Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Formula SheetDocumento1 páginaFormula SheetSaleem SheikhAinda não há avaliações
- Terms and Abbreviations - Fundamentals of Piano PracticeDocumento2 páginasTerms and Abbreviations - Fundamentals of Piano PracticeModitha LakshanAinda não há avaliações
- Lab 2Documento13 páginasLab 2Moditha LakshanAinda não há avaliações
- TimeDocumento2 páginasTimeModitha LakshanAinda não há avaliações
- Treating OnychomycosisDocumento10 páginasTreating OnychomycosisModitha LakshanAinda não há avaliações
- Electronics Ch9Documento36 páginasElectronics Ch9Moditha LakshanAinda não há avaliações
- DS2890Documento27 páginasDS2890Moditha LakshanAinda não há avaliações
- Analog MultiplierDocumento8 páginasAnalog MultiplierjapauAinda não há avaliações
- EE423 Power Systems Analysis Final ExaminationDocumento3 páginasEE423 Power Systems Analysis Final ExaminationModitha LakshanAinda não há avaliações
- PIC16F877A Pic Minimum System Development Board JTAG Interface USB Powered - EBayDocumento1 páginaPIC16F877A Pic Minimum System Development Board JTAG Interface USB Powered - EBayModitha LakshanAinda não há avaliações
- Y%S, XLD M Dka %SL Iudcjd Ckrcfha .Eiü M %H: Jeks Fldgi: (I) Jeks Fpoh - IdudkhDocumento2 páginasY%S, XLD M Dka %SL Iudcjd Ckrcfha .Eiü M %H: Jeks Fldgi: (I) Jeks Fpoh - IdudkhModitha LakshanAinda não há avaliações
- Amplitude Modulation AM - Theory & Equations - Radio-ElectronicsDocumento4 páginasAmplitude Modulation AM - Theory & Equations - Radio-ElectronicsModitha LakshanAinda não há avaliações
- Formula SheetDocumento1 páginaFormula SheetSaleem SheikhAinda não há avaliações
- Max5160 Max5161Documento9 páginasMax5160 Max5161Moditha Lakshan100% (1)
- DFTDocumento6 páginasDFTModitha LakshanAinda não há avaliações
- Fault Types and Magnetic Sensor IntroductionDocumento23 páginasFault Types and Magnetic Sensor IntroductionModitha LakshanAinda não há avaliações
- mcp41010 DatasheetDocumento33 páginasmcp41010 DatasheetYoprie RangelAinda não há avaliações
- Vocal Yaman KalyanDocumento2 páginasVocal Yaman KalyanModitha Lakshan50% (2)
- 142.Pc Based Wireless Temp Data LoggerDocumento2 páginas142.Pc Based Wireless Temp Data LoggerModitha LakshanAinda não há avaliações
- Course 07 - DFT (Contd), FFTDocumento48 páginasCourse 07 - DFT (Contd), FFTModitha LakshanAinda não há avaliações
- Amplitude ModulationDocumento24 páginasAmplitude ModulationAlexAinda não há avaliações
- ABRSM Piano Exam 2013Documento19 páginasABRSM Piano Exam 2013cem_mponce100% (1)
- Music Theory On TemprimentDocumento17 páginasMusic Theory On TemprimentModitha LakshanAinda não há avaliações
- Laboratory 3 Digital Filter DesignDocumento8 páginasLaboratory 3 Digital Filter DesignModitha LakshanAinda não há avaliações
- E BillDocumento2 páginasE BillModitha LakshanAinda não há avaliações
- Faraday"s LawDocumento12 páginasFaraday"s LawashrafraziAinda não há avaliações
- Ua 741Documento23 páginasUa 741Moditha LakshanAinda não há avaliações
- D D D D D D D D D: Description/ordering InformationDocumento19 páginasD D D D D D D D D: Description/ordering Informationarunan55Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Servo Motor - RushikeshDocumento17 páginasServo Motor - RushikeshRushikesh wavare100% (2)
- 1111 Midterm一乙Documento5 páginas1111 Midterm一乙joseph930402Ainda não há avaliações
- Uni Lift InstructionsDocumento2 páginasUni Lift InstructionsMarcosPauloGrilloAinda não há avaliações
- Rosemount 150 DatasheetDocumento4 páginasRosemount 150 DatasheetJorge Salas CabanaAinda não há avaliações
