)
- Inversions of Double Slider Crank ChainDocumento23 páginasInversions of Double Slider Crank ChainAnkit JadhavAinda não há avaliações
- Machine Design - Design of ClutchesDocumento12 páginasMachine Design - Design of ClutchesSachin Chaturvedi90% (21)
- Computer Aided Machine Drawing ManualDocumento51 páginasComputer Aided Machine Drawing ManualHareesha N G79% (19)
- Theory of MachinesDocumento41 páginasTheory of MachinesC V CHANDRASHEKARA75% (4)
- Vtu Kinematics of Machines Module - 1 NotesDocumento64 páginasVtu Kinematics of Machines Module - 1 NotesAnonymous SLKWYHBoAinda não há avaliações
- Elements of Mechanism - Peter Schwamb - 1904Documento300 páginasElements of Mechanism - Peter Schwamb - 1904Tiago Carnovali PessoaAinda não há avaliações
- Theory of MachineDocumento21 páginasTheory of MachineVaibhav Vithoba NaikAinda não há avaliações
- Theory of Machines Graphical Linkage Synthesis: Instructor: Weinan Gao, PH.DDocumento24 páginasTheory of Machines Graphical Linkage Synthesis: Instructor: Weinan Gao, PH.DVasda VinciAinda não há avaliações
- 5.2 Flanged Bolt CouplingDocumento11 páginas5.2 Flanged Bolt CouplingShayneBumatay0% (1)
- Design of GearsDocumento110 páginasDesign of GearsSomnath IngaleAinda não há avaliações
- Kom Lecture NotesDocumento134 páginasKom Lecture Noteslakshmigsr6610Ainda não há avaliações
- Strength of MaterialsDocumento29 páginasStrength of Materialsrubyshaji96Ainda não há avaliações
- Lagrangian MechanicsDocumento15 páginasLagrangian Mechanicsrr1819100% (1)
- GATE Theory of Machines BookDocumento12 páginasGATE Theory of Machines BookMims12Ainda não há avaliações
- Hydraulics & PneumaticsDocumento167 páginasHydraulics & PneumaticsAakash Singh100% (9)
- J3010 - Mechanics of Machines 1Documento140 páginasJ3010 - Mechanics of Machines 1BryanMaxwellAinda não há avaliações
- Catia Lab ManualDocumento110 páginasCatia Lab ManualShiva Shankar100% (2)
- Kinematics of MachinesDocumento100 páginasKinematics of MachinesMr.S Upender100% (1)
- Pneumatic Based Punching MachineDocumento45 páginasPneumatic Based Punching Machineraja100% (3)
- Kinematics and Dynamics of Machinery Lab ManualDocumento63 páginasKinematics and Dynamics of Machinery Lab ManualsaranAinda não há avaliações
- Chosen Problems and Their Final Solutions of Chap. 1 (Waldron)Documento7 páginasChosen Problems and Their Final Solutions of Chap. 1 (Waldron)Fuu HouHouAinda não há avaliações
- Design of Hydraulic Platform LiftDocumento31 páginasDesign of Hydraulic Platform LiftzetseatAinda não há avaliações
- Slider Crank Chain ExperimentDocumento10 páginasSlider Crank Chain ExperimentNazim Jamali100% (2)
- On Shaper Machine FinalDocumento6 páginasOn Shaper Machine FinalSuraj Mukti100% (1)
- Faculty of Engineering Technology Department of Mechanical Engineering TechnologyDocumento15 páginasFaculty of Engineering Technology Department of Mechanical Engineering TechnologyNur Syuhada YaacobAinda não há avaliações
- Ratan TataDocumento14 páginasRatan Tatashruti.dhond3251100% (1)
- Gear and Gear TrainDocumento21 páginasGear and Gear Trainm_er100Ainda não há avaliações
- Kinematics of MachinesDocumento227 páginasKinematics of Machinesdpksobs100% (4)
- Kinematics of Machines Notes Tutorials MDocumento46 páginasKinematics of Machines Notes Tutorials Minayat rasoolAinda não há avaliações
- Mech-Iv-Kinematics of Machines (10me44) - Notes PDFDocumento196 páginasMech-Iv-Kinematics of Machines (10me44) - Notes PDFgopalAinda não há avaliações
- Kinematics Lecture NotesDocumento34 páginasKinematics Lecture Notesprasad6048100% (1)
