Você também pode gostar
- Control de Velocidad en Motores de Induccion MonofasicosDocumento39 páginasControl de Velocidad en Motores de Induccion MonofasicosKikeyDany Cordova Romo100% (3)
- MicrometroDocumento2 páginasMicrometroluis tiuquingaAinda não há avaliações
- Madera de ConstruccionDocumento7 páginasMadera de ConstruccionInternet E-conexcionAinda não há avaliações
- Instrumentacion de ProcesosDocumento24 páginasInstrumentacion de ProcesosLuisMariaGimenezBenitez100% (1)
- TerraSync - Operation Guide - 240 - ESP PDFDocumento607 páginasTerraSync - Operation Guide - 240 - ESP PDFandreazuvAinda não há avaliações
- Aloka Ultrasonido PDFDocumento75 páginasAloka Ultrasonido PDFEmili Betancourt0% (3)
- Hivec 2 Textbook - Spanish PDFDocumento31 páginasHivec 2 Textbook - Spanish PDFluischaconserinAinda não há avaliações
- Motor Asíncrono TrifásicoDocumento8 páginasMotor Asíncrono Trifásicoaratecno83% (6)
- Cinta TransportadoraDocumento9 páginasCinta TransportadoraNestor AlegreAinda não há avaliações
- Practica Tia Portal 1Documento208 páginasPractica Tia Portal 1azzszo100% (1)
- Cálculo de Turbina FrancisDocumento10 páginasCálculo de Turbina FrancisDanny Huaman OrueAinda não há avaliações
- Histroia Del Motor Electrico Corriente ContinuaDocumento3 páginasHistroia Del Motor Electrico Corriente ContinuaNuestro Amor Sera Leyenda100% (1)
- Preguntas Capitulo 8Documento2 páginasPreguntas Capitulo 8Juan Jose Perez DiazAinda não há avaliações
- Practica 5 - Operación Del Motor Con Carga y Corriente de ArranqueDocumento8 páginasPractica 5 - Operación Del Motor Con Carga y Corriente de ArranqueDavid GonzalezAinda não há avaliações
- Declaracion de Impacto Ambiental para La Instalacion de Estacion de Servicio y Gasocentro GLPDocumento124 páginasDeclaracion de Impacto Ambiental para La Instalacion de Estacion de Servicio y Gasocentro GLPAaron PolancoAinda não há avaliações
- Máquinas Electricas PreguntasDocumento7 páginasMáquinas Electricas Preguntaswilliam enriquezAinda não há avaliações
- ActividadCorrecciónf pCEIIResueltoDocumento3 páginasActividadCorrecciónf pCEIIResueltoPaola de LeonAinda não há avaliações
- 3Documento4 páginas3Elvis TubonAinda não há avaliações
- 1 108 Amp 50 HP S 450 RPM 220 V 60 HZ: Datos Motor FP Unidad EstrellaDocumento1 página1 108 Amp 50 HP S 450 RPM 220 V 60 HZ: Datos Motor FP Unidad EstrellaAna LucyAinda não há avaliações
- Separata de Problemas de Máquinas DC 2018-IDocumento9 páginasSeparata de Problemas de Máquinas DC 2018-IImanol Valdivia LugoAinda não há avaliações
- Motores EléctricosDocumento11 páginasMotores EléctricosPedro Vázquez RodríguezAinda não há avaliações
- Ejemplo de Examen 2Documento9 páginasEjemplo de Examen 2TaloNatalacioAinda não há avaliações
- Generador de CDDocumento31 páginasGenerador de CDMiguel GonzalezAinda não há avaliações
- Practica 1 Maquinas Ii Capitulo17 PDFDocumento7 páginasPractica 1 Maquinas Ii Capitulo17 PDFLizbeth GalanAinda não há avaliações
- Problema 3 Motores AsíncronosDocumento3 páginasProblema 3 Motores Asíncronoshheber97Ainda não há avaliações
- Problemas de Maquinas de Corriente ContinuaDocumento15 páginasProblemas de Maquinas de Corriente ContinuaHenry FelicesAinda não há avaliações
- Motor de Rotor DevanadoDocumento8 páginasMotor de Rotor DevanadoOscar FloresAinda não há avaliações
- 02 - Arranque de Motores 3FDocumento19 páginas02 - Arranque de Motores 3FjuanAinda não há avaliações
- Motor de ReluctanciaDocumento6 páginasMotor de ReluctanciaDavid MolinaAinda não há avaliações
