Você também pode gostar
- Integrated Renewable Energy for Rural Communities: Planning Guidelines, Technologies and ApplicationsNo EverandIntegrated Renewable Energy for Rural Communities: Planning Guidelines, Technologies and ApplicationsAinda não há avaliações
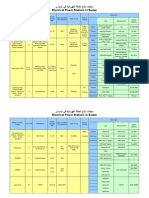
- محطات إنتاج الطاقة الكهربائية في السودانDocumento6 páginasمحطات إنتاج الطاقة الكهربائية في السودانTruuth SeekerAinda não há avaliações
- Cases in CorpDocumento179 páginasCases in CorpNoel SincoAinda não há avaliações
- Green Power International (P) LTD.: Selection Chart For Natural Gas Based GensetsDocumento1 páginaGreen Power International (P) LTD.: Selection Chart For Natural Gas Based GensetssanitermAinda não há avaliações
- Technology and Economics of Modern Biogas EnginesDocumento36 páginasTechnology and Economics of Modern Biogas EnginesnguyenbmtsvAinda não há avaliações
- ERS M22 PC4 FerryDocumento2 páginasERS M22 PC4 FerryouakgoodAinda não há avaliações
- Process Safety and Environmental Protection Volume 102 Issue 2016 (Doi 10.1016 - J.psep.2016.02.011) Agarwal, Shilpi Nekouei, Farzin Kargarzadeh, Hanieh Nekouei, - Preparation of Nickel HydroxideDocumento13 páginasProcess Safety and Environmental Protection Volume 102 Issue 2016 (Doi 10.1016 - J.psep.2016.02.011) Agarwal, Shilpi Nekouei, Farzin Kargarzadeh, Hanieh Nekouei, - Preparation of Nickel HydroxidenezarahayuAinda não há avaliações
- Four Stroke Diesel EngineDocumento9 páginasFour Stroke Diesel Engineteguh arif pratama adi putraAinda não há avaliações
- Process Safety and Environmental Protection 2009 Volume 87, Number 1Documento2 páginasProcess Safety and Environmental Protection 2009 Volume 87, Number 1jenanboyzAinda não há avaliações
- Catalogo de MotoresDocumento96 páginasCatalogo de MotoresCristian SumiAinda não há avaliações
- 355Documento1 página355taufikppnsAinda não há avaliações
- Hamworthy WartsilaRTflex96CRTA96CDocumento24 páginasHamworthy WartsilaRTflex96CRTA96CTuan Linh VoAinda não há avaliações
- Wartsila OemDocumento2 páginasWartsila OemAbid LakhaniAinda não há avaliações
- G Type EnginesDocumento16 páginasG Type Enginespavlo_790317697Ainda não há avaliações
- Check of AccumulatorsDocumento1 páginaCheck of AccumulatorsvihaanAinda não há avaliações
- Recent Development in Marine EnginesDocumento81 páginasRecent Development in Marine EnginesShashidhar ChandraiahAinda não há avaliações
- Propulsion Trends in Container VesselsDocumento28 páginasPropulsion Trends in Container VesselsFuchsbauAinda não há avaliações
- WV92Q248 01gb Instrument Air SystemDocumento8 páginasWV92Q248 01gb Instrument Air SystemwilsonAinda não há avaliações
- Comparative Table For Damage Stability Results of ASD Tug FV - 34mDocumento4 páginasComparative Table For Damage Stability Results of ASD Tug FV - 34mAMIRAinda não há avaliações
- Wartsila FuelsDocumento12 páginasWartsila FuelspimapiniAinda não há avaliações
- RT FlexDocumento3 páginasRT FlexGaby CrisAinda não há avaliações
- HIMSEN Catalog 2010Documento46 páginasHIMSEN Catalog 2010A87_navjAinda não há avaliações
