Você também pode gostar
- Solución de Ejercicios Del Capítulo IIIDocumento21 páginasSolución de Ejercicios Del Capítulo IIIChris Roy Azaña Fernandez44% (9)
- Tarea 7Documento8 páginasTarea 7JonathanDavidRocanoCastillo0% (2)
- NTC-922 Ladrillos Sílico Calcáreos PDFDocumento7 páginasNTC-922 Ladrillos Sílico Calcáreos PDFCamilo Gomez A.Ainda não há avaliações
- Tutorial de AutocadDocumento25 páginasTutorial de AutocadRoman Alex ArocutipaAinda não há avaliações
- Ciclo de RefrigeracionDocumento34 páginasCiclo de RefrigeracionRoman Alex ArocutipaAinda não há avaliações
- 004 Bomba CalorDocumento34 páginas004 Bomba CalorRoman Alex ArocutipaAinda não há avaliações
- Articulo Sobre La Contaminación de Aguas Por Relaves Mineros1Documento6 páginasArticulo Sobre La Contaminación de Aguas Por Relaves Mineros1Roman Alex ArocutipaAinda não há avaliações
- Articulo Sobre La Contaminación de Aguas Por Relaves Mineros1Documento6 páginasArticulo Sobre La Contaminación de Aguas Por Relaves Mineros1Roman Alex ArocutipaAinda não há avaliações
- Informe de AforoDocumento11 páginasInforme de AforoRoman Alex ArocutipaAinda não há avaliações
- Bombas HidraulicasDocumento18 páginasBombas HidraulicasRoman Alex ArocutipaAinda não há avaliações
- Guía para PVP - Shadow Ball CbaDocumento26 páginasGuía para PVP - Shadow Ball CbaMiguel AngelAinda não há avaliações
- Compuestos Orgánico e Inorgánico ElectrolitosDocumento2 páginasCompuestos Orgánico e Inorgánico ElectrolitosDavidl Chuquin0% (1)
- Arte Como IdeaDocumento265 páginasArte Como IdeaWilmer SuárezAinda não há avaliações
- Medidores de Nivel de LíquidosDocumento6 páginasMedidores de Nivel de LíquidosElian Andres Diaz VargasAinda não há avaliações
- 119 - Limites (Teoria Indeterminaciones)Documento3 páginas119 - Limites (Teoria Indeterminaciones)Pipen Cota ZuazoAinda não há avaliações
- Artículo Estimadorde TorqueDocumento12 páginasArtículo Estimadorde TorqueJohnyAlexanderPerezAinda não há avaliações
- Informe#6 HDocumento7 páginasInforme#6 HIZABELLA CHRISTINA SANTOS DA SILVAAinda não há avaliações
- Kurt LewinDocumento7 páginasKurt LewinBrenFlores100% (1)
- 31 Cambio de FaseDocumento4 páginas31 Cambio de FaseEdwin Escalante100% (1)
- Metodo MatricialDocumento9 páginasMetodo MatricialKevin JeansAinda não há avaliações
- Grupo Conico, Primer Eje Trasero ReacondicionamientoDocumento64 páginasGrupo Conico, Primer Eje Trasero ReacondicionamientobrayandparavicinoAinda não há avaliações
- Solucionario Metodos Numericos para Ecuaciones Diferenciales PDFDocumento24 páginasSolucionario Metodos Numericos para Ecuaciones Diferenciales PDFsavageorion5013Ainda não há avaliações
- EHS Guidelines For Wind Energy - Dec2015-SpanishDocumento40 páginasEHS Guidelines For Wind Energy - Dec2015-SpanishIFC SustainabilityAinda não há avaliações
- Taller 3 FisicoquimicaDocumento3 páginasTaller 3 FisicoquimicaMiguel Angel Rozo ArangoAinda não há avaliações
- Hoja de Datos Eca-200Documento2 páginasHoja de Datos Eca-200Oscar A. Zamora0% (1)
- Informe 08 - Victoria Fátima Damián López - 20170012Documento14 páginasInforme 08 - Victoria Fátima Damián López - 20170012Victoria Damián LópezAinda não há avaliações
- Acondicionamiento InvernaderoDocumento14 páginasAcondicionamiento InvernaderoAmy WatsonAinda não há avaliações
- Repartido #5 Teorico Practico Inecuaciones Gst2013Documento8 páginasRepartido #5 Teorico Practico Inecuaciones Gst2013Gabriela FernandezAinda não há avaliações
- Parcial Fisica 2 PDFDocumento5 páginasParcial Fisica 2 PDFTatiana ValenciaAinda não há avaliações
- Lección 02 Objetos de La Criminalistica-1Documento35 páginasLección 02 Objetos de La Criminalistica-1ana maria sanchezAinda não há avaliações
- Relleno FluidoDocumento6 páginasRelleno FluidogertyyAinda não há avaliações
- Cuadro Comparativo de MaterialesDocumento6 páginasCuadro Comparativo de MaterialesJasble Pinzón100% (1)
- Completo El Laberinto Del SignificadoDocumento17 páginasCompleto El Laberinto Del SignificadoShango AguirreAinda não há avaliações
- Material Didactico UNAD QUIMICA GENERAL 201102 PDFDocumento210 páginasMaterial Didactico UNAD QUIMICA GENERAL 201102 PDFEssaú C.Ainda não há avaliações
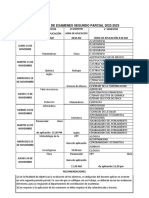
- Segundo Parcial 2022-2023Documento1 páginaSegundo Parcial 2022-2023Megan KeithAinda não há avaliações
- Seminario 11Documento4 páginasSeminario 11CDAMNU0% (1)
- (1965) Lo Mejor de La Ciencia Ficción RusaDocumento203 páginas(1965) Lo Mejor de La Ciencia Ficción Rusarelsinger75% (4)