Você também pode gostar
- Resumen de La MonografíaDocumento13 páginasResumen de La MonografíaHarry LabanAinda não há avaliações
- TEMA3 Ensamblador PDFDocumento14 páginasTEMA3 Ensamblador PDFjuulgazaAinda não há avaliações
- Informe FinalDocumento97 páginasInforme FinalYimyj ZambranoAinda não há avaliações
- Pre Informe 10Documento4 páginasPre Informe 10Jose Eduardo BriceñoAinda não há avaliações
- CD 6996 PDFDocumento265 páginasCD 6996 PDFAkatsukiAinda não há avaliações
- Proyecto PulsadorDocumento2 páginasProyecto PulsadorJoseph PurificaciónAinda não há avaliações
- Pre-Informe Practica 1-Diego GómezDocumento16 páginasPre-Informe Practica 1-Diego GómezDiegoAinda não há avaliações
- Microprocesador 8086Documento11 páginasMicroprocesador 8086hernanmp89Ainda não há avaliações
- Carta Smith Kelvin Briceño - Ruven Fernandez 20% Tercer CorteDocumento5 páginasCarta Smith Kelvin Briceño - Ruven Fernandez 20% Tercer CorteKelvin Briceño0% (1)
- Examen de MicroelectronicaDocumento10 páginasExamen de MicroelectronicaGustavo AriasAinda não há avaliações
- Arduino Cap5 WebDocumento54 páginasArduino Cap5 WebHenry Lois Davila Andrade100% (1)
- Libro Procesamiento Semestre 1Documento298 páginasLibro Procesamiento Semestre 1hugofr888Ainda não há avaliações
- Proyecto de Investigación Servidor Web Domingo 04-10-15Documento57 páginasProyecto de Investigación Servidor Web Domingo 04-10-15ChrisShakurAinda não há avaliações
- Daiagrama de IshikawaDocumento1 páginaDaiagrama de IshikawaNicole AlexandraAinda não há avaliações
- Infografia SemiconductoresDocumento1 páginaInfografia SemiconductoresSergio Andres Fajardo SaldarriagaAinda não há avaliações
- 2021 02 22 Clase de Ondas Guiadas Esime 5.1 m1Documento7 páginas2021 02 22 Clase de Ondas Guiadas Esime 5.1 m1FEDRA FARCA VILLAVICENCIOAinda não há avaliações
- Semana 2Documento1 páginaSemana 2GONZALES SALAZAR DIEGO ALONZOAinda não há avaliações
- Monografia RosmeryQuispe FINALDocumento33 páginasMonografia RosmeryQuispe FINALMike WasouskiAinda não há avaliações
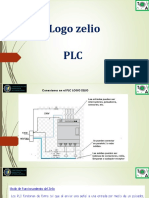
- PLC Zelio Clases 2Documento10 páginasPLC Zelio Clases 2Moises Tacuri MataqqueAinda não há avaliações
- Compuertas Logicas Con Tecnologia TTLDocumento11 páginasCompuertas Logicas Con Tecnologia TTLjose_sanguino_2Ainda não há avaliações
- Informe Final 7Documento12 páginasInforme Final 7Eva Lorena Mendoza ReyesAinda não há avaliações
- Manual de prácticas de laboratorio de dispositivos digitalesDocumento22 páginasManual de prácticas de laboratorio de dispositivos digitalesgabriel beltràn romànAinda não há avaliações
- INFORME IEEE de Semaforo Vehicular y Peatonal Con PIC 16F877ADocumento3 páginasINFORME IEEE de Semaforo Vehicular y Peatonal Con PIC 16F877ASanti HernandezAinda não há avaliações
- Instrucciones para Programar Pic 16f877a - ByencaDocumento9 páginasInstrucciones para Programar Pic 16f877a - ByencaNolberto CopaAinda não há avaliações
- Sistemas trifásicos: estructura, tensiones, conexiones y cálculo de potenciaDocumento36 páginasSistemas trifásicos: estructura, tensiones, conexiones y cálculo de potenciaMargarita SaintAinda não há avaliações
- Resumen de Hoja de Datos PIC16F877Documento21 páginasResumen de Hoja de Datos PIC16F87724santi100% (1)
- Unidad 2Documento21 páginasUnidad 2c.j. rodriquezAinda não há avaliações
- Historia de La Graficación Por ComputadoraDocumento10 páginasHistoria de La Graficación Por ComputadoraAntonio Acosta Murillo100% (2)
- Contador Descendente de 0 A 99 Usando Display Cátodo Común.Documento3 páginasContador Descendente de 0 A 99 Usando Display Cátodo Común.carlosAinda não há avaliações
- Tutorial de MAX Plus 2Documento12 páginasTutorial de MAX Plus 2Tim Robles MartínezAinda não há avaliações
- Guía para Diseño Con El MAX PLUS IIDocumento8 páginasGuía para Diseño Con El MAX PLUS IIElias EstebanAinda não há avaliações
- Unidad # 1 Television AnalogicaDocumento59 páginasUnidad # 1 Television AnalogicaJostin MaldonadoAinda não há avaliações
- Bluetooth PIC PDFDocumento6 páginasBluetooth PIC PDFAbel EstevezAinda não há avaliações