- Maquinas de Inducción Doblemente AlimentadaDocumento14 páginasMaquinas de Inducción Doblemente AlimentadaRaul CacchioneAinda não há avaliações
- Ensayo de Motores ElectricosDocumento22 páginasEnsayo de Motores ElectricosirvinelectromecanicoAinda não há avaliações
- Grupo 14Documento10 páginasGrupo 14Oscar Enrique Ojeda GarciaAinda não há avaliações
- HT 4Documento3 páginasHT 4MatthiasSibrianAinda não há avaliações
- Articulo de Máquinas EléctricasDocumento17 páginasArticulo de Máquinas EléctricasRichard Sosa SolisAinda não há avaliações
- Ejercicios Unidad 2 CaixbaDocumento6 páginasEjercicios Unidad 2 CaixbaedgarAinda não há avaliações
- Motor de Inducción de Arranque Por Reluctancia OtroDocumento3 páginasMotor de Inducción de Arranque Por Reluctancia OtroJonathan Chacha0% (1)
- Reporte Practica 1-Maquinas ElectricasDocumento23 páginasReporte Practica 1-Maquinas ElectricasAlejandro Luna Cardenas100% (2)
- Capitulo 17Documento8 páginasCapitulo 17ENMANUEL GOMEZ CABAAinda não há avaliações
- Ejercicios TransformadoresDocumento13 páginasEjercicios TransformadoresJamir Burgos RamirezAinda não há avaliações
- Examen Maq - CC 2º Parcial SolucionadoDocumento7 páginasExamen Maq - CC 2º Parcial SolucionadoJaimeAinda não há avaliações
- Maquinas 2Documento6 páginasMaquinas 2Daniel BastaardooAinda não há avaliações
- Tipos de Hidreléctricas y Sus Partes en PanamáDocumento14 páginasTipos de Hidreléctricas y Sus Partes en PanamáCésar NavarroAinda não há avaliações
- Laboratorio #2 - Ensayo Circuito Abierto y Corto CircuitoDocumento6 páginasLaboratorio #2 - Ensayo Circuito Abierto y Corto CircuitoPeeterCampos_Ainda não há avaliações
- Experimentos Con Equipo ElectricoDocumento11 páginasExperimentos Con Equipo ElectricoFelixAvila33% (6)
- 1Documento3 páginas1Geraldo PitaAinda não há avaliações
- Preg 06Documento5 páginasPreg 06David RuizAinda não há avaliações
- Conclusiones Informe 5 Lab Maquinas 1Documento4 páginasConclusiones Informe 5 Lab Maquinas 1Jefferson PachecoAinda não há avaliações
- ProblemasDocumento3 páginasProblemasAgustín RemacheAinda não há avaliações
- Maquinas ElectricasDocumento7 páginasMaquinas ElectricasErick MalagaAinda não há avaliações
- Campo Magnetico Giratorio y Las Redes TrifásicasDocumento5 páginasCampo Magnetico Giratorio y Las Redes TrifásicasCADILLO VILLANUEVA ALONSOAinda não há avaliações
- Informe 3 - Banco de Transformadore Monofásicos en Red TrifásicaDocumento6 páginasInforme 3 - Banco de Transformadore Monofásicos en Red TrifásicaGabriel van BastenAinda não há avaliações
- Generadores en Paralelo PDFDocumento37 páginasGeneradores en Paralelo PDFAviles DavAinda não há avaliações
- Practica 4 Maquinas SincronasDocumento8 páginasPractica 4 Maquinas SincronasDaxterMancerAinda não há avaliações
- Generador de Corriente AlternaDocumento6 páginasGenerador de Corriente AlternaJulio Nejer Maguiña ChavezAinda não há avaliações
- Unidad 1 Rectificadores No Controlados PDFDocumento13 páginasUnidad 1 Rectificadores No Controlados PDFLuis Felipe Lopez PerezAinda não há avaliações
- Se Tiene Un Turbocompresor Axial Que Gira A 9500 RPM y Maneja Una Caudal de 15 KGDocumento1 páginaSe Tiene Un Turbocompresor Axial Que Gira A 9500 RPM y Maneja Una Caudal de 15 KGnilson silva cotrina0% (1)
- Unidad 6 de Maquina ElectricasDocumento7 páginasUnidad 6 de Maquina Electricasdiablito_94Ainda não há avaliações
- Ejercicios MaquinariasIIDocumento58 páginasEjercicios MaquinariasIIHolguer NoriegaAinda não há avaliações
