Você também pode gostar
- Standard Cost EstimateDocumento21 páginasStandard Cost EstimateMOORTHYAinda não há avaliações
- Transfer Function of DC MotorDocumento16 páginasTransfer Function of DC Motorlaabi340% (5)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNota: 2 de 5 estrelas2/5 (1)
- Recipes From The Perfect Scoop by David LebovitzDocumento10 páginasRecipes From The Perfect Scoop by David LebovitzThe Recipe Club100% (7)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetAinda não há avaliações
- Transfer FunctionDocumento40 páginasTransfer FunctionLai Yon Peng67% (3)
- Armature Controlled DCMotor Transfer FunctionDocumento2 páginasArmature Controlled DCMotor Transfer FunctionRGiteya63% (8)
- Ee 331 Design - Servo MotorDocumento5 páginasEe 331 Design - Servo MotorLa-Pierre O'MeallyAinda não há avaliações
- A Differential Equation For DC MotorDocumento7 páginasA Differential Equation For DC MotorAhmed HwaidiAinda não há avaliações
- DC Motor PositionDocumento10 páginasDC Motor PositionearicakAinda não há avaliações
- Transfer Function of Electrical and Mechanical SystemsDocumento21 páginasTransfer Function of Electrical and Mechanical SystemsWigmar GonzalezAinda não há avaliações
- Three Phase Rectifier Controllers Design (Step by Step)Documento44 páginasThree Phase Rectifier Controllers Design (Step by Step)Tshibain Tshibungu100% (1)
- Handbook of Power Systems Engineering with Power Electronics ApplicationsNo EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsAinda não há avaliações
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Ainda não há avaliações
- Principles of Electromechanical Energy ConversionDocumento21 páginasPrinciples of Electromechanical Energy ConversionJehovah CoelhoAinda não há avaliações
- Arbor APS STT Unit 01 Design Basics 25 Jan2018Documento31 páginasArbor APS STT Unit 01 Design Basics 25 Jan2018masterlinh2008Ainda não há avaliações
- Transfer Function of DC MotorDocumento4 páginasTransfer Function of DC MotorKareem AbouelwafaAinda não há avaliações
- Acs 2018s2 Assn1Documento4 páginasAcs 2018s2 Assn1MiraelAinda não há avaliações
- DC Servo MotorDocumento6 páginasDC Servo MotortaindiAinda não há avaliações
- ME2142-2 Lab MAnual Speed and Position ControlDocumento9 páginasME2142-2 Lab MAnual Speed and Position ControlMohammad Taha IrfanAinda não há avaliações
- 1 Flexible Link ProjectDocumento15 páginas1 Flexible Link Projectprasaad08Ainda não há avaliações
- Chapter 4 - Lecture NotesDocumento15 páginasChapter 4 - Lecture NotesZairul IzwanAinda não há avaliações
- DC Motor Modeling Using MATLABDocumento10 páginasDC Motor Modeling Using MATLABmuhmad almtrabieAinda não há avaliações
- Dfig Book PDFDocumento29 páginasDfig Book PDFSrinivasan PurushothamanAinda não há avaliações
- Matlab and Simulink For Modeling and Control DC MotorDocumento14 páginasMatlab and Simulink For Modeling and Control DC MotorGhaleb AlzubairiAinda não há avaliações
- A9R6207Documento8 páginasA9R6207Karito GarciaAinda não há avaliações
- Tugas DPSP - Respon Step Motor DCDocumento4 páginasTugas DPSP - Respon Step Motor DCMuhammad Afghan FadillahAinda não há avaliações
- Control System Assignment 1Documento4 páginasControl System Assignment 1atharvaAinda não há avaliações
- ControlDocumento18 páginasControlSiaka MsaleAinda não há avaliações
- Project Report DCSDocumento51 páginasProject Report DCSEngr XamirAinda não há avaliações
