Escolar Documentos
Profissional Documentos
Cultura Documentos
Evaluation and DSP Based Implementation of PWM Approaches For Sin
Enviado por
Phạm Văn TưởngDescrição original:
Título original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Evaluation and DSP Based Implementation of PWM Approaches For Sin
Enviado por
Phạm Văn TưởngDireitos autorais:
Formatos disponíveis
Te Florida State University
DigiNole Commons
Electronic Teses, Treatises and Dissertations Te Graduate School
4-1-2005
Evaluation and DSP Based Implementation of
PWM Approaches for Single-Phase DC-AC
Converters
Lining Zhou
Florida State University
Follow this and additional works at: htp://diginole.lib.fsu.edu/etd
Tis Tesis - Open Access is brought to you for free and open access by the Te Graduate School at DigiNole Commons. It has been accepted for
inclusion in Electronic Teses, Treatises and Dissertations by an authorized administrator of DigiNole Commons. For more information, please contact
lib-ir@fsu.edu.
Recommended Citation
Zhou, Lining, "Evaluation and DSP Based Implementation of PWM Approaches for Single-Phase DC-AC Converters" (2005).
Electronic Teses, Treatises and Dissertations. Paper 519.
THE FLORIDA STATE UNIVERSITY
FAMU-FSU COLLEGE OF ENGINEERING
EVALUATION AND DSP BASED IMPLEMENTATION OF PWM APPROACHES
FOR SINGLE-PHASE DC-AC CONVERTERS
By
LINING ZHOU
A Thesis submitted to the
Department of Electrical and Computer Engineering
in partial fulfillment of the
requirements for the degree of
Master of Science
Degree Awarded:
Spring Semester, 2005
The members of the Committee approve the thesis of Lining Zhou defended on
04/01/2005.
_____________________
Jie J. Chang
Professor Directing Thesis
_____________________
Jim P. Zheng
Committee Member
_____________________
Rodney G. Roberts
Committee Member
Approved:
______________________________________________________________
L. J. Tung, Interim Chair, Department of Electrical and Computer Engineering
______________________________________________________________
C. J. Chen, Dean, College of Engineering
The Office of Graduate Studies has verified and approved the above named committee
members.
ii
This manuscript is dedicated to my parents, my grandparents and my love, Tracy!
iii
ACKNOWLEDGMENTS
I would like to thank my academic advisor, Dr. Jie Chang for his guidance and
encouragement throughout my graduate program, and my committee members, Dr. Jim
Zheng and Dr. Rodney Roberts, for their valuable advice and guidance. I would also like
to thank the academic and administrative staff in the Department of Electrical and
Computer Engineering and the Center for Advanced Power Systems (CAPS). Most
importantly, I would like to thank my family and friends for their support throughout my
graduate school experience.
iv
TABLE OF CONTENTS
LIST OF ACRONYMS . vii
LIST OF FIGURES ix
LIST OF TABLES . xii
ABSTRACT .. xiii
CHAPTER 1: INTRODUCTION
1.1 System Background .. 1
1.2 Single-phase DC-AC Converter ... 2
1.3 Pulse Width Modulation (PWM) .. 3
1.4 Material Organization ... 5
CHAPTER 2: OPEN-LOOP PWM SWITCHING SCHEMES
2.1 Introduction ... 6
2.2 Bipolar PWM Modulation Approach 6
2.3 Unipolar PWM Modulation Approach . 7
2.4 Modified Unipolar PWM Modulation Approach . 9
CHAPTER 3: PWM HARMONIC ANALYSIS
3.1 General Discussion .. 11
3.1.1 Fourier Series Analysis ... 11
3.1.2 Total Harmonic Distortion ...12
3.1.3 Electromagnetic Interference (EMI) ... 13
3.2 Harmonic Analysis of Bipolar Modulation . 14
v
3.2.1 Bipolar PWM Parameters Consideration 14
3.2.2 Bipolar PWM Switching Vector . 15
3.2.3 Bipolar PWM Spectrum Analysis ... 17
3.3 Harmonic Analysis of Unipolar Modulation .. 18
3.3.1 Unipolar PWM Parameters Consideration . 18
3.3.2 Unipolar PWM Switching Vector ...19
3.3.3 Unipolar PWM Spectrum Analysis 21
3.4 Harmonic Analysis of Modified Unipolar Modulation ... 22
3.4.1 Modified Unipolar PWM Parameters Consideration .. 22
3.4.2 Modified Unipolar PWM Switching Vectors . 23
3.4.3 Modified Unipolar PWM Spectrum Analysis .... 25
3.5 Comparison .. 26
CHAPTER 4: DIGITAL SIMULATION AND EVALUATION OF PWM
SCHEMES
4.1 Introduction .. 29
4.2 PSpice Simulation for Bipolar Case 32
4.2.1 Simulation Circuit Topology .. 32
4.2.2 Simulation Results for Bipolar Case ... 33
4.3 PSpice Simulation for Unipolar Case .. 37
4.3.1 Simulation Circuit Topology .. 37
4.3.2 Simulation Results for Unipolar Case 38
4.4 PSpice Simulation for Modified Unipolar Case .. 41
4.4.1 Simulation Circuit Topology .. 41
4.4.2 Simulation Results for Modified Unipolar Case . 42
vi
4.5 Conclusion on Software Simulation 45
CHAPTER 5: SYSTEM IMPLEMENTATION BASED ON A DSP
5.1 Hardware Configuration .. 47
5.1.1 DSP Board Configuration ... 47
5.1.2 Prototype DC-AC Converter .. 49
5.1.3 LC Filter and Load .. 50
5.1.4 Whole Experimental System Setup 51
5.2 Circuit Interface ... 52
5.3 Program Design of PWM Control ... 52
5.4 Experimental Results ... 55
5.4.1 Bipolar PWM Scheme 55
5.4.2 Unipolar PWM Scheme .. 58
5.4.3 Modified Unipolar PWM Scheme .. 61
CHAPTER 6: CONCLUSIONS
6.1 Conclusion ... 65
6.2 Future Research Works 65
APPENDIX A: CLOSED-LOOP CONTROL SYSTEM SIMULATION 67
APPENDIX B: KEY FEATURES OF DSP BOARD . 71
REFERENCES ... 73
BIOGRAPHICAL SKETCH .... 76
vii
LIST OF ACRONYMS
CAD: Computer Aided Design
CISPR: International Special Committee on Radio Interference
CSI: Current Source Inverter
DSP: Digital Signal Processing
EMI: Electrical Magnetic Interference
EV: Event Manager
FCC: Federal Communications Commission
GTO: Gate Turn Off Thyristor
IEC: International Electro-technical Commission
IGBT: Insulated Gate Bipolar Transistor
ISR: Interrupt Service Routine
MCT: MOS Controlled Thyristor
PI: Proportional-plus-Integral
PWM: Pulse Width Modulation
THD: Total Harmonics Distortion
VSI: Voltage Source Inverter
viii
LIST OF FIGURES
1.1 Block diagram of power electronics system 2
1.2 Single-phase full bridge inverter .. 3
1.3 Description of PWM modulation . 4
2.1 Bipolar PWM scheme and output .... 7
2.2 Unipolar PWM scheme and output .. 8
2.3 Modified unipolar PWM scheme and output ... 9
3.1 Common mode EMI noise in single-phase PWM inverter 14
3.2 Bipolar PWM switching pattern 17
3.3 Frequency spectrum for bipolar PWM .. 18
3.4 Unipolar PWM switching pattern .. 21
3.5 Frequency spectrum for unipolar PWM 22
3.6 Modified unipolar PWM switching pattern ... 24
3.7 Frequency spectrum for unipolar PWM .... 25
4.1 PSpice simulation flowchart .. 30
4.2 Magnitude bode plot for second-order LC filter .....31
4.3 PSpice circuit topology for bipolar scheme ... 33
4.4 Bipolar PWM input and PWM control waveform . 34
4.5 Bipolar PWM output waveform and Fourier analysis ... 35
4.6 Bipolar PWM inductor current and load output waveform ... 35
4.7 Bipolar PWM output waveform and Fourier analysis (400Hz) . 36
4.8 Bipolar PWM inductor current and load output waveform (400Hz) . 36
4.9 PSpice circuit topology for unipolar scheme . 37
4.10 Unipolar PWM input and PWM control waveform ..... 38
4.11 Unipolar PWM output waveform and Fourier analysis ... 39
4.12 Unipolar PWM inductor current and load output waveform ... 39
