Você também pode gostar
- International Journal of Game Theory and Technology (IJGTT)Documento2 páginasInternational Journal of Game Theory and Technology (IJGTT)CS & ITAinda não há avaliações
- Ijait CFPDocumento2 páginasIjait CFPijaitjournalAinda não há avaliações
- International Journal of Game Theory and Technology (IJGTT)Documento2 páginasInternational Journal of Game Theory and Technology (IJGTT)CS & ITAinda não há avaliações
- International Journal of Chaos, Control, Modelling and Simulation (IJCCMS)Documento3 páginasInternational Journal of Chaos, Control, Modelling and Simulation (IJCCMS)Anonymous w6iqRPAAinda não há avaliações
- Free Publications : Scope & TopicsDocumento2 páginasFree Publications : Scope & TopicscseijAinda não há avaliações
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Documento2 páginasInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZAinda não há avaliações
- Call For Papers-The International Journal of Ambient Systems and Applications (IJASA)Documento2 páginasCall For Papers-The International Journal of Ambient Systems and Applications (IJASA)CS & ITAinda não há avaliações
- Graph HocDocumento1 páginaGraph HocMegan BellAinda não há avaliações
- The International Journal of Ambient Systems and Applications (IJASA)Documento2 páginasThe International Journal of Ambient Systems and Applications (IJASA)Anonymous 9IlMYYx8Ainda não há avaliações
- Call For Papers-The International Journal of Ambient Systems and Applications (IJASA)Documento2 páginasCall For Papers-The International Journal of Ambient Systems and Applications (IJASA)CS & ITAinda não há avaliações
- Graph HocDocumento1 páginaGraph HocMegan BellAinda não há avaliações
- Ijait CFPDocumento2 páginasIjait CFPijaitjournalAinda não há avaliações
- Graph HocDocumento1 páginaGraph HocMegan BellAinda não há avaliações
- International Journal of Chaos, Control, Modelling and Simulation (IJCCMS)Documento3 páginasInternational Journal of Chaos, Control, Modelling and Simulation (IJCCMS)Anonymous w6iqRPAAinda não há avaliações
- Call For Papers-The International Journal of Ambient Systems and Applications (IJASA)Documento2 páginasCall For Papers-The International Journal of Ambient Systems and Applications (IJASA)CS & ITAinda não há avaliações
- International Journal of Chaos, Control, Modelling and Simulation (IJCCMS)Documento3 páginasInternational Journal of Chaos, Control, Modelling and Simulation (IJCCMS)Anonymous w6iqRPAAinda não há avaliações
- Free Publications : Scope & TopicsDocumento2 páginasFree Publications : Scope & TopicscseijAinda não há avaliações
- International Journal of Game Theory and Technology (IJGTT)Documento2 páginasInternational Journal of Game Theory and Technology (IJGTT)CS & ITAinda não há avaliações
- Ijait CFPDocumento2 páginasIjait CFPijaitjournalAinda não há avaliações
- International Journal of Game Theory and Technology (IJGTT)Documento2 páginasInternational Journal of Game Theory and Technology (IJGTT)CS & ITAinda não há avaliações
- International Journal On Soft Computing, Artificial Intelligence and Applications (IJSCAI)Documento2 páginasInternational Journal On Soft Computing, Artificial Intelligence and Applications (IJSCAI)ijscaiAinda não há avaliações
- Ijait CFPDocumento2 páginasIjait CFPijaitjournalAinda não há avaliações
- Graph HocDocumento1 páginaGraph HocMegan BellAinda não há avaliações
- International Journal of Peer-To-Peer Networks (IJP2P)Documento2 páginasInternational Journal of Peer-To-Peer Networks (IJP2P)Ashley HowardAinda não há avaliações
- International Journal of Security, Privacy and Trust Management (IJSPTM)Documento2 páginasInternational Journal of Security, Privacy and Trust Management (IJSPTM)ijsptmAinda não há avaliações
- Free Publications : Scope & TopicsDocumento2 páginasFree Publications : Scope & TopicscseijAinda não há avaliações
- International Journal of Chaos, Control, Modelling and Simulation (IJCCMS)Documento3 páginasInternational Journal of Chaos, Control, Modelling and Simulation (IJCCMS)Anonymous w6iqRPAAinda não há avaliações
- International Journal On Soft Computing (IJSC)Documento1 páginaInternational Journal On Soft Computing (IJSC)Matthew JohnsonAinda não há avaliações