- ME2203 Subject Notes PDFDocumento34 páginasME2203 Subject Notes PDFRakeshkumarceg100% (1)
- Me6401 KomDocumento128 páginasMe6401 KomThomas LafontaineAinda não há avaliações
- Kom Unit-IDocumento52 páginasKom Unit-IJAYAMADHURI CHAinda não há avaliações
- ME8492 NotesDocumento76 páginasME8492 NotesYa Hya SahalAinda não há avaliações
- Kinematics of MachineryDocumento38 páginasKinematics of Machineryajaymechengineer100% (1)
- TOM EME-653 lAB MANUAL1Documento41 páginasTOM EME-653 lAB MANUAL1kotika_somarajuAinda não há avaliações
- ME8492 Kinematics of Machinery 03 - by LearnEngineering - inDocumento76 páginasME8492 Kinematics of Machinery 03 - by LearnEngineering - inPrasanna SekarAinda não há avaliações
- Module 1Documento32 páginasModule 1abhishek bsAinda não há avaliações
- BTM3134 Week 1 IntroductionDocumento19 páginasBTM3134 Week 1 IntroductionAswaja313Ainda não há avaliações
- Indus University Indus Institute of Technology & Engineering, AhmedabadDocumento1 páginaIndus University Indus Institute of Technology & Engineering, Ahmedabadsanket patelAinda não há avaliações
- V CardDocumento1 páginaV Cardsanket patelAinda não há avaliações
- CalendarDocumento6 páginasCalendarsanket patelAinda não há avaliações
- Impeller Tender EW-58 (SPS)Documento54 páginasImpeller Tender EW-58 (SPS)sanket patelAinda não há avaliações
- Syllabus of GTU First SamDocumento14 páginasSyllabus of GTU First SamJay_PanchalAinda não há avaliações
- Properties of Steam: Prof. Sanket PatelDocumento11 páginasProperties of Steam: Prof. Sanket Patelsanket patelAinda não há avaliações
- Mathematical Modeling and Computer SimulationDocumento14 páginasMathematical Modeling and Computer Simulationsanket patelAinda não há avaliações
- Gtu Me in Machine DesignDocumento1 páginaGtu Me in Machine Designsanket patelAinda não há avaliações
- Environment Ecology PDFDocumento10 páginasEnvironment Ecology PDFbhanu_119Ainda não há avaliações
- Man Mor Bani Thanghat Kare PDFDocumento1 páginaMan Mor Bani Thanghat Kare PDFsanket patelAinda não há avaliações
- "Small Is The New Big" in Hindi by "Sandeep Maheshwari"Documento48 páginas"Small Is The New Big" in Hindi by "Sandeep Maheshwari"merijan10Ainda não há avaliações
- Land Reform After IndependenceDocumento13 páginasLand Reform After Independencesanket patelAinda não há avaliações
- Vodafone OriginDocumento54 páginasVodafone OriginRajanikantJadhavAinda não há avaliações
- Handbook of Mechanical Engineering TermsDocumento366 páginasHandbook of Mechanical Engineering Termsjakejohns95% (44)
- Land CeilingDocumento13 páginasLand Ceilingsanket patelAinda não há avaliações
- Consolidation of HoldingDocumento11 páginasConsolidation of Holdingsanket patelAinda não há avaliações
- Theory of Machines and Mechanisms by ShigleyDocumento592 páginasTheory of Machines and Mechanisms by ShigleyUlises Arias Bañuelos56% (9)
- Angular MeasurementDocumento41 páginasAngular Measurementsanket patelAinda não há avaliações
- Temperature MeasurementDocumento25 páginasTemperature Measurementsanket patelAinda não há avaliações
- Tyre Tread PatternsDocumento1 páginaTyre Tread Patternssanket patelAinda não há avaliações
- m7 U1 v2Documento48 páginasm7 U1 v2hks82Ainda não há avaliações
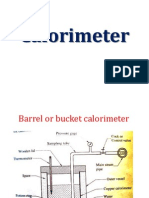
- CalorimeterDocumento6 páginasCalorimetersanket patelAinda não há avaliações
- Ncert Book ListDocumento2 páginasNcert Book Listsanket patelAinda não há avaliações
- Lubricants NotesDocumento3 páginasLubricants Notessanket patelAinda não há avaliações
- Steel Section As Per Is 808Documento3 páginasSteel Section As Per Is 808samihakhanAinda não há avaliações