4.13 Unipolar PWM output waveform and Fourier analysis (400Hz) . 40
4.14 Unipolar PWM inductor current and load output waveform (400Hz) . 40
4.15 PSpice circuit topology for modified unipolar scheme 41
4.16 Modified unipolar PWM input and PWM control waveform .. 42
ix
4.17 Modified unipolar PWM output waveform and Fourier analysis 43
4.18 Modified unipolar PWM inductor current and load output waveform 43
4.19 Modified unipolar PWM output and Fourier analysis (400Hz) ... 44
4.20 Modified unipolar PWM inductor current and load output (400Hz) ... 44
4.21 Line-to-ground voltage for three PWM schemes . 46
5.1 Block diagram of eZdsp
TM
F2812 ..... 48
5.2 Utilized EVA function block diagram 48
5.3 eZdsp
TM
F2812 DSP board 49
5.4 A picture of prototype DC-AC converter ... 49
5.5 Typical connection of IR2181 50
5.6 LC filter & load configuration ... 51
5.7 Experiment system setup ... 51
5.8 General experiment circuit interface .. 53
5.9 Program flowchart . 54
5.10 DSP control output for bipolar . 56
5.11 Frequency spectrum of H-bridge output for bipolar PWM .. 56
5.12 Load voltage and current for bipolar ... 56
5.13 Load voltage spectrum for bipolar ... 56
5.14 DSP control output for bipolar (400 Hz) . 57
5.15 Frequency spectrum of H-bridge output for bipolar (400Hz) . 57
5.16 Load voltage and current for bipolar (400 Hz) 57
5.17 Load voltage spectrum for bipolar (400 Hz) 58
5.18 DSP control output for unipolar ... 58
5.19 Frequency spectrum of H-bridge output for unipolar PWM ... 59
5.20 Load voltage and current for unipolar . 59
5.21 Load voltage spectrum for unipolar . 59
5.22 DSP control output for unipolar (400 Hz) ... 60
5.23 Frequency spectrum of H-bridge output for unipolar (400Hz) 60
5.24 Load voltage and current for unipolar (400 Hz) .. 60
5.25 Load voltage spectrum for unipolar (400 Hz) .. 61
5.26 DSP control output for modified unipolar ... 61
x
5.27 Spectrum of H-bridge output for modified unipolar PWM . 62
5.28 Load voltage and current for modified unipolar .. 62
5.29 Load voltage spectrum for modified unipolar . 62
5.30 DSP control output for modified unipolar (400 Hz) 63
5.31 Spectrum of H-bridge output for modified unipolar (400Hz) 63
5.32 Load voltage and current for modified unipolar (400 Hz) ... 63
5.33 Load voltage spectrum for modified unipolar (400 Hz) .. 64
A.1 Dual-loop control scheme for single-phase inverter . 68
A.2 MATLAB Simulink simulation model .. 69
A.3 Step response of closed loop control scheme 69
B.1 eZdsp
TM
F2812 connector positions .. 71
xi
LIST OF TABLES
3.1 Symmetry in Fourier series analysis ...... 12
3.2 Switching vector of Bipolar PWM 16
3.3 Switching vector of Unipolar PWM .. 20
3.4 Switching vector of modified unipolar PWM 23
3.5 Brief comparisons of the three PWM schemes .. 27
4.1 Parameters change between Chapter 3 and Chapter 4 & 5 .... 29
4.2 Components selection for Pspice simulation . 32
4.3 LC selections for 60Hz and 400Hz output frequency 32
4.4 Overall performances for three PWM schemes . 45
B.1 eZdsp
TM
F2812 Connector functions 72
B.2 P8 connector Pin allocation ... 72
xii
ABSTRACT
Switching-mode single-phase DC-AC converters have been widely used in
critical applications such as uninterrupted power supply systems and AC motor drivers.
Among various control techniques, Pulse Width Modulation (PWM) technique is the
most effective one that is commonly used to regulate the magnitude and frequency of the
converters output voltage. With recent revolution in the Digital Signal Processing (DSP)
technology, the trend of converter control is moving to DSP based real-time digital
control system. Digital control has the advantage of low cost with increased flexibility
and accuracy. In this thesis, three open-loop PWM control schemes are evaluated and
compared in both time domain and frequency domain. Theoretical analysis and spectrum
evaluation have been completed. Digital simulation is conducted for each of the control
schemes to verify the theoretical analysis. Experimental implementation based on a
TMS320F2812 DSP is presented and finally system experimental results are
demonstrated.
xiii
CHAPTER 1
INTRODUCTION
1.1 System Background
With the advent of the power semiconductor device from 1950s, power
electronics area is growing extensively in industrial, transportation, residential,
commercial and aerospace applications [1-3]. Power electronics mainly deals with the
efficient conversion, control and conditioning of electrical power by static means from its
available input form into a desired electrical output form [4-5]. The electrical power
conversion can be realized by power converters built on power semiconductor switching
devices and the converters are controlled by control electronics. This kind of power
converter is usually known as switching-mode converter. Figure 1.1 shows a power
electronic system block diagram. The power semiconductor devices can be considered as
controllable ideal switches that can turn on and off according to the corresponding gate
signal. Popular power devices include Gate-turn-off thyristor (GTO), Insulated-gate-
bipolar transistor (IGBT) and MOS-controlled thyristor (MCT). Nowadays, with the
increased power capabilities and ease of control of these modern semiconductor devices,
great leap has been seen in new power converter topologies and controls. Based on the
power form on the input and output side, the power converters can be divided into the
following categories:
1. DC to AC (inverter)
2. AC to DC (rectifier)
3. DC to DC (chopper)
4. AC to AC (matrix converter or cycloconverter [7])
In recent years, the rapid growth of the Digital Signal Processors makes it
possible to significantly improve the real-time control capability of the switching-mode
power converters [8]. The power converters are typically a complex combination of
linear, non-linear and high frequency switching elements. The controller demands a high-
1
speed of control and data processing to achieve high dynamic bandwidth. The latest
digital signal processors capability can sufficiently meet the control and data processing
requirement imposed by such system and make the real-time digital control of power
electronic system realizable and affordable.
Power Converter
Electronic or DSP
Controller
LOAD
Control
reference
Feedback
signals
Power input Power output
Control
signals
Figure 1.1 Block diagram of power electronics system
1.2 Single-phase DC-AC Converter
In such practical applications as AC power supplies the object is to generate a
sinusoidal AC output with the desired magnitude and frequency. The switching-mode DC
to AC power converter (also known as inverter) is commonly used in this kind of
applications in which the power flows from the DC side to the AC load side [6]. If the
input to the inverter is a DC voltage source, it is referred to as voltage source inverter
(VSI). Similarly, if the input is a DC current source, the inverter is called current source
inverter (CSI). The CSI is not commonly used except for very high power applications,
so we will not discuss it here in detail.