- Mathematical Modeling of Mechanical Systems and Electrical SystemsDocumento49 páginasMathematical Modeling of Mechanical Systems and Electrical SystemsMary DunhamAinda não há avaliações
- Innovative Project Proposal On "Simulation of PR Controller''Documento14 páginasInnovative Project Proposal On "Simulation of PR Controller''prajeet95Ainda não há avaliações
- Mathematical Model - v2Documento22 páginasMathematical Model - v2sitinurulAinda não há avaliações
- ECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesDocumento7 páginasECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesHüseyin Murat PolaterAinda não há avaliações
- GATE EE Sample Test - IDocumento12 páginasGATE EE Sample Test - INayan MannaAinda não há avaliações
- PMSM 3Documento4 páginasPMSM 3VegembogaAinda não há avaliações
- IAT SolutionsDocumento13 páginasIAT Solutionsjay mehtaAinda não há avaliações
- Transfer Function Model For Electric VehicleDocumento10 páginasTransfer Function Model For Electric VehicleFarhan MalikAinda não há avaliações
- My Pid PaperDocumento9 páginasMy Pid PaperUkoima Kelvin NkaloAinda não há avaliações
- GATE Study Material, Forum, Downloads, Discussions & More!Documento17 páginasGATE Study Material, Forum, Downloads, Discussions & More!vims124Ainda não há avaliações
- Control System Lab Manual by AMIT KUMARDocumento35 páginasControl System Lab Manual by AMIT KUMARamit kumar83% (6)
- Base (Reference) PaperDocumento7 páginasBase (Reference) Papermphaniteja2012Ainda não há avaliações
- Control System NotesDocumento199 páginasControl System NotesCarson R. Dick100% (2)
- Ee 2009 Gate PaperDocumento16 páginasEe 2009 Gate Papermass1984Ainda não há avaliações
- EE GATE 2000 Question and AnswersDocumento8 páginasEE GATE 2000 Question and AnswersUTKAL.45Ainda não há avaliações
- Experiment 04Documento7 páginasExperiment 04Zeynal Abidin ŞabaşAinda não há avaliações
- Linear Control Engineering QBDocumento11 páginasLinear Control Engineering QBAkizuki TakaoAinda não há avaliações
- GATE EE 2004 With Solutions PDFDocumento57 páginasGATE EE 2004 With Solutions PDFharshdce60Ainda não há avaliações
- 1996 Deadbeat Control of A Three-Phase Inverter With An Output LC FilterDocumento8 páginas1996 Deadbeat Control of A Three-Phase Inverter With An Output LC FilterTài Nguyễn Minh NhậtAinda não há avaliações
- Mathematical Model of Systems:: Electro Mechanical System Transfer FunctionDocumento17 páginasMathematical Model of Systems:: Electro Mechanical System Transfer Functionchardo santosAinda não há avaliações
- DCS 01 (Dcspeed)Documento16 páginasDCS 01 (Dcspeed)K PranavAinda não há avaliações
- Space Vector Modulation An IntroductionDocumento10 páginasSpace Vector Modulation An IntroductionJohan LinderAinda não há avaliações
- Digital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediaDocumento7 páginasDigital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediamuthukumartharaniAinda não há avaliações
- EE206 Control Systems Tutorial - 18Documento5 páginasEE206 Control Systems Tutorial - 18Haelu KuAinda não há avaliações
- Department of Electrical Engineering Piemr, Indore: Experiment No: 01Documento41 páginasDepartment of Electrical Engineering Piemr, Indore: Experiment No: 01Aayush PatidarAinda não há avaliações
- Simulation of Electric Machine and Drive Systems Using Matlab and SimulinkDocumento17 páginasSimulation of Electric Machine and Drive Systems Using Matlab and SimulinkSamuel Alves de SouzaAinda não há avaliações
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetAinda não há avaliações