- Diagrama Unifilar de Un Sistema HibridoDocumento1 páginaDiagrama Unifilar de Un Sistema HibridowalAinda não há avaliações
- Características Del Motor de Inducción Bajo Varias Condiciones de CargaDocumento43 páginasCaracterísticas Del Motor de Inducción Bajo Varias Condiciones de CargaJuan Carlos PozoAinda não há avaliações
- PROBLEMAS Generadores DCDocumento2 páginasPROBLEMAS Generadores DCDeyvis Oscar Florez HachaAinda não há avaliações
- Ejercicios Cap 4Documento24 páginasEjercicios Cap 4Alisson HerreraAinda não há avaliações
- Ejercicios Maquinas ElectricasDocumento4 páginasEjercicios Maquinas ElectricasElias PonteAinda não há avaliações
- PP Tema 6 - Maquinas ElectricasDocumento29 páginasPP Tema 6 - Maquinas ElectricasGuille AraujoAinda não há avaliações
- Practica 2 Polaridad Aditiva y Sustractiva Equipo A3Documento16 páginasPractica 2 Polaridad Aditiva y Sustractiva Equipo A3Edwin Nepomuceno Romero100% (1)
- Resumen-Propulsores de Corriente AlternaDocumento12 páginasResumen-Propulsores de Corriente AlternaGILARIAS77Ainda não há avaliações
- Electrónica de Potencia MirandaDocumento29 páginasElectrónica de Potencia Mirandasergio eduardo samanamud leonAinda não há avaliações
- Maquinas de Corriente AlternaDocumento8 páginasMaquinas de Corriente AlternaMarcos FlorezAinda não há avaliações
- Examen Final Maq Elect II 2017-I Niño Ruiz Jose AntonioDocumento17 páginasExamen Final Maq Elect II 2017-I Niño Ruiz Jose Antoniojose niñoAinda não há avaliações
- CV Luis M Gimenez BenitezDocumento2 páginasCV Luis M Gimenez BenitezLuisMariaGimenezBenitezAinda não há avaliações
- Criterio de RouthDocumento16 páginasCriterio de RouthLuisMariaGimenezBenitezAinda não há avaliações
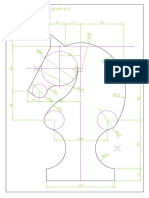
- Caballo Ajedrez PDFDocumento1 páginaCaballo Ajedrez PDFLuisMariaGimenezBenitezAinda não há avaliações
- Engranajes 2Documento14 páginasEngranajes 2Oscar ChacónAinda não há avaliações
- Fms200904 Calculo de La Banda Transportadora 304 SPDocumento16 páginasFms200904 Calculo de La Banda Transportadora 304 SPFernando Omar ArenaAinda não há avaliações
- Sinop TicoDocumento1 páginaSinop TicoLuisMariaGimenezBenitezAinda não há avaliações
- Ejercicios Resueltosrespuesta Transitoria de Sistemas de Contro - ProblemaslDocumento14 páginasEjercicios Resueltosrespuesta Transitoria de Sistemas de Contro - ProblemaslLuisMariaGimenezBenitezAinda não há avaliações
- Salud Materno InfantilDocumento23 páginasSalud Materno InfantilLuisMariaGimenezBenitezAinda não há avaliações
- Ejercicio 1Documento1 páginaEjercicio 1LuisMariaGimenezBenitezAinda não há avaliações
- Pulsadores de CCDocumento26 páginasPulsadores de CCLuisMariaGimenezBenitezAinda não há avaliações
- Resumen Pliego Tarifas 20Documento1 páginaResumen Pliego Tarifas 20Roberto RiquelmeAinda não há avaliações
- Secadores Mio32Documento11 páginasSecadores Mio32Lucia Isabel Cajachuan ValeraAinda não há avaliações
- Clasificacion de Los AntibioticosDocumento4 páginasClasificacion de Los AntibioticosLuisMariaGimenezBenitezAinda não há avaliações
- Trabajo de InfectologiiaDocumento46 páginasTrabajo de InfectologiiaLuisMariaGimenezBenitezAinda não há avaliações
- MAIZ - Cadena de Valor AgregadoDocumento36 páginasMAIZ - Cadena de Valor AgregadoEmmanuel MéndezAinda não há avaliações
- Convertidor CC - CC Probl EjemploDocumento9 páginasConvertidor CC - CC Probl EjemploLuisMariaGimenezBenitezAinda não há avaliações
- ResumenDocumento10 páginasResumenLuisMariaGimenezBenitezAinda não há avaliações