The VSI can be further divided into single-phase inverter and three-phase inverter.
Single-phase inverter is required to supply single-phase AC load with a high power
quality or less harmonic distortion [9]. Figure 1.2 below shows the most popular four-
switch full bridge single-phase inverter topology:
2
+
_
V
d
T
1
T
2
T
3
T
4
+
_
+
_
+
_
V
out
A
B
1/2 V
d
1/2 V
d
Figure 1.2 Single-phase full bridge inverter
As shown in Figure 1.2, the inverter consists of two legs (A, B) and supplies a
single-phase AC output voltage V
out
to the load. Two equal value capacitors are
connected in series across the input DC side and their junction can be connected to
ground. This ensures a voltage of
2
1
V
d
across each capacitor. A certain switching
algorithm can be applied to each of the four switch modules T
1
, T
2
, T
3
, and T
4
in order
to control the inverter to generate desired sinusoidal output with desired frequency and
magnitude. Among the practical switching schemes, Pulse Width Modulation (PWM) is
classical and most widely used. It will be discussed in details in the following sections.
1.3 Pulse Width Modulation (PWM)
Pulse width modulation (PWM) techniques are effective means to control the
output voltage frequency and magnitude. It has been the subject of intensive research
during the last few decades. Various PWM control schemes have been discussed in
literature. Basically they can be classified into two main categories, one is carrier based
PWM and the other is space-vector PWM [10,11]. Especially, the space-vector PWM is
used for three-phase converter applications. Here we mainly consider the carrier based
PWM approaches that are often applied to the single-phase applications.
3
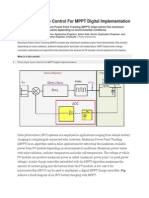
Figure 1.3 Description of PWM modulation
Figure 1.3 above is a general scheme of PWM modulation. In order to produce a
sinusoidal voltage at desired frequency, say , a sinusoidal control signal V
1
f
control
at the
desired frequency ( ) is compared with a triangular waveform V
1
f
carrier
as shown in
Figure1.3 (a), at each compare match point, a transition in PWM waveform is generated
as shown in Figure 1.3 (b). When V
control
is greater than V
carrier
, the PWM output is
positive and When V
control
is smaller than V
carrier
, the PWM waveform is negative. The
frequency of triangle waveform V
carrier
establishes the inverters switching
frequency, . We define the modulation index as:
S
f
i
m
tri
control
i
V
V
m =
(1.1)
Where V
control
is the peak amplitude of the control signal, while V
tri
is the peak
amplitude of the triangle signal (carrier). Also the frequency modulation ratio is defined
as:
1
f
f
m
s
f
=
(1.2)
4
f
m is the ratio between the carrier and control frequency. The fundamental component
(V
out
)
1
of the H bridge output voltage V
out
has the property as depicted in equation
below in a linear modulation region:
0 . 1 ) (
1
^
=
i d i
out m V m V (1.3)
This equation shows an interesting result that the amplitude of the fundamental
component of the output voltage varies linearly with the modulation index. The value
from zero to one is defined as the linear control range of sinusoidal carrier PWM.
i
m
1.4 Material Organization
In this thesis, the background information is presented in Chapter 1. Chapter 2
will introduce three different PWM switching schemes that will be analyzed and
evaluated in later chapters. Mathematic harmonic analysis of the three PWM approaches
will be given in Chapter 3. Digital simulation and evaluation of the open-loop systems
based on each PWM approach will be presented in Chapter 4. This also prepare for
further hardware experimental work. In Chapter 5, hardware implementation of the open
loop PWM switching schemes based on TMS320F2812 DSP processor will be detailed.
Chapter 6 gives conclusions and a prospective to the future research works in this area.
Also in appendix, dual-loop PID closed loop control of single-phase PWM inverter will
be briefly discussed and simulated by MATLAB-Simulink.
5
CHAPTER 2
OPEN-LOOP PWM SWITCHING SCHEMES
2.1 Introduction
In Chapter 1 the basic concept of DC-AC power converter and PWM modulation
is discussed. In single-phase applications, what we are especially interested in is the
output voltage V
out
that supplies to the load. As we can see in Figure 1.2, V
out
is the
voltage difference between the mid-point of H-bridge inverter leg A and B. As a result,
both PWM patterns at two H-bridge legs, A and B need to be considered and arranged to
generate the desired output with lower total harmonic distortion (THD). Beside the THD,
proper positioning of the output voltage harmonic spectrum is another task for the PWM
switching scheme design. In this case, the low order harmonics are especially undesired
because the low order harmonics result in bulky and expensive LC filter.
2.2 Bipolar PWM Modulation Approach
Bipolar PWM switching is a classical switching scheme for single-phase inverter.
The switch pairs (T
1
, T
4
) and (T
2
, T
3
) in Figure 1.2 on the different legs are switched on
and off simultaneously. This results a bipolar voltage output V
out
because there is no zero
output voltage state exists. The output waveform is the same as the point voltage V in
Figure 1.2 but the amplitude doubles. The principle of bipolar PWM can be summarized
in equation 2.1:
AO
carrier control d out
carrier control d out
V V When V V
V V When V V
< =
> =
(2.1)
6
Figure 2.1 Bipolar PWM scheme and output
Figure 2.1 gives a demonstration of bipolar modulation approach with parameters
=0.8 and =15. From the figure we know that V is exactly the reverse of V at
any time, so there is no zero state in the output voltage V
i
m
f
m
BO AO
BO AO out
V V = , which makes
output signal bipolar. In this bipolar PWM modulation scheme, if the frequency
modulation ratio is selected to be odd, the output waveform V
out
will be odd and half-
wave symmetry with origin. This results a disappearance of all the even harmonics in
V
out
.
2.3 Unipolar PWM Modulation Approach
In a unipolar PWM modulation, the switch pairs (T
1
, T
4
) and (T
2
, T
3
) in inverter
H-bridge are not switched simultaneously as in the bipolar approach. Instead, the leg A
7
and B in Figure 1.2 are controlled independently by the comparison of two control
signals V
control1
and V
control2
with the same carrier signal. Figure 2.2 illustrates the
unipolar PWM switching scheme and output voltage at =0.8 and =12.
i
m
f
m
Figure 2.2 Unipolar PWM scheme and output
The switching algorithm of unipolar PWM is given in equation 2.2 below:
. 4 , 2 3 , 1 0
. 3 , 2
. 4 , 1
on is T T or T T When V
on is T T When V V
on is T T When V V
out
d out
d out
=
=
=
(2.2)
From the above Figure 2.2 and equation (2.2), it is quite clear that the output
voltage changes between 0 and +V
d
or between 0 and - V
d
in each half fundamental
period, so this PWM scheme is called unipolar PWM. The voltage change at each
switching transition is V
d
in comparison with the 2V
d
voltage change in bipolar PWM
approach. Also in this PWM approach, it is possible to choose the frequency modulation
8
ratio as even number to cancel the harmonic components at the switching frequency
( ). Detailed discussion about the parameter selection and simulation results will be
demonstrated in Chapter 3.