- Procesamiento de Señales y Funciones Periódicas Usando MatlabDocumento14 páginasProcesamiento de Señales y Funciones Periódicas Usando Matlabanthony faves carrilloAinda não há avaliações
- Clasificación Cuentas BalanceDocumento4 páginasClasificación Cuentas BalanceAris JuniorAinda não há avaliações
- BIC01-Introducción A La Computación - Final PDFDocumento2 páginasBIC01-Introducción A La Computación - Final PDFgianAinda não há avaliações
- Mezclador de Audio-1Documento5 páginasMezclador de Audio-1Ricardo Ramírez AngelesAinda não há avaliações
- Codigo para Hacer Una Calculadora en PythonDocumento13 páginasCodigo para Hacer Una Calculadora en PythonfjsalinasAinda não há avaliações
- Diferencias Entre Puertos PCIDocumento4 páginasDiferencias Entre Puertos PCIerik_evhaAinda não há avaliações
- Amplificador DiferencialDocumento6 páginasAmplificador DiferencialDanielQCAinda não há avaliações
- Filtros Digitales MATLABDocumento65 páginasFiltros Digitales MATLABCarlos PuchaicelaAinda não há avaliações
- Preguntas GeometriaDocumento3 páginasPreguntas GeometriaYessenia R CAinda não há avaliações
- Guia Ejercicios Parte 3. Transistores BJTDocumento9 páginasGuia Ejercicios Parte 3. Transistores BJTDeidi Angelen Mendoza VarelaAinda não há avaliações
- ApuntesDocumento127 páginasApuntesJonathan MillsAinda não há avaliações
- Guía para Elaborar El Informe - Ley de OhmDocumento8 páginasGuía para Elaborar El Informe - Ley de Ohmhendry araujoAinda não há avaliações
- Labo Proc. Digital de SeñalesDocumento2 páginasLabo Proc. Digital de SeñalesVanessa VásquezAinda não há avaliações
- Practica - 03 - 1S - 2021 LABORATORIO ELECTRONICA 6 USACDocumento2 páginasPractica - 03 - 1S - 2021 LABORATORIO ELECTRONICA 6 USACPedro SalojAinda não há avaliações
- Sistemas Digitales SecuencialesDocumento15 páginasSistemas Digitales SecuencialesOvanio MolinaAinda não há avaliações
- Lab1-Arquitectura PIC16F877Documento8 páginasLab1-Arquitectura PIC16F877Brian Parado LeonAinda não há avaliações
- Silabos Electronica InfDocumento101 páginasSilabos Electronica InfJoseAinda não há avaliações
- PAuL JEFFREY PILLHUAMaN MORALES - 2020-I - EXAMEN-PARCIAL PDFDocumento1 páginaPAuL JEFFREY PILLHUAMaN MORALES - 2020-I - EXAMEN-PARCIAL PDFPaul Jeffry Pillhuaman MoralesAinda não há avaliações
- Preguntas y Respuestas Frecuentes de Espectro Radioeléctrico en Colombia - Enciclopedia Del Estado - Portal Del Estado ColombianoDocumento10 páginasPreguntas y Respuestas Frecuentes de Espectro Radioeléctrico en Colombia - Enciclopedia Del Estado - Portal Del Estado ColombianorukismenAinda não há avaliações
- Conectores de Audio y VídeoDocumento3 páginasConectores de Audio y VídeoCarlos Feenando Campos MonterrosaAinda não há avaliações
- Guía didáctica de aprendizaje para el desarrollo de aplicaciones con microcontroladores PIC de 8 bits usando la plataforma PIC DISCOVERYDocumento82 páginasGuía didáctica de aprendizaje para el desarrollo de aplicaciones con microcontroladores PIC de 8 bits usando la plataforma PIC DISCOVERYgermanAinda não há avaliações
- Práctica 09 Áreas Entre CurvasDocumento8 páginasPráctica 09 Áreas Entre CurvasRusbel ValdiviaAinda não há avaliações
- Control temperatura PICDocumento12 páginasControl temperatura PICUniElectronicaAinda não há avaliações
- Programación PLC y HMI llenado botellasDocumento8 páginasProgramación PLC y HMI llenado botellasSantiago GuilcazoAinda não há avaliações
- Reporte de Carrito Arduino3.0Documento14 páginasReporte de Carrito Arduino3.0Osiel RendonAinda não há avaliações
- Informe OxímetroDocumento5 páginasInforme OxímetroJessica AcsinteAinda não há avaliações
- Solicitud de Cambio de EppDocumento1 páginaSolicitud de Cambio de EppHenjOx Gómez FarfánAinda não há avaliações
- Charlas de 5 MinutosDocumento294 páginasCharlas de 5 MinutosJuanPabloZuñiga100% (14)
- 339 Charlas de SeguridadDocumento433 páginas339 Charlas de SeguridadAngelo Rodriguez VallejosAinda não há avaliações
- InstruccionesDocumento4 páginasInstruccionesHenjOx Gómez FarfánAinda não há avaliações
