Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Power Plant Engineering by G.R.nagpalDocumento729 páginasPower Plant Engineering by G.R.nagpalGoutham Peri74% (23)
- DsfghfdsDocumento1 páginaDsfghfdsAnonymous WjqAsHAinda não há avaliações
- DsfghfdsDocumento2 páginasDsfghfdsAnonymous WjqAsHAinda não há avaliações
- Dsfghfds SDFGSDDocumento1 páginaDsfghfds SDFGSDAnonymous WjqAsHAinda não há avaliações
- Doc on short random text snippetsDocumento2 páginasDoc on short random text snippetsAnonymous WjqAsHAinda não há avaliações
- DsfghfdsDocumento2 páginasDsfghfdsAnonymous WjqAsHAinda não há avaliações
- Key aspects of document organizationDocumento2 páginasKey aspects of document organizationAnonymous WjqAsHAinda não há avaliações
- UAV Landslide MappingDocumento10 páginasUAV Landslide MappingAnonymous WjqAsHAinda não há avaliações
- Saudi Arabia Power StationDocumento108 páginasSaudi Arabia Power StationEhab HarbAinda não há avaliações
- Chap1-Geometrical Optics - ExercisesDocumento3 páginasChap1-Geometrical Optics - ExercisesReema HlohAinda não há avaliações
- The Causes of Shear Cracking in Prestressed Concrete Box Girder BridgesDocumento10 páginasThe Causes of Shear Cracking in Prestressed Concrete Box Girder BridgesVipin Kumar ParasharAinda não há avaliações
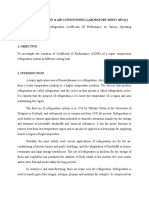
- RefrigerationDocumento11 páginasRefrigerationBroAmirAinda não há avaliações
- Design of A 120 In.-Diameter Steel Bifurcation With A Small Acute Angle For A High-Pressure PenstockDocumento10 páginasDesign of A 120 In.-Diameter Steel Bifurcation With A Small Acute Angle For A High-Pressure PenstockStalynMEcAinda não há avaliações
- Disney Channel JRDocumento14 páginasDisney Channel JRJonna Parane TrongcosoAinda não há avaliações
- 0.9PF PW 380v 3phase HF UPS10-120kvaDocumento8 páginas0.9PF PW 380v 3phase HF UPS10-120kvaArmandinho CaveroAinda não há avaliações
- Control and On-Off Valves GuideDocumento87 páginasControl and On-Off Valves Guidebaishakhi_b90100% (3)
- Stereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010Documento50 páginasStereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010ththaalAinda não há avaliações
- Current Developments in Lens DesignDocumento12 páginasCurrent Developments in Lens DesignMahabub HossainAinda não há avaliações
- SPP 40 Series Sponsored BE MTech Projects CollegewiseDocumento145 páginasSPP 40 Series Sponsored BE MTech Projects CollegewiseVinay KumarAinda não há avaliações
- SPW3 Manual Rev 5Documento713 páginasSPW3 Manual Rev 5JPYadavAinda não há avaliações
- !K Kanji Kaku - StrokesDocumento18 páginas!K Kanji Kaku - StrokeschingkakaAinda não há avaliações
- Panama Canal Requirements N10-2018Documento11 páginasPanama Canal Requirements N10-2018Anca Geanina100% (1)
- Mechanical Engineer Resume - Digambar BhangeDocumento3 páginasMechanical Engineer Resume - Digambar BhangeTOP DHAMAKAAinda não há avaliações
- Surface Vortices and Pressures in Suction Intakes of Vertical Axial-Flow PumpsDocumento22 páginasSurface Vortices and Pressures in Suction Intakes of Vertical Axial-Flow PumpssauroAinda não há avaliações
- PV Design WorksheetDocumento4 páginasPV Design WorksheetLarry Walker II100% (1)
- Gsxp07er Opera1tion Manual PDFDocumento94 páginasGsxp07er Opera1tion Manual PDFMohamed SaadAllahAinda não há avaliações
- FiatDocumento56 páginasFiatOmkar ParkarAinda não há avaliações
- A134 PDFDocumento4 páginasA134 PDFJarbas MoraesAinda não há avaliações
- Reaction PaperDocumento2 páginasReaction PaperRonald CostalesAinda não há avaliações
- Study of Step Up & Step Down Transformer: Experiment 9Documento3 páginasStudy of Step Up & Step Down Transformer: Experiment 9Apna VeerAinda não há avaliações
- Jotafloor SL UniversalDocumento6 páginasJotafloor SL UniversalrogandatambunanAinda não há avaliações
- Letter To Local Residents From Sutton Council Re. Lidl Development To Replace Matalan Ref DM2019-02113 10 January 2020Documento5 páginasLetter To Local Residents From Sutton Council Re. Lidl Development To Replace Matalan Ref DM2019-02113 10 January 2020etajohnAinda não há avaliações
- Piping Class Sdxp10 - 1.4410 - (2507 Superduplex SS)Documento3 páginasPiping Class Sdxp10 - 1.4410 - (2507 Superduplex SS)Lucian GrigorasAinda não há avaliações
- CAT775GDocumento32 páginasCAT775GAndy Chan100% (1)
- SI Units in Geotechnical EngineeringDocumento7 páginasSI Units in Geotechnical EngineeringfaroeldrAinda não há avaliações
- Ranking 4Documento34 páginasRanking 4Deepti BhatiaAinda não há avaliações
- Kodak 2000 Um SM SCHDocumento157 páginasKodak 2000 Um SM SCHВиталий КоптеловAinda não há avaliações