f
m
S
f
2.4 Modified Unipolar PWM Approach
0
-Vd/2
Vd/2
-Vd/2
Vd/2
-Vd
0
Vd
t
t
t
t
VAo
VBo
Vout
(a)
(b)
(c)
(d)
Figure 2.3 Modified unipolar PWM scheme and output
A modified unipolar PWM approach, which is quite different from the traditional
bipolar or unipolar PWM schemes, is presented in this section. The two legs in the H-
Bridge of the single-phase inverter are switched at different frequencies: leg A is switched
at the fundamental frequency while leg B is switched at the carrier frequency ,
which is much higher than . This PWM switching scheme establishes an unbalanced
switching speed between two legs of the inverter. It also generates a unipolar output
voltage that changes between 0 and +V
1
f
S
f
1
f
d
or between 0 and -V
d
. Figure 2.3 is a
demonstration of this modified unipolar PWM approach with parameters =0.8 and
i
m
9
f
m =15. To obtain odd and half-wave symmetry of the output voltage to suppress the
even number harmonics, the frequency modulation ratio should be chosen as an odd
integer in this PWM approach. The modified unipolar approach has the advantage of
reducing high frequency electrical magnetic interference (EMI) [12,13]. As shown in
Figure 2.3, unlike the previous two PWM approaches, the modulation signal V
control
in
this modified unipolar PWM approach is a discontinuous signal. Detailed Fourier
spectrum analysis and discussion of this method will be presented in Chapter 3.
10
CHAPTER 3
PWM HARMONIC ANALYSIS
In Chapter 2 three PWM switching schemes are introduced, the brief description
of switching algorithm and patterns of each scheme are also illustrated. In this chapter,
detailed theoretical analysis of mathematic background and harmonic spectrum analysis
of three PWM switching schemes will be presented. The harmonic analysis is based on
the Fourier series equation and its derivations. MATLAB will be used for harmonic
spectrum simulation based on mathematic analysis.
3.1 General Discussion
3.1.1 Fourier Series Analysis
The Fourier series method is the most practical way to analyze the frequency
harmonics of inverter output voltage. The output voltage is to be expressed into Fourier
series with fundamental frequency and its harmonics. As a result, the magnitude and
phase of each frequency component could be easily obtained. The Fourier series for a
periodical signal can be represented as equation:
... sin cos ... 2 sin 2 cos sin cos
2
) (
2 2 1 1
0
+ + + + + + + + = t n b t n a t b t a t b t a
a
t f
n n
(3.1)
Where ) ( t f is a periodical signal with 2 period, can be calculated by:
n n
b a ,
K 2 , 1 , 0 ; ) cos( ) (
1
2
0
= =
n t d t n t f a
n
(3.2)
K , 2 , 1 ; ) sin( ) (
1
2
0
= =
n t d t n t f b
n
(3.3)
The magnitude of each harmonic of the fundamental frequency C can be derived
as:
n
11
K , 2 , 1 ;
;
2
2 2
0
0
= + =
=
n b a C
a
C
n n n
(3.4)
In addition to the above basic Fourier series analysis, the specific symmetry
properties of the PWM waveform can be utilized to simplify the calculation and
evaluation of PWM switching schemes. Table 3.1 below summarizes the properties of
odd and half-wave signals. This table shows that the symmetric waveform (e.g. odd and
half-wave) has the special property that certain Fourier coefficients are zeros. As a result,
symmetric PWM output waveform is preferred to eliminate undesired harmonics and to
obtain low total harmonics distortion (THD) in output waveform.
Table 3.1 Symmetry in Fourier series analysis
Symmetry Representation Properties
Odd
) ( ) ( t f t f =
; ) sin( ) (
2
; 0
0
=
=
t d t n t f b
a
n
n
Half-wave
)
2
1
( ) ( T t f t f + =
=
=
=
0
0
; ) sin( ) (
2
; ) cos( ) (
2
; 0
n odd for t d t n t f b
n odd for t d t n t f a
n even for C
n
n
n
3.1.2 Total Harmonic Distortion
Total harmonic distortion (THD) is a popular indicator to the quality of output
voltage or current. THD describes the amount of the distortion in an output waveform
V
o
(t) by the following equation:
% 100
) (
) ( ) (
) (
) (
1
2 2
3
2
2
2
0
1
2
1
2
1
2
2
+ + + +
=
= =
C
C C C C
V
V V
V
V
THD
n
rms
rms rms
rms
rms n
K
(3.5)
12
Where is the rms value of the ns harmonic of V
rms n
V ) (
o
(t), while ( is the rms
value of the fundamental frequency component. To reduce undesired harmonics in the
inverter output, a low THD value is desirable in PWM modulation. By using Fourier
series, the determination of THD of a certain output is easy to obtain because magnitude
of each harmonics ( ) can be calculated.
rms
V )
1
n
C
3.1.3 Electromagnetic Interference (EMI)
Abrupt voltage changes (high dt dV ) always exist in power electronic
equipments. High frequency Electromagnetic Interference (EMI) noise is generated in the
form of conducted noise and radiated noise [5]. Those noises can possibly affect the
proper operation of nearby electric equipment by electromagnetic interference. As we
discussed before, the PWM switching-mode power converter inherently generates rapid
voltage changes during PWM modulation, thus making PWM power inverter an
inevitable EMI noise source. Nowadays, many countries strictly limit the EMI emission
under various regulations like Federal Communications Commission (FCC), International
Special Committee on Radio Interference (CISPR) and International Electro-technical
Commission (IEC). Also in recent years, the switching frequency of power converter is
increasing with the later development on high frequency power semiconductor devices.
As a result, the reduction of EMI will also be a major concern in PWM inverter design.
The radiated EMI noise, which is several orders lower than conducted EMI, is in a form
of electromagnetic radiation and can be effectively reduced by holding the noise-source
equipment in metal cabinets.
In single-phase inverter design, special interests are focused on the common mode
conducted EMI. The common-mode noise means the current or voltage measured
between power lines and ground. In terms our single-phase PWM power inverter
topology, the common mode EMI noise happens at place showed in Figure 3.1
below. The figure shows that when there is abrupt voltage difference (
cm
I
dt dV ) between
power line (leg B) and ground, high frequency common mode EMI current will
occur through stray (parasitic) capacitors between power line and ground. Stray capacitor
cm
I
13
always exists between equipments and grounded cabinets. The frequency of common
mode EMI noise equals to the abrupt voltage transition frequency on the output power
line in respect of ground point, thus a high voltage transition frequency will cause high
frequency EMI noise.
+
_
+
_
+
_
B Line
A
B
stray
capacitor
LC filter
ground
Icm
A Line
V
d
T
1
T
3
T
4
T
2
stray
capacitor
Figure 3.1 Common mode EMI noise in single-phase PWM inverter
Many EMI reduction methods are used to suppress the EMI, including passive
and active EMI filters, EMI shielding, and by minimize stray capacitance [14-16]. In this
thesis, we will examine the EMI effect introduced by different PWM modulation
approaches.
3.2 Harmonic Analysis of Bipolar Modulation
3.2.1 Bipolar PWM Parameters Consideration
As described in the previous chapter, bipolar PWM modulation approach has one
reference signal V and it simultaneously generates two gating patterns V and V .
These two gating signals are in reverse logic relation, thus resulting in a bipolar output
. From Chapter 2 we learn that the output voltage between the two H-Bridge legs V
is:
control AO BO
out out
V
BO AO AB out
V V V V = =
(3.6)
14
V
out
has a bipolar waveform ranging from +V
d
to -V
d
with the same fundamental period
(frequency) as the desired sinusoidal AC output. V
out
can be expressed into Fourier series
using the fundamental frequency and its high frequency harmonics.