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkAinda não há avaliações
- Determinants - DPP 01 (Of Lec 02) - Lakshya JEE 2.0 2024Documento3 páginasDeterminants - DPP 01 (Of Lec 02) - Lakshya JEE 2.0 2024Apurv ChitranshAinda não há avaliações
- JKJKJDocumento3 páginasJKJKJjosecarlosvjAinda não há avaliações
- Sony Cdm82a 82b Cmt-hpx11d Hcd-hpx11d Mechanical OperationDocumento12 páginasSony Cdm82a 82b Cmt-hpx11d Hcd-hpx11d Mechanical OperationDanAinda não há avaliações
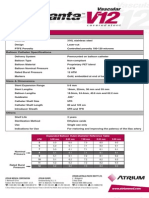
- Advanta V12 Data SheetDocumento2 páginasAdvanta V12 Data SheetJuliana MiyagiAinda não há avaliações
- Douluo Dalu Volume 05 - Star Dou Forest PDFDocumento141 páginasDouluo Dalu Volume 05 - Star Dou Forest PDFRay Joseph LealAinda não há avaliações
- Technical Information: Range-Free Controller FA-M3 System Upgrade GuideDocumento33 páginasTechnical Information: Range-Free Controller FA-M3 System Upgrade GuideAddaAinda não há avaliações
- Socialized HousingDocumento48 páginasSocialized HousingJessieReiVicedoAinda não há avaliações
- 18 Ray Optics Revision Notes QuizrrDocumento108 páginas18 Ray Optics Revision Notes Quizrraafaf.sdfddfaAinda não há avaliações
- SCM (Subway Project Report)Documento13 páginasSCM (Subway Project Report)Beast aAinda não há avaliações
- 3-History Rock Cut MonumentDocumento136 páginas3-History Rock Cut MonumentkrishnaAinda não há avaliações
- 02-Building Cooling LoadsDocumento3 páginas02-Building Cooling LoadspratheeshAinda não há avaliações
- SPL Lab Report3Documento49 páginasSPL Lab Report3nadif hasan purnoAinda não há avaliações
- Chapter 3.c (Centroid by Intergration)Documento15 páginasChapter 3.c (Centroid by Intergration)Ariff AziziAinda não há avaliações
- MarbiehistoryDocumento6 páginasMarbiehistoryMarbie DalanginAinda não há avaliações
- Emw 2007 FP 02093Documento390 páginasEmw 2007 FP 02093boj87Ainda não há avaliações
- Scanner and Xcal Comperative Analysis v2Documento22 páginasScanner and Xcal Comperative Analysis v2Ziya2009Ainda não há avaliações
- 4 Force & ExtensionDocumento13 páginas4 Force & ExtensionSelwah Hj AkipAinda não há avaliações
- Presentation On 4G TechnologyDocumento23 páginasPresentation On 4G TechnologyFresh EpicAinda não há avaliações
- Drilling & GroutingDocumento18 páginasDrilling & GroutingSantosh Laxman PatilAinda não há avaliações
- DISPOSABLE GLOVES CATALOG 2023npDocumento4 páginasDISPOSABLE GLOVES CATALOG 2023npTeodylee CruzAinda não há avaliações
- Module 4 Active Faults and Other Earthquake Sources: Learning OutcomeDocumento3 páginasModule 4 Active Faults and Other Earthquake Sources: Learning OutcomeFatima Ybanez Mahilum-LimbagaAinda não há avaliações
- Oil Whirl and Whip Instabilities - Within Journal BearingsDocumento27 páginasOil Whirl and Whip Instabilities - Within Journal BearingsTalha AamirAinda não há avaliações
- Managing Diabetic Foot Ulcers ReadingDocumento21 páginasManaging Diabetic Foot Ulcers Readinghimanshugupta811997Ainda não há avaliações
- Digging Deeper: Can Hot Air Provide Sustainable Source of Electricity?Documento2 páginasDigging Deeper: Can Hot Air Provide Sustainable Source of Electricity?Рустам ХаджаевAinda não há avaliações
- 12/1/2014 Powder MetallurgyDocumento29 páginas12/1/2014 Powder Metallurgysofyan sam0% (2)
- Dual Shield 7100 Ultra: Typical Tensile PropertiesDocumento3 páginasDual Shield 7100 Ultra: Typical Tensile PropertiesDino Paul Castro HidalgoAinda não há avaliações
- FYP ProposalDocumento11 páginasFYP ProposalArslan SamAinda não há avaliações