- Himsen H46 60VDocumento4 páginasHimsen H46 60VairtupasAinda não há avaliações
- G60me C10 - 5 LgipDocumento594 páginasG60me C10 - 5 LgipKhải Nguyễn MinhAinda não há avaliações
- 12165-70 C25 - 33L9AY - Tier2 Operating ManualDocumento385 páginas12165-70 C25 - 33L9AY - Tier2 Operating ManualkodrysAinda não há avaliações
- c32 t3 1622 SpecificationsDocumento2 páginasc32 t3 1622 SpecificationsHabibAinda não há avaliações
- Man 32-44CRDocumento3 páginasMan 32-44CRturkertalayman1660Ainda não há avaliações
- 2011 Engine Tech Review MWMDocumento2 páginas2011 Engine Tech Review MWMGrietekeAinda não há avaliações
- 2015 Four Stroke Propulsion Engines PDFDocumento28 páginas2015 Four Stroke Propulsion Engines PDFNam Anh TrầnAinda não há avaliações
- MBH Conversion References - Deutz-MWM TBD 6M 628Documento1 páginaMBH Conversion References - Deutz-MWM TBD 6M 628Marbun Benny100% (1)
- Bukh DV 36-48 Workshop ManualDocumento196 páginasBukh DV 36-48 Workshop Manualasaturday85Ainda não há avaliações
- ABC Traction enDocumento8 páginasABC Traction enalireza1941Ainda não há avaliações
- MAN Diesel EngDocumento164 páginasMAN Diesel EngRAJESH GANESANAinda não há avaliações
- Wartsila o e W 50df PG PDFDocumento182 páginasWartsila o e W 50df PG PDFRio WawoAinda não há avaliações
- PB 753 GB 0212 ViscoSense2Documento8 páginasPB 753 GB 0212 ViscoSense2jpineda55Ainda não há avaliações
- Kta VagDocumento20 páginasKta VagHa HoangAinda não há avaliações
- SL96-341 B&W Service LetterDocumento4 páginasSL96-341 B&W Service LetterkamalAinda não há avaliações
- Technical Specification: Data & SpecificationsDocumento5 páginasTechnical Specification: Data & SpecificationsDmitryAinda não há avaliações
- 3244cr Four Stroke Diesel Engine - 3 PDFDocumento9 páginas3244cr Four Stroke Diesel Engine - 3 PDFalulgameAinda não há avaliações
- Installation and Operation Manual: Pressure Shutdown Device For The 3161 GovernorDocumento22 páginasInstallation and Operation Manual: Pressure Shutdown Device For The 3161 Governorarvatti100% (1)
- ABB Turbocharging TPS - . - D / E - The PerformerDocumento4 páginasABB Turbocharging TPS - . - D / E - The PerformerTibor AngeloAinda não há avaliações
- 14cyl For RTA96CDocumento2 páginas14cyl For RTA96Cmarko4096Ainda não há avaliações
- 2007 - ΜΑΝ - ΣΤΟΙΧΕΙΑ ΚΙΝΗΤΗΡΑDocumento14 páginas2007 - ΜΑΝ - ΣΤΟΙΧΕΙΑ ΚΙΝΗΤΗΡΑPariotis EfthimiosAinda não há avaliações
- MAN SL2017-654 - JNN (2017.11) - Crankshaft Torsional Vibration DamperDocumento1 páginaMAN SL2017-654 - JNN (2017.11) - Crankshaft Torsional Vibration DamperGrandpa100% (1)
- Man Diesel - Sl2013-571Documento17 páginasMan Diesel - Sl2013-571stopless_dalian685Ainda não há avaliações
- S70me CDocumento9 páginasS70me CchrisAinda não há avaliações
- Marine Engine Program 2014 PDFDocumento164 páginasMarine Engine Program 2014 PDFAlbertoJim90Ainda não há avaliações
- Faraz Ahmed C.VDocumento3 páginasFaraz Ahmed C.Vfaraz24Ainda não há avaliações
- Low Sac NozzleDocumento2 páginasLow Sac NozzleNguyễn Đình ĐứcAinda não há avaliações
- tr0199990210510 - en Oil GDocumento26 páginastr0199990210510 - en Oil GSojib hossainAinda não há avaliações