1
f
From Figure 2.1 in Chapter 2, we can see that when frequency modulation is
odd, the output waveform V
f
m
out
will be odd and half-wave symmetry. As learned from
Table 3.1, the odd and half-wave symmetry will eliminate all even harmonics. As a result,
in bipolar PWM modulation approach, the frequency modulation ratio m should be
chosen as an odd integer to ensure the output bipolar PWM waveform having less
harmonic distortion and low THD. For comparison purpose of the three PWM
modulation approaches in latter part of this thesis, an equivalent value of the switching
frequency will be set for each PWM scheme. This equivalent value may not be exactly
the same because of a different definition of the frequency modulation ratio m for each
PWM approach. However it will be generally comparable over the whole range of
harmonics from 1 to 100. In bipolar PWM approach, the output waveform switching
frequency is equal to:
f
f
1
) ( f m f
f bipolar switching
= (3.7)
For example, if is given as 60 Hz, will be chosen to be 45 to obtain an
f
1
f
f
m
switching
at around 2700Hz. The modulation index m will be chosen as 1.0 for all three
approaches.
i
3.2.2 Bipolar PWM Switching Vector
At an output sinusoidal frequency =60 Hz and modulation ratio and
equals 45 and 1.0 respectively for the bipolar approach, the whole bipolar PWM
switching pattern can be determined (Figure 3.2). In order to calculate the harmonic
magnitudes and in Fourier series, the switching vector that contains the
switching angle at which a transition in output waveform happens is listed in Table 3.2
below. The switching vector is computed from 0 to 360 degrees.
1
f
f
m
i
m
n n
b a ,
n
c
15
Table 3.2 Switching vector of Bipolar PWM with =1.0 and =45
i
m
f
m
Vector Vector Vector Vector
i
i
(deg)
V
out
i
i
(deg)
V
out
i
i
(deg)
V
out
i
i
(deg)
V
out
1
0.00 d
V + 24
94.00 d
V 47
184.15 d
V + 70
274.01 d
V
2
4.15 d
V 25
94.01 d
V + 48
187.73 d
V 71
281.96 d
V +
3
7.73 d
V + 26
101.96 d
V 49
192.43 d
V + 72
282.05 d
V
4
12.43 d
V 27
102.05 d
V + 50
195.47 d
V 73
289.89 d
V +
5
15.47 d
V + 28
109.89 d
V 51
200.71 d
V + 74
290.12 d
V
6
20.71 d
V 29
110.12 d
V + 52
203.21 d
V 75
297.77 d
V +
7
23.21 d
V + 30
117.77 d
V 53
208.97 d
V + 76
298.24 d
V
8
28.97 d
V 31
118.24 d
V + 54
210.97 d
V 77
305.63 d
V +
9
30.97 d
V + 32
125.63 d
V 55
217.21 d
V + 78
306.40 d
V
10
37.21 d
V 33
126.40 d
V + 56
218.75 d
V 79
313.45 d
V +
11
38.75 d
V + 34
133.45 d
V 57
225.42 d
V + 80
314.58 d
V
12
45.43 d
V 35
134.58 d
V + 58
226.56 d
V 81
321.26 d
V +
13
46.56 d
V + 36
141.26 d
V 59
233.61 d
V + 82
322.80 d
V
14
53.61 d
V 37
142.80 d
V + 60
234.37 d
V 83
329.03 d
V +
15
54.37 d
V + 38
149.03 d
V 61
241.77 d
V + 84
331.03 d
V
16
61.77 d
V 39
151.03 d
V + 62
242.24 d
V 85
336.79 d
V +
17
62.24 d
V + 40
156.79 d
V 63
249.88 d
V + 86
339.30 d
V
18
69.88 d
V 41
159.30 d
V + 64
250.12 d
V 87
344.53 d
V +
19
70.12 d
V + 42
164.53 d
V 65
257.96 d
V + 88
347.57 d
V
20
77.96 d
V 43
167.57 d
V + 66
258.05 d
V 89
352.27 d
V +
21
78.05 d
V + 44
172.27 d
V 67
266.00 d
V + 90
355.86 d
V
22
86.00 d
V 45
175.86 d
V + 68
266.01 d
V 91
360.00 d
V +
23
86.01 d
V + 46
180.00 d
V 69
274.00 d
V +
Table 3.2 summarizes the switching vectors for bipolar PWM at selected
modulation ratios from
1
to
91
. The bipolar output voltage pattern can be found in
Figure 3.2:
16
3 ......
...
90
91
i
m
f
m Figure 3.2 Bipolar PWM switching pattern with =1.0 and =45
3.2.3 Bipolar PWM Spectrum Analysis
By utilizing the switching vectors obtained in previous section, the theoretical
harmonic spectrum of the bipolar PWM output voltage V
out
can be calculated using
Fourier series theory introduced previously. V
out
is odd and half-wave, thus we obtain:
=
=
= =
0
0
; ) sin( ) (
2
; ) cos( ) (
2
; 0
n odd for t d t n t f b
n odd for t d t n t f a
n even for b a
n
n
n n
(3.8)
For all even harmonics are zero, we only need to consider odd ones. Plotting the
switching vectors in the above equation and normalizing the V
out
from (-V
d
, +V
d
) to (-1,
+1) we obtain the nth odd harmonic:
[ ] [ ] [ ] [ { } ) sin( ) sin( ) sin( ) sin( ) 1 ( ) sin( ) sin( ) sin( ) sin(
2
) cos( 1 ) cos( ) 1 ( ) cos( 1 ) cos( 1
2
45 46 1 3 2 1 2
46
45 1
3
2
2
1
n n n n n n n n
t d t n t d t n t d t n t d t n a
k k
k
k
n
k
k
+ + + + + =
+ + + + + =
L L
L L
]
(3.9)
Similarly, can also be obtained by the following equation:
n
b
17
[ ] [ ] [ ] [ { } ) cos( ) cos( ) cos( ) cos( ) 1 ( ) cos( ) cos( ) cos( ) cos(
2
) sin( 1 ) sin( ) 1 ( ) sin( 1 ) sin( 1
2
46 45 1 2 3 2 1
46
45 1
3
2
2
1
n n n n n n n n
t d t n t d t n t d t n t d t n b
k k
k
k
n
k
k
+ + + + + =
+ + + + + =
L L
L L
]
(3.10)
The magnitude of each harmonic C can be calculated using equation 3.4 after
has been obtained. MATLAB is used to compute the first 100 harmonic
magnitudes and , and plot the frequency spectrum as in Figure 3.3 below:
n
n n
b a ,
n n
b a ,
n
C
Order of Harmonics
(f
n
/f
1
)
Figure 3.3 Frequency spectrum for bipolar PWM with m =1.0 and =45
i f
m
The total harmonic distortion (THD) for this bipolar PWM waveform is about
84.97% as simulated by MATLAB. In Figure 3.3, the resulted fundamental frequency
component is 1.0, which means the magnitude of desired output frequency equal to the
value of DC input voltage V
d
.
The high frequency harmonics appears at around 45
th
harmonics and again at around 90
th
harmonics. This indicates that for bipolar PWM, the
high frequency harmonics will appear around , 2 , 3 and so on. To eliminate
those high frequency harmonic interferences, typical second-order low-pass LC filters
can be used to filter them out.
f
m
f
m
f
m
3.3 Harmonic Analysis of Unipolar Modulation
3.3.1 Unipolar PWM Parameters Consideration
18
In the unipolar PWM switching scheme that has been discussed in Chapter 2, the
output voltage level is switched either between +V
d
and zero or between -V
d
and zero.