- LinuxDocumento206 páginasLinuxDinesh BhawnaniAinda não há avaliações
- Statement of AccountDocumento45 páginasStatement of AccountSARAVANAN KESAVANAinda não há avaliações
- (Lab Report Operation Unit) Experiment 3: Separation of An Ordinary Binary Mixture Consisting of Acetic Acid and Water by Using Simple Batch Distillation Technique.Documento8 páginas(Lab Report Operation Unit) Experiment 3: Separation of An Ordinary Binary Mixture Consisting of Acetic Acid and Water by Using Simple Batch Distillation Technique.Fazsroul100% (9)
- Fire ProtectionDocumento44 páginasFire ProtectionAbdul JabbarAinda não há avaliações
- Automatic Room Light Controller With Visitor Counter-1Documento2 páginasAutomatic Room Light Controller With Visitor Counter-1Amitosh MishraAinda não há avaliações
- Motor TestingDocumento26 páginasMotor TestingGas Gas DucatiAinda não há avaliações
- Instruction Manual: Fuel Valve Test Device MODEL: HDFD-1100Documento16 páginasInstruction Manual: Fuel Valve Test Device MODEL: HDFD-1100Vlad KorzhovAinda não há avaliações
- Safety Incident ReportDocumento10 páginasSafety Incident ReportMelanie BrittainAinda não há avaliações
- Changes and Implications On Contractors & Sub-ContractorsDocumento2 páginasChanges and Implications On Contractors & Sub-ContractorsFrd Ohsem Hafr0% (1)
- HART Tech Short FormDocumento9 páginasHART Tech Short FormJediael JuniorAinda não há avaliações
- O&M Manual SPAC-08N-10NDocumento46 páginasO&M Manual SPAC-08N-10Nanwar sadat50% (2)
- MHI NZ Room Sizing Chart 2021Documento1 páginaMHI NZ Room Sizing Chart 2021fsdfsdfsdAinda não há avaliações
- ASTMD2444 FixedImpactDocumento8 páginasASTMD2444 FixedImpactGerardo Lopez GochiAinda não há avaliações
- SR en 10025-04Documento8 páginasSR en 10025-04pukla100% (2)
- Cat Fines Presentation SlidesDocumento48 páginasCat Fines Presentation SlidescaptkcAinda não há avaliações
- Microsoft SQL Server 2005 Express Edition &Documento95 páginasMicrosoft SQL Server 2005 Express Edition &lgmep350Ainda não há avaliações
- Q - Bae146 Inventory - SSS-Jan 2010Documento6 páginasQ - Bae146 Inventory - SSS-Jan 2010sssavAinda não há avaliações
- Atfd Design Calculation: Data Energy Balance Agitator Shell DesignDocumento1 páginaAtfd Design Calculation: Data Energy Balance Agitator Shell DesignManoj BAinda não há avaliações
- Ferroelectric RAM FRAM Seminar Report1Documento20 páginasFerroelectric RAM FRAM Seminar Report1Gaurav ReddyAinda não há avaliações
- DuPont Sontara Wipes Technical SpecsDocumento2 páginasDuPont Sontara Wipes Technical SpecsSkySupplyUSAAinda não há avaliações
- WPH02 01 Que 20160120Documento24 páginasWPH02 01 Que 20160120Omar HashemAinda não há avaliações
- Power SteeringDocumento31 páginasPower SteeringpeskeirasAinda não há avaliações
- Road Geometry & Transition CurveDocumento8 páginasRoad Geometry & Transition CurveNann Kay Thari KyawAinda não há avaliações
- WoodwardDocumento5 páginasWoodwardMuhammad UsmanAinda não há avaliações
- High Precision Ball Berings GMNDocumento72 páginasHigh Precision Ball Berings GMNSilvio Busdraghi AmorosoAinda não há avaliações
- 015-Method Statement For Painting Works (Building) PDFDocumento21 páginas015-Method Statement For Painting Works (Building) PDFKöksal Patan86% (21)
- Desktop Publishing Advertisement RubricDocumento1 páginaDesktop Publishing Advertisement Rubricapi-364316996Ainda não há avaliações
- IntegratingBIMTechnologyintoLA (2014) PDFDocumento115 páginasIntegratingBIMTechnologyintoLA (2014) PDFArnaldo RuizAinda não há avaliações
- Cks 180 Ton MIGAS BaruDocumento46 páginasCks 180 Ton MIGAS BaruHario PramuditoAinda não há avaliações