- ABC Corp. Datasheet Dual Fuel enDocumento4 páginasABC Corp. Datasheet Dual Fuel enMartin KratkyAinda não há avaliações
- TopWin7 Manual EnglishDocumento49 páginasTopWin7 Manual EnglishMustafa HasanAinda não há avaliações
- B33 - 102 - dd2015 - 07 - 15 - Ed006 - EN - Start - Up - of - Engine - OKDocumento21 páginasB33 - 102 - dd2015 - 07 - 15 - Ed006 - EN - Start - Up - of - Engine - OKCristian Ferchiu100% (1)
- Operating Experience With Modern High Speed Diesel Engine in Ship Assist Tugs and Related Requirements For Future Engine DevelopmentDocumento18 páginasOperating Experience With Modern High Speed Diesel Engine in Ship Assist Tugs and Related Requirements For Future Engine DevelopmentYao WeiAinda não há avaliações
- Pac12 JB SM Paper 25-Nov-11Documento11 páginasPac12 JB SM Paper 25-Nov-11BuckinghamsterAinda não há avaliações
- Propulsion of Offshore Support VesselsDocumento8 páginasPropulsion of Offshore Support VesselsPatrick Araujo RamalhoAinda não há avaliações
- Propulsion of 46000 50000 DWT Handymax TankerDocumento20 páginasPropulsion of 46000 50000 DWT Handymax TankerFuchsbauAinda não há avaliações
- Multi-Engine Submarine Power SuppliesDocumento14 páginasMulti-Engine Submarine Power Suppliesdavid2404100% (2)
- High Speed Solutions For Harbor and Terminal TugboatsDocumento8 páginasHigh Speed Solutions For Harbor and Terminal TugboatsfernandoAinda não há avaliações
- Electric Warship IDocumento17 páginasElectric Warship IEduarda BusnardoAinda não há avaliações
- MAX22530 Isolated ADCDocumento37 páginasMAX22530 Isolated ADCRoy ChaiAinda não há avaliações
- MAX22199 Octal Digital InputDocumento37 páginasMAX22199 Octal Digital InputRoy ChaiAinda não há avaliações
- Et200sp Ai 2xu I 2 4 Wire HF Manual en-US en-USDocumento55 páginasEt200sp Ai 2xu I 2 4 Wire HF Manual en-US en-USRoy ChaiAinda não há avaliações
- Espresso Coffee PDFDocumento7 páginasEspresso Coffee PDFRoy ChaiAinda não há avaliações
- Greencrete CatalogDocumento24 páginasGreencrete CatalogRoy ChaiAinda não há avaliações
- Bussmann HSDI DatasheetDocumento9 páginasBussmann HSDI DatasheetRoy ChaiAinda não há avaliações
- Pid Temp Doku v1 0 enDocumento40 páginasPid Temp Doku v1 0 enRoy ChaiAinda não há avaliações
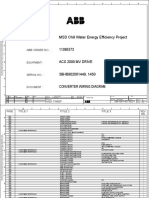
- 3BHS814079E01 Wiring Diagram R4Documento52 páginas3BHS814079E01 Wiring Diagram R4Roy ChaiAinda não há avaliações
- B24 Power Meter RegistersDocumento27 páginasB24 Power Meter RegistersRoy ChaiAinda não há avaliações
- ABB 800xa FP4 Upgrade InstructionsDocumento1 páginaABB 800xa FP4 Upgrade InstructionsRoy ChaiAinda não há avaliações
- Terminology OnboardDocumento3 páginasTerminology OnboardDavid TurnerAinda não há avaliações
- Rotation Number 13 June 2023Documento31 páginasRotation Number 13 June 2023JACKAinda não há avaliações
- Grain AMSA FormDocumento4 páginasGrain AMSA FormHobbyLogic67% (6)
- Oral Notes RUPESH PILLAIDocumento179 páginasOral Notes RUPESH PILLAIMariyath Muraleedharan KiranAinda não há avaliações
- Vospers Water Sport 1962 Magazine ArticleDocumento12 páginasVospers Water Sport 1962 Magazine Articlecockybundoo100% (1)