Similar to the bipolar case, the unipolar PWM output is a periodic waveform with the
same period as the desired sinusoidal signal. As a result, Fourier analysis can be applied
to extract the desired fundamental frequency component. Like in the bipolar PWM case,
symmetry property is also preferred to reduce harmonic components. From the unipolar
scheme showed in Figure 2.2, it can be found that in order to reach odd and half-wave
symmetry, the frequency modulation ratio for unipolar scheme should be chosen as
an even integer. For comparison with the previous bipolar case in frequency spectrum
analysis, an equivalent output switching frequency f
f
m
switching
around 2700Hz will be
selected. From the equation 3.11 below we can get frequency modulation :
f
m
1
2 ) ( f m f
f unipolar switching
= (3.11)
Here sinusoidal output frequency is 60 Hz. To achieve f
1
f
switching
around
2700Hz and keep an even number, can be selected to be 22 in this unipolar case.
Finally we get f
f
m
f
m
switching
at 2640Hz and modulation index is 1.0, which are
comparable with those in the bipolar PWM.
i
m
3.3.2 Unipolar PWM Switching Vector
Similar to the previous bipolar scheme, after selecting and to be 1.0 and
22 respectively, the switching vector for unipolar PWM can be determined and evaluated
in Table 3.3 below. Switching vectors are computed to 0 to 360 degrees for a whole
period.
i
m
f
m
19
Table 3.3 Switching vector of Unipolar PWM with =1.0 and =22
i
m
f
m
Vector Vector Vector Vector
i
i
(deg)
V
out
i
i
(deg)
V
out
i
i
(deg)
V
out
i
i
(deg)
V
out
1
7.64 d
V + 24
102.18
0 47
202.95 d
V 70
298.16
0
2
8.81
0 25
102.37 d
V + 48
206.37
0 71
299.16 d
V
3
15.29 d
V + 26
110.20
0 49
210.64 d
V 72
306.04
0
4
17.60
0 27
110.72 d
V + 50
215.08
0 73
307.68 d
V
5
22.95 d
V + 28
118.16
0 51
218.38 d
V 74
313.86
0
6
26.37
0 29
119.16 d
V + 52
223.74
0 75
316.27 d
V
7
30.64 d
V + 30
126.04
0 53
226.14 d
V 76
321.63
0
8
35.08
0 31
127.68 d
V + 54
232.33
0 77
324.93 d
V
9
38.38 d
V + 32
133.86
0 55
233.97 d
V 78
329.36
0
10
43.74
0 33
136.27 d
V + 56
240.85
0 79
333.64 d
V
11
46.15 d
V + 34
141.63
0 57
241.85 d
V 80
337.05
0
12
52.33
0 35
144.93 d
V + 58
249.29
0 81
342.40 d
V
13
53.97 d
V + 36
149.36
0 59
249.80 d
V 82
344.72
0
14
60.85
0 37
153.64 d
V + 60
257.64
0 83
351.19 d
V
15
61.85 d
V + 38
157.05
0 61
257.82 d
V 84
352.37
0
16
69.29
0 39
162.40 d
V + 62
265.90
0
17
69.80 d
V + 40
164.72
0 63
265.92 d
V
18
77.64
0 41
171.19 d
V + 64
274.08
0
19
77.83 d
V + 42
172.37
0 65
274.10 d
V
20
85.90
0 43
187.64 d
V 66
282.18
0
21
85.93 d
V + 44
188.81
0 67
282.37 d
V
22
94.08
0 45
195.29 d
V 68
290.20
0
23
94.10 d
V + 46
197.60
0 69
290.72 d
V
Table 3.3 gives the switching vector for the unipolar PWM output. Figure 3.4
below draws the unipolar PWM output voltage V
out
at the selected modulation ratio.
20
3 ......
...
83
84
i
m
f
m Figure 3.4 Unipolar PWM switching pattern with =1.0 and =22
3.3.3 Unipolar PWM Spectrum Analysis
After obtaining switching vector, the theoretical harmonic spectrum of the
unipolar PWM output voltage V
out
can be calculated using Fourier series theory and its
symmetry abbreviation. By normalizing V
out
to (-1, +1), we can obtain for odd n:
[ ] [ ] [ ] { } ) sin( ) sin( ) sin( ) sin( ) sin( ) sin(
2
) cos( 1 ) cos( 1 ) cos( 1 ) cos( 1
2
41 42 1 2 2 1 2
42
41
2
1 2
4
3
2
1
n n n n n n
t d t n t d t n t d t n t d t n a
k k
n
k
k
+ + + + =
+ + + + + =
L L
L L
(3.12)
Similarly, can also be obtained by the following equations:
n
b
[ ] [ ] [ { } ) cos( ) cos( ) cos( ) cos( ) cos( ) cos(
2
) sin( 1 ) sin( 1 ) sin( 1 ) sin( 1
2
42 41 2 1 2 2 1
42
41
2
1 2
4
3
2
1
]
n n n n n n
t d t n t d t n t d t n t d t n b
k k
n
k
k
+ + + + =
+ + + + + =
L L
L L
(3.13)
All even harmonics are absent for this odd and half-wave symmetry. The
magnitude of each harmonic C can be calculated by equation 3.4 using . Figure
3.5 below shows the first 100 harmonic frequency spectrum of unipolar case computed
using MATLAB:
n n n
b a ,
21
Order of Harmonics
(f
n
/f
1
)
Figure 3.5 Frequency spectrum for unipolar PWM with m =1.0 and =22
i f
m
The total harmonic distortion (THD) for this unipolar PWM approach is about
44.78% as simulated by MATLAB, which is significantly lower than that in the bipolar
scheme. In Figure 3.5, the desired fundamental frequency component (the first harmonic)
is also 1.0, indicating the magnitude of desired output frequency remains at V
d
.
The high
frequency components appear at around the 44
th
and the 88
th
harmonics. Although the
harmonics locate at quite similar place as those in bipolar PWM approach, the
magnitudes in the unipolar case are much smaller. From the EMI noise reduction point of
view, the B leg of the H-bridge switches at half of the frequency as it is in bipolar case
because the frequency modulation ratio is 22 in this unipolar case. This leads to a
reduction of EMI noise level. Furthermore, the H-bridge circuit switches at lower
frequency (about a half). The power loss for the switching semiconductor devices
(IGBTs) are reduced according to the following the equation:
sw tot loss
f W P =
(3.14)
In the equation, W
tot
represents the power loss in one on-off switching period, and
is the device switching frequency.
SW
f
3.4 Harmonic Analysis of Modified Unipolar Modulation
3.4.1 Modified Unipolar PWM Parameters Consideration
22
The unipolar PWM scheme discussed in the previous section has lower THD, less
EMI noise and less switching loss than in bipolar PWM. However, two sinusoidal
reference signals are needed. A modified unipolar PWM approach can be obtained by
using one discontinuous piece-sinusoidal reference signal as shown in Figure 2.3. This
modified unipolar PWM scheme works with one H-bridge leg switching at high
frequency (f
switching
) and the other at the fundamental frequency ( ). From Figure 2.3
in Chapter 2, we can see a similarity to the previous bipolar case. The frequency
modulation ratio m for modified unipolar scheme should be chosen as an odd integer to
obtain odd and half-wave symmetry output. For an equivalent output switching frequency
f
1
f
f
switching
around 2700Hz that is to be comparable with previous cases, the frequency
modulation is selected as:
f
m
1 _ mod
) ( f m f
f unipolar ified switching
= (3.15)
As we know, the AC output frequency is 60Hz, so in this modified
unipolar case is to be chosen as 45 to get f
1
f
f
m
switching
around 2700Hz while keeping
even. Finally we get f
f
m
switching
as Hz 2700 60 45 = and also choose =1.0, which
are the same as that of the bipolar PWM talked before.
i
m
3.4.2 Modified Unipolar PWM Switching Vectors
Similarly, the switching vector for modified unipolar PWM is generated and given
in Table 3.4 below. It has been computed from 0 to 360 degrees covering a whole period.