- Checklist Elevador PlataformaDocumento3 páginasChecklist Elevador PlataformaHenjOx Gómez FarfánAinda não há avaliações
- Requisitos y Planilla Racda Generador 2016Documento16 páginasRequisitos y Planilla Racda Generador 2016HenjOx Gómez FarfánAinda não há avaliações
- CiudadanaDocumento2 páginasCiudadanaHenjOx Gómez FarfánAinda não há avaliações
- Requisitos y Planilla Racda Generador 2016Documento16 páginasRequisitos y Planilla Racda Generador 2016HenjOx Gómez FarfánAinda não há avaliações
- CiudadanaDocumento2 páginasCiudadanaHenjOx Gómez FarfánAinda não há avaliações
- Recaudos Cuenta Ahorro PersonaDocumento1 páginaRecaudos Cuenta Ahorro PersonaOsmary SanchezAinda não há avaliações
- LiuconsaDocumento89 páginasLiuconsaAzul PatricioAinda não há avaliações
- Glosario de Términos InformáticosDocumento3 páginasGlosario de Términos Informáticosaydd220% (1)
- EDA Rent A Car v2Documento23 páginasEDA Rent A Car v2Fernando Meléndez MeléndezAinda não há avaliações
- Analisis y Diseno de Sistemas Capitulo 10Documento3 páginasAnalisis y Diseno de Sistemas Capitulo 10Randy Berks67% (6)
- Debian Seguridad PDFDocumento135 páginasDebian Seguridad PDFJorge Andres Cultid MejiaAinda não há avaliações
- Apunte de CarlitosDocumento7 páginasApunte de Carlitosfacuoli_22_14Ainda não há avaliações
- Ingeografos - Mapbasic (Programación en MapInfo) PDFDocumento6 páginasIngeografos - Mapbasic (Programación en MapInfo) PDFnostradamus900Ainda não há avaliações
- PARCIAL Ivonne EstradaDocumento8 páginasPARCIAL Ivonne EstradaIvonne EstradaAinda não há avaliações
- Caracteristicas de Un PLCDocumento2 páginasCaracteristicas de Un PLCDeyvi Cuayla100% (1)
- Creación y Administración de Certificados Digitales en CentOSDocumento19 páginasCreación y Administración de Certificados Digitales en CentOSmetalpastoAinda não há avaliações
- Codigos BinariosDocumento3 páginasCodigos BinariosCoyjafet 0902Ainda não há avaliações
- Cálculo Sencillo Del Coeficiente de ConsanguinidadDocumento2 páginasCálculo Sencillo Del Coeficiente de Consanguinidadarmando terrones yoplaAinda não há avaliações
- Manual de Tramite Documentario - Cliente - PDFDocumento14 páginasManual de Tramite Documentario - Cliente - PDFJuan Carlos Juarez VargasAinda não há avaliações
- Subir bandera velocidadDocumento13 páginasSubir bandera velocidadlocorevolucionarioAinda não há avaliações
- Power Bi MicrosoftDocumento2.563 páginasPower Bi MicrosoftErick Castillo100% (4)
- Maquinas VirtualesDocumento4 páginasMaquinas VirtualesWellington BasilioAinda não há avaliações
- Comandos MS-DOSDocumento8 páginasComandos MS-DOSManuela RamírezAinda não há avaliações
- Metodo SimplexDocumento26 páginasMetodo Simplex71_elAAinda não há avaliações
- Trabajo Final EstadisticaDocumento5 páginasTrabajo Final EstadisticaAlandmrAinda não há avaliações
- Tabla Instrucciones MIPSDocumento2 páginasTabla Instrucciones MIPSdiuliozAinda não há avaliações
- Proxyserver WebsiteDocumento18 páginasProxyserver WebsitejynumaAinda não há avaliações
- Macrocomputadoras Equipo 1Documento7 páginasMacrocomputadoras Equipo 1héctor_cortés_8Ainda não há avaliações
- Manual CobolDocumento56 páginasManual CobolpuertasrojasAinda não há avaliações
- Mantenimiento de La PCDocumento19 páginasMantenimiento de La PCJuan GarzaAinda não há avaliações
- Batch Script TutorialDocumento25 páginasBatch Script TutorialAbdelilah El GuenfoudAinda não há avaliações
- Prueba Tecnica JR Back+Front FMDocumento2 páginasPrueba Tecnica JR Back+Front FMHarold GarciaAinda não há avaliações
- GrafoidesDocumento4 páginasGrafoidesNicolas Martin Valera la TorreAinda não há avaliações
- Rap 1Documento5 páginasRap 1Manuel ParadaAinda não há avaliações
- Trabajo EyzaguirreDocumento12 páginasTrabajo EyzaguirreMaicol CUAinda não há avaliações
- Maquinas VirtualesDocumento12 páginasMaquinas VirtualesAlexandra Molano RodríguezAinda não há avaliações
- Cómo Frustrar A Los Delincuentes CibernéticosDocumento25 páginasCómo Frustrar A Los Delincuentes Cibernéticosdaniel alejandro amado calzadoAinda não há avaliações