- Armada Warlords Fleet BuilderDocumento3 páginasArmada Warlords Fleet BuilderLucas GamboneAinda não há avaliações
- Enns-Class: Schiffswerft LinzDocumento2 páginasEnns-Class: Schiffswerft LinzJerome BrusasAinda não há avaliações
- Battle of TsushimaDocumento52 páginasBattle of Tsushimaaravindabd7Ainda não há avaliações
- The Wreck of The Edmund Fitzgerald 40 Years AgoDocumento6 páginasThe Wreck of The Edmund Fitzgerald 40 Years AgoThavam RatnaAinda não há avaliações
- Ektank T28 18600 DWTDocumento2 páginasEktank T28 18600 DWTJuan Cruz TauterysAinda não há avaliações
- AMIGA - Advanced Destroyer Simulator ManualDocumento5 páginasAMIGA - Advanced Destroyer Simulator ManualjajagaborAinda não há avaliações
- Ardis Ii - de CesariDocumento8 páginasArdis Ii - de CesariNeven SandicAinda não há avaliações
- Tug Boat GT / NT YearDocumento7 páginasTug Boat GT / NT YearEndar GunawanAinda não há avaliações
- Comparative Analysis For Monohull, Catamaran, and Trimaran of Hull Fishing VesselDocumento9 páginasComparative Analysis For Monohull, Catamaran, and Trimaran of Hull Fishing VesselRizki IspramuditaAinda não há avaliações
- Hobie Parts Accessories PricelistDocumento9 páginasHobie Parts Accessories Pricelistdanut_docAinda não há avaliações
- K - Commercial Shipbuilding Industry PDFDocumento37 páginasK - Commercial Shipbuilding Industry PDFGökhan KaramanAinda não há avaliações
- Mobile Offshore Drilling Units 2001: Rules For Building and ClassingDocumento46 páginasMobile Offshore Drilling Units 2001: Rules For Building and ClassingEsapermana RiyanAinda não há avaliações
- Vega HandbookDocumento36 páginasVega Handbook77boat776956Ainda não há avaliações
- Kiki's New CV Candidate For CrewingDocumento6 páginasKiki's New CV Candidate For CrewingalberioAinda não há avaliações
- Baltic Questionnaire - Taizhou Pioneer - 2021Documento10 páginasBaltic Questionnaire - Taizhou Pioneer - 2021S. Kumar JagannathAinda não há avaliações
- Oyster BrochureDocumento27 páginasOyster BrochurevanyaddsAinda não há avaliações
- World Navies Today - Other American NaviesDocumento14 páginasWorld Navies Today - Other American Naviesjb2ookworm0% (1)
- Mechanical EngineeringDocumento42 páginasMechanical EngineeringNagendra NaiduAinda não há avaliações
- Imo StandardDocumento8 páginasImo StandardYoga SeptianAinda não há avaliações
- Bunker Request Form - TB BS 22Documento1 páginaBunker Request Form - TB BS 22herlambangAinda não há avaliações
- Curiculum Vitae: Personal DataDocumento1 páginaCuriculum Vitae: Personal DataFazal PaymentAinda não há avaliações
- MV SSI BRIALLIANT Final Report - November 2023Documento23 páginasMV SSI BRIALLIANT Final Report - November 2023DanielAinda não há avaliações
- Question Paper B FullDocumento10 páginasQuestion Paper B FullShoaib AhmedAinda não há avaliações
- Specification: Company I Street I CityDocumento3 páginasSpecification: Company I Street I CityOzan SancakAinda não há avaliações
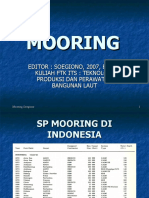
- MooringDocumento151 páginasMooringHafizh AmazonAinda não há avaliações