- International Journal On Soft Computing, Artificial Intelligence and Applications (IJSCAI)Documento2 páginasInternational Journal On Soft Computing, Artificial Intelligence and Applications (IJSCAI)ijscaiAinda não há avaliações
- International Journal On Soft Computing (IJSC)Documento1 páginaInternational Journal On Soft Computing (IJSC)Matthew JohnsonAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- D Praveen Kumar ChaubeyDocumento2 páginasD Praveen Kumar ChaubeyyouvsyouAinda não há avaliações
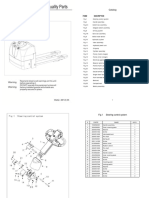
- Catalog: Ningbo Liftstar Material Handling Equipment Co., LTDDocumento27 páginasCatalog: Ningbo Liftstar Material Handling Equipment Co., LTDKiều Văn TrungAinda não há avaliações
- Bernette Ramirez Mariano Bernette Ramirez MarianoDocumento1 páginaBernette Ramirez Mariano Bernette Ramirez Marianomia palacioAinda não há avaliações
- Refrigerator: Service ManualDocumento44 páginasRefrigerator: Service ManualBetileno QuadAlexAinda não há avaliações
- Chapter 14 - Storm and Sanitary Analysis PDFDocumento41 páginasChapter 14 - Storm and Sanitary Analysis PDFdobridorinAinda não há avaliações
- Liebert PDX PCW Thermal Management System User ManualDocumento184 páginasLiebert PDX PCW Thermal Management System User ManualJeffAinda não há avaliações
- Centrifugal PumpDocumento56 páginasCentrifugal Pumpchandraa2208Ainda não há avaliações
- Propeller Stockpile Measurement and Reports With Drone Surveying EbookDocumento17 páginasPropeller Stockpile Measurement and Reports With Drone Surveying EbookmuazeemK100% (1)
- The PA Bible Addn 03 Microphones PDFDocumento4 páginasThe PA Bible Addn 03 Microphones PDFjosiasns5257100% (1)
- Excel 2010 Cheatsheet PDFDocumento2 páginasExcel 2010 Cheatsheet PDFVinith VimalAinda não há avaliações
- B.tech Regular Examination Fee Registration FormDocumento1 páginaB.tech Regular Examination Fee Registration FormvishwasAinda não há avaliações
- Curriculum Vitae: Dr.N.PRABHU, M.SC., M.Phil, PH.DDocumento6 páginasCurriculum Vitae: Dr.N.PRABHU, M.SC., M.Phil, PH.DPavanAinda não há avaliações
- f77 f55 User ManualDocumento36 páginasf77 f55 User ManualGabi GabrielAinda não há avaliações
- YesDocumento80 páginasYesRonnie TorresAinda não há avaliações
- American University of Beirut Aub Thesis TemplateDocumento12 páginasAmerican University of Beirut Aub Thesis TemplateHassane EzzeddineAinda não há avaliações
- Din en 14080-2005Documento36 páginasDin en 14080-2005Debreteni Florin100% (2)
- Fema 154 FormsDocumento3 páginasFema 154 FormslesgiuAinda não há avaliações
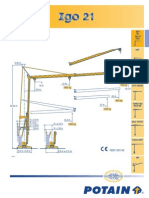
- Potain Igo 21 PDFDocumento4 páginasPotain Igo 21 PDFMarco CruzAinda não há avaliações
- CRX Seat Diassembly & Assembly 1Documento9 páginasCRX Seat Diassembly & Assembly 1ocdank19806116Ainda não há avaliações
- Technical Brochure Metal Ceilings V100-V200-en EUDocumento12 páginasTechnical Brochure Metal Ceilings V100-V200-en EUNicu PotîngAinda não há avaliações
- Catalogo CMCDocumento145 páginasCatalogo CMCalyboscanAinda não há avaliações
- Synopsis of Power FactorDocumento10 páginasSynopsis of Power FactorRavi TiwariAinda não há avaliações
- Training CoursesDocumento16 páginasTraining CoursesFeroz KhanAinda não há avaliações
- Business Plan On Plastic Recycling & ManufacturingDocumento19 páginasBusiness Plan On Plastic Recycling & ManufacturingSah Sanjiv KumarAinda não há avaliações
- Brain Controlled Car For Disabled Using Artificial IntelligenceDocumento17 páginasBrain Controlled Car For Disabled Using Artificial IntelligenceMdkhanzAinda não há avaliações
- Depth of InvestigationDocumento8 páginasDepth of InvestigationGogot Pantja ParijogoAinda não há avaliações
- California Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsDocumento4 páginasCalifornia Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsAmyra MiaAinda não há avaliações
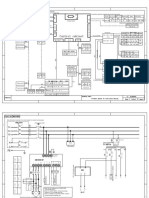
- Wire Diagram Complete Elevator - SL ELEVATOR 20190805Documento23 páginasWire Diagram Complete Elevator - SL ELEVATOR 20190805Eka Rama100% (2)
- 312 Excavators Hydraulic System: Component ListDocumento2 páginas312 Excavators Hydraulic System: Component ListRr hardiyantoAinda não há avaliações
- Sigma Marine Coatings Manual - Part44Documento2 páginasSigma Marine Coatings Manual - Part44EngTamerAinda não há avaliações