Table 3.4 Switching vector of modified unipolar PWM with =1.0 and =45
i
m
f
m
Vector Vector Vector Vector
i
i
(deg)
V
out
i
i
(deg)
V
out
i
i
(deg)
V
out
i
i
(deg)
V
out
1
5.62 d
V + 24
97.96
0 47
193.10 d
V 70
285.85
0
2
6.45
0 25
98.04 d
V + 48
195.04
0 71
286.16 d
V
3
13.10 d
V + 26
105.85
0 49
200.60 d
V 72
293.67
0
23
Table 3.4 Continued
4
15.04
0 27
106.16 d
V + 50
203.60
0 73
294.36 d
V
5
20.60 d
V + 28
113.67
0 51
208.12 d
V 74
301.42
0
6
23.60
0 29
114.36 d
V + 52
212.13
0 75
302.64 d
V
7
28.12 d
V + 30
121.42
0 53
215.67 d
V 76
309.11
0
8
32.13
0 31
122.64 d
V + 54
220.61
0 77
310.98 d
V
9
35.67 d
V + 32
129.11
0 55
223.26 d
V 78
316.74
0
10
40.61
0 33
130.98 d
V + 56
229.02
0 79
319.40 d
V
11
43.27 d
V + 34
136.74
0 57
230.90 d
V 80
324.34
0
12
49.03
0 35
139.40 d
V + 58
237.37
0 81
327.87 d
V
13
50.90 d
V + 36
144.34
0 59
238.59 d
V 82
331.89
0
14
57.37
0 37
147.87 d
V + 60
245.65
0 83
336.41 d
V
15
58.59 d
V + 38
151.89
0 61
246.34 d
V 84
339.41
0
16
65.65
0 39
156.41 d
V + 62
253.84
0 85
344.97 d
V
17
66.34 d
V + 40
159.41
0 63
254.15 d
V 86
346.91
0
18
73.84
0 41
164.97 d
V + 64
261.96
0 87
353.56 d
V
19
74.15 d
V + 42
166.91
0 65
262.04 d
V 88
354.39
0
20
81.97
0 43
173.56 d
V + 66
270.00
0
21
82.04 d
V + 44
174.39
0 67
270.01 d
V
22
90.00
0 45
185.62 d
V 68
277.96
0
23
90.01 d
V + 46
186.45
0 69
278.04 d
V
The modified unipolar PWM output waveform is given in Figure 3.6 below:
3 ......
...
87
88
i
m
f
m Figure 3.6 Modified unipolar PWM switching pattern with =1.0 and =45
24
3.4.3 Modified Unipolar PWM Spectrum Analysis
Similar Fourier series analysis can be applied to obtain for odd terms in
modified unipolar PWM output, all even ones are zero for odd and half-wave symmetry:
n n
b a ,
[ ] [ ] [ ] { } ) sin( ) sin( ) sin( ) sin( ) sin( ) sin(
2
) cos( 1 ) cos( 1 ) cos( 1 ) cos( 1
2
43 44 1 2 2 1 2
44
43
2
1 2
4
3
2
1
n n n n n n
t d t n t d t n t d t n t d t n a
k k
n
k
k
+ + + =
+ + + + + =
L
L L
(3.16)
n
b can also obtained by the following equations 3.17:
[ ] [ ] [ { } ) cos( ) cos( ) cos( ) cos( ) cos( ) cos(
2
) sin( 1 ) sin( 1 ) sin( 1 ) sin( 1
2
44 43 2 1 2 2 1
44
43
2
1 2
4
3
2
1
]
n n n n n n
t d t n t d t n t d t n t d t n b
k k
n
k
k
+ + + =
+ + + + + =
L
L L
(3.17)
Figure 3.7 below shows the first 100 harmonic frequency spectrum of modified
unipolar PWM approach computed by MATLAB. The total harmonic distortion THD is
about 44.82%, which is nearly the same as in previous unipolar case. This result is
comparable to that of the unipolar PWM output waveform, where the THD is 44.78%.
Order of Harmonics
(f
n
/f
1
)
Figure 3.7 Frequency spectrum for unipolar PWM with m =1.0 and =45
i f
m
Although the THD and the switching loss of the two unipolar PWM schemes are
very close, the modified unipolar approach is different from the original unipolar
25
approach in that the two H-bridge legs are switched at totally different frequencies. A
leg in H-bridge is switched at twice the frequency of unipolar case, while B leg is only
switched at a much lower frequency, i.e., the fundamental frequency (See Figure 2.3).
As a result, the high-frequency EMI noise will be largely reduced because of much less
voltage transition in a certain period at B leg. When we look back at the A leg output,
we can find that although the A leg is switched at a very high frequency, but after the LC
filter, the A leg output voltage in respect to ground V follows the equation:
1
f
AO
BO AB AO
V V V + =
(3.18)
AB
V here is the sinusoidal output waveform, so V only contains very low
frequency voltage transition, which is the same as that in B leg output V . A summation
of all three PWM approaches above will be presented in the next section.
AO
BO
3.5 Comparison
Previous sections have detailed switching vector information and theoretical
spectrum analysis for each of the PWM schemes, a brief comparison of them at an
equivalent PWM output frequency (around 2700Hz) will be summarized in this section.
Before we start, several important performance parameters are defined in advance. The
distortion factor is given in equation below:
1
2
2
2
2
3
2
2
2
1
2
2
2
3 2
) (
)
) (
(
C
n
C C C
V
n
V
DF
n
rms
rms n
+ + +
= =
K
(3.19)
The parameter THD we mentioned above gives information about the total
harmonic distortion level. However, it is not enough to indicate the harmonic distortion
behavior after a second-order LC filter is applied at the output end. Parameter DF is
introduced here to measure the amount of harmonic distortion that remains after using a
simple LC output filter (second-order attenuation). As a result, each harmonic magnitude
is divided by the square of its harmonic number (n
2
). The distortion factor of each
individual harmonic is defined in equation 3.20:
26
2
1
2
1
) (
n C
C
n V
V
DF
n rms n
n
=
(3.20)
Table 3.5 Brief comparisons of the three PWM schemes
SW
f in H-Bridge
Parameters
Scheme
f
m
Leg
A (Hz)
Leg
B (Hz)
Estimated Cost
of Hamonic
EMI Filtering
THD
(%)
DF (%)
LOH
(Hz)
Bipolar 45 2700 2700 High 84.97 1.73 2580
Unipolar 22 1320 1320
Moderately
High
44.78 0.94 2460
Modified Unipolar 45 2700 60
Moderately
Low
44.82 0.92 2460
Another parameter to be introduced is the lowest-order harmonic (LOH). It is the
lowest frequency harmonic component (closest to fundamental frequency) with a
magnitude greater or equal to 3% of the fundamental component. This parameter is used
to locate the point where the first significant harmonic group will appear. Table 3.5 gives
a brief comparison for the three PWM switching approaches. In this table, we find that
the LOH of the three PWM schemes are very close, locating at around the 44th and the
45th harmonics. This is because we select corresponding to have a similar output
switching frequency as a base-line parameter for comparison. The difference clearly
appears in DF and THD parameters. It can be noted that the unipolar and modified
unipolar approach produce much lower harmonic distortion than in the bipolar case. As
talked about in previous sections, the overall switching frequency of the H-bridge
semiconductor switches in two unipolar approaches is nearly half of that in bipolar
scheme. This results in a lower switching loss. Comparing the two unipolar approaches,
we can see they have nearly the same THD and DF values. But the H-bridge switching
frequency of semiconductor devices (IGBT or power MOSFET) is not identical. The two
legs in unipolar case are switched at a same frequency at 1320 Hz. Meanwhile, at the
modified unipolar scheme the two legs are switched at different frequencies, the high
frequency leg (A) is switched at 2700 Hz while the low frequency one (B) is switched at
only 60 Hz, which is preferred in high-frequency EMI noise reduction. Although different
f
m
27
switching frequencies in the modified unipolar PWM scheme could cause switching
stresses between two H-bridge legs, this can be resolved by choosing fast semiconductor
switches for the A leg while using low speed switches in B leg.