- Saudi Aramco Inspection Checklist: D.C. Power System - Installation Inspection SAIC-T-5118 30-Apr-13 TelecomDocumento6 páginasSaudi Aramco Inspection Checklist: D.C. Power System - Installation Inspection SAIC-T-5118 30-Apr-13 TelecomOmer aliAinda não há avaliações
- General Engine Info Aircraft Information Limiting Part InformationDocumento1 páginaGeneral Engine Info Aircraft Information Limiting Part InformationAHAMEDAinda não há avaliações
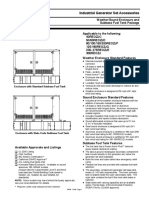
- 40-300REOZJ - G6099 Enclosure Specification SheetDocumento8 páginas40-300REOZJ - G6099 Enclosure Specification SheetĐoàn Trung HậuAinda não há avaliações
- Compresor SanyoDocumento14 páginasCompresor Sanyoroy_velasquez939Ainda não há avaliações
- Introduction To The Microprocessor and MicrocomputerDocumento4 páginasIntroduction To The Microprocessor and MicrocomputerAriane Faye SalongaAinda não há avaliações
- Filtro Carbon ActivoDocumento1 páginaFiltro Carbon ActivoZzmangostazZAinda não há avaliações
- Bd9397efv e PDFDocumento30 páginasBd9397efv e PDFshafiuddin7326Ainda não há avaliações
- Wiring Electrical - AllDocumento15 páginasWiring Electrical - AllArief Rakhmad100% (2)
- Lesson 7 BrakesDocumento35 páginasLesson 7 BrakesAjejejeAinda não há avaliações
- LabGruppen Lab - 1300cDocumento12 páginasLabGruppen Lab - 1300cdodifirmanAinda não há avaliações
- Landers PMS Cost Proposalrev01 - Electric Pro 04apr2023Documento1 páginaLanders PMS Cost Proposalrev01 - Electric Pro 04apr2023IVM PhilsAinda não há avaliações
- Case 580f Tractor Loader Backhoe Operators ManualDocumento8 páginasCase 580f Tractor Loader Backhoe Operators Manualأكرم تيجي100% (1)
- Pricing MatrixDocumento1 páginaPricing Matrixoldschool8Ainda não há avaliações
- Man-1200 Elite RS Installation and Operation Manual Apollo Protocol PDFDocumento156 páginasMan-1200 Elite RS Installation and Operation Manual Apollo Protocol PDFMostafa Ali100% (1)
- Valvetronic ServomotorDocumento1 páginaValvetronic ServomotorIgor PinheiroAinda não há avaliações
- Calibration Volume Lab ReportDocumento4 páginasCalibration Volume Lab ReportJason OwiaAinda não há avaliações
- Cubex 6200 Spec Sheet PDFDocumento4 páginasCubex 6200 Spec Sheet PDFtharciocidreira0% (1)
- BK9105Documento2 páginasBK9105joshi_ragsAinda não há avaliações
- LO550Documento40 páginasLO550alejandro inocenteAinda não há avaliações
- DSF Secondary Power Supply Uninterruptible Power SuppliesDocumento4 páginasDSF Secondary Power Supply Uninterruptible Power SuppliesVinay PallivalppilAinda não há avaliações
- Onkyo Repair-Tips (ET)Documento34 páginasOnkyo Repair-Tips (ET)perico1962100% (1)
- Solution Manual Computer Organization and Architecture 9th Edition William StallingsDocumento13 páginasSolution Manual Computer Organization and Architecture 9th Edition William StallingsAnubhav50% (10)
- Delimon Master CatalogDocumento445 páginasDelimon Master Cataloggruf100% (1)
- Service and Maintenance Manual: Models 3369LE 4069LE M3369 M4069Documento146 páginasService and Maintenance Manual: Models 3369LE 4069LE M3369 M4069Vũ Đình HậuAinda não há avaliações
- Preserving Ariel Reciprocating Compressors For Storage: Preservation Materials and EquipmentDocumento4 páginasPreserving Ariel Reciprocating Compressors For Storage: Preservation Materials and EquipmentaltruismAinda não há avaliações
- Winner Hydraulics - Price List: Index and Part Number Interchange ListDocumento23 páginasWinner Hydraulics - Price List: Index and Part Number Interchange ListSHANEAinda não há avaliações