- U1 Mci - 2013Documento14 páginasU1 Mci - 2013LuisMariaGimenezBenitezAinda não há avaliações
- Convertidor CC Cc... PracticaDocumento17 páginasConvertidor CC Cc... PracticaLuisMariaGimenezBenitezAinda não há avaliações
- Convertidor CC - CC Probl EjemploDocumento9 páginasConvertidor CC - CC Probl EjemploLuisMariaGimenezBenitezAinda não há avaliações
- Ejercicio Resuelto DMUXDocumento2 páginasEjercicio Resuelto DMUXSaul Ariel Perez ToroAinda não há avaliações
- Diseno Subestaciones - Raul MartinDocumento256 páginasDiseno Subestaciones - Raul MartinjsadicoxAinda não há avaliações
- 25AGAPLEDocumento8 páginas25AGAPLEJhon Centeno FalconAinda não há avaliações
- Informe Del COMPUTADORDocumento3 páginasInforme Del COMPUTADORGreisy BrazonAinda não há avaliações
- Carta #180-2022 Takeshi - Opinion Tecnica de Ubic. de Bolardo, Maceta y Tacha en ObraDocumento8 páginasCarta #180-2022 Takeshi - Opinion Tecnica de Ubic. de Bolardo, Maceta y Tacha en ObraEduard QRAinda não há avaliações
- Plan de Gestion de InteresadosDocumento8 páginasPlan de Gestion de InteresadosHelberth PereiraAinda não há avaliações
- Apuntes ElectromagnetismoDocumento9 páginasApuntes ElectromagnetismoEfraín de la CruzAinda não há avaliações
- InformeDeAvanceDocumento95 páginasInformeDeAvancecamiloAinda não há avaliações
- Máximo Aprovechamiento de Los Campos Petroleros Maduros 2004Documento1 páginaMáximo Aprovechamiento de Los Campos Petroleros Maduros 2004ojrfgmrfAinda não há avaliações
- Historia Del Desarrollo Del ComputadorDocumento8 páginasHistoria Del Desarrollo Del ComputadoryamileduartebarajAinda não há avaliações
- Catalogo Euro Web9Documento32 páginasCatalogo Euro Web9NELSON ALVAREZAinda não há avaliações
- Presupuesto Arquitectonico para La Construccion de ViviendaDocumento13 páginasPresupuesto Arquitectonico para La Construccion de ViviendasecretariaAinda não há avaliações
- 10-Cargas AxialesDocumento40 páginas10-Cargas AxialesEstefanía De SantiagoAinda não há avaliações
- Asignación de Recursos Del GWD - Grupo 1Documento5 páginasAsignación de Recursos Del GWD - Grupo 1RONNY DIAZAinda não há avaliações
- CAPITULO 4 Apuntes de Cubicación - TerminacionesDocumento6 páginasCAPITULO 4 Apuntes de Cubicación - TerminacionesMauro Alfonso Franjola BaezaAinda não há avaliações
- Cotizacion 059-2019 Concreto Premezclado - Marianella QuenayaDocumento3 páginasCotizacion 059-2019 Concreto Premezclado - Marianella Quenayakevin bejar pilcoAinda não há avaliações
- PreguntasDocumento8 páginasPreguntasLuis Jose GarciaAinda não há avaliações
- Ciencias Basicas Lab 2Documento15 páginasCiencias Basicas Lab 2Fabrizio AmayaAinda não há avaliações
- Unidad IIIDocumento44 páginasUnidad IIIcaresan100% (6)
- Proyecto Feria de La Ciencia (Cilantro)Documento13 páginasProyecto Feria de La Ciencia (Cilantro)Natasha CollinsAinda não há avaliações
- DIAPOSITIVAS Unidad de AlbañileriaDocumento28 páginasDIAPOSITIVAS Unidad de Albañileriayerikaalva0% (1)
- Elementos de La LogisticaDocumento6 páginasElementos de La LogisticaEdith GavilanezAinda não há avaliações
- Ventajas Del ProcesoDocumento4 páginasVentajas Del ProcesoAngelica Daniela Cely GonzalezAinda não há avaliações
- Quiz 75Documento4 páginasQuiz 75Andrea CastelblancoAinda não há avaliações
- Peso MolecularDocumento4 páginasPeso MolecularMartin DiegoAinda não há avaliações
- PyC Tarea Grupal III Parcial PDFDocumento2 páginasPyC Tarea Grupal III Parcial PDFMargie MadridAinda não há avaliações