28
CHAPTER 4
DIGITAL SIMULATION AND EVALUATION OF
PWM SCHEMES
4.1 Introduction
After the structure description and theoretical spectrum analysis of the three
PWM switching schemes, this chapter reports software simulation results of the
switching-mode PWM inverter system controlled by each of the three PWM control
schemes. The software simulation is conducted on PSpice simulation software, a widely
used Computer Aided Design (CAD) solution for analog and mixed-signal simulations.
The PWM control unit, IGBT based H-bridge inverter unit as well as the output LC filter
will be constructed using PSpice to simulate and evaluate the proposed three PWM
schemes on circuit level. This will lay a foundation for the design of real time hardware
experiment in Chapter 6. As we know, the volume and the cost of second order LC filter
will decrease with the increase of cutoff frequency. As a result, for the consideration of
volume and price for real hardware setup, a higher frequency modulation ratio (see Table
4.1) will be used to increase the required cutoff frequency for LC filter in this simulation
work as well as the experiments in Chapter 6.
Table 4.1 Parameters change between Chapter 3 and Chapter 4 and 5
Values in Chapter 3 Values in Chapter 4 & 5 Parameters
Schemes
f
m
i
m f
switching
f
m
i
m f
switching
Bipolar 45 1.0 2700 81 0.8 4860
Unipolar 22 1.0 2640 40 0.8 4800
Modified unipolar 45 1.0 2700 81 0.8 4860
29
The PSpice simulation procedure in this chapter generally follows the flowchart
in Figure 4.1: First, a device level simulation circuit will be created on the PSpice
schematics tool based on the proposed PWM control algorithm. After going through
necessary debugging process to correct various simulation problems or errors confronted
during simulation, the simulation results waveform will be generated in PSpice A/D
display window. The PSpice A/D can also handle various output data analysis like
Fourier analysis as well as many kinds of mathematic functions. In the simulation, we
will be more interested on the voltage and current output waveform and its frequency
component distribution. Simulation results will be detailed in the following sections.
Output Data Analysis
PSpice Simulation Waveform
System Schematic Layout
PSpice Simulation Flowchart
(a)
(b)
(c)
(a) Circuit level system layout in PSpice Schematics
(b) Time domain simulation result in Pspice A/D
(c) Frequency domain simulation result in Pspice A/D
Figure 4.1 PSpice simulation flowchart
30
In software simulation of PWM control schemes, the circuit schematic can be
divided into two major parts: 1) PWM control unit; 2) H-bridge inverter unit with LC
filter and loads. The PWM control unit generates the specific PWM logic signal to
control the on/off status of each IGBT device. The H-bridge unit represents the basic
inverter H-bridge hardware topology consists of four IGBT power modules works as
power switches. The LC low-pass filter and load are connected to the H-bridge output
end. Between the logic PWM control signal and the high power IGBT devices, gate drive
circuits are needed to effectively drive the IGBT. They also provide isolation between the
high-voltage circuit and the low-voltage logic control unit. As discussed in Chapter 3, the
LOH of bipolar scheme will occur at frequency
1
f m f
f LOH
= . In the digital simulation
study, two fundamental output frequencies will be simulated, one is 60 Hz and the other
is 400 Hz. 400 Hz is often used in aircraft electrical power system. The transfer function
of simple second-order LC low pass filter can be written as:
1
1
) (
2
+
=
C L s
s G (4.1)
f
0
10f
0
100f
0
1000f
0
f
0
/10 f
0
/100 f
0
/1000
Figure 4.2 Magnitude bode plot for second-order LC filter
The magnitude bode plot for the second-order LC filter is shown in Figure 4.2.
With the fixed value inductor at 1 mH, the capacitance can be calculated using the
derivation of the above equation easily. We obtain:
L f s G
s G
L s G
s G
C
=
2 2
) 2 ( ) (
) ( 1
) (
) ( 1
(4.2)
31
For the two fundamental output frequencies 60 Hz and 400 Hz, two sets of LC
values are obtained to suppress the LOH to several attenuation levels: 3%, 1% and 0.5%
(Table 4.3). Considering the volume and the cost of LC components versus the
suppression performance, the first group values with LOH frequency suppression of 3%
is selected for this simulation and later experiment. In order to comply with the hardware
experiment in next chapter, similar power components are chosen from the PSpice library
for the inverter circuit. Table 4.2 below gives the key components selected for software
simulation. This selection can be applied to the unipolar and the modified unipolar cases.
Table 4.2 Components selection for Pspice simulation
Name Part Number Description
IGBT IRGBC30S N-Channel Insulated Gate Bipolar Transistor (IGBT)
Diode MR876 Fast recovery diode
Load Resistor N/A 20 ohms power resistor
Table 4.3 LC selections for 60Hz and 400Hz output frequency
60 Hz 400 Hz
L C L C
LOH
Suppression
1 mH 30 uF 1 mH 1 uF 3% (Selected)
1 mH 100 uF 1 mH 3 uF 1%
1 mH 200 uF 1 mH 6 uF 0.5%
4.2 PSpice Simulation for Bipolar Case
The bipolar PWM scheme algorithm and its theoretical analysis are presented in
Chapter 3. Before hardware implementation, the circuit level simulation by PSpice is
performed to further evaluate and examine this PWM control scheme.
4.2.1 Simulation Circuit Topology
The PSpice simulation schematic for bipolar PWM is given in Figure 4.3. DC
input voltage V
d
is set to 270 VDC. Four major parts of the system (PWM logic
generation, Gate drive elements, Inverter H-bridge, LC filter and load) are outlined using
bolded lines. There are six probe points established to view the result waveforms in next
section. In the bipolar scheme circuit topology, VSIN and VPULSE signal generators are
32
used to create V
control
and V
carrier
signal for PWM modulation. A 10K GAIN followed
by a LIMITER is used to precisely detect voltage transition point. Four voltage-
controlled voltage source (EVALUE) parts consist of the gate drive, which apply the turn-
on voltage between the gate and the emitter of IGBT device. A second-order LC low-pass
filter with the previously calculated inductance and capacitance values and a 20 ohm
resistive load are connected to the inverter output. The frequency modulation ratio is
81 and we choose modulation index to be 0.8 for simulation and comparison under 60
Hz and 400 Hz output respectively.
f
m
i
m
Figure 4.3 PSpice circuit topology for bipolar scheme
4.2.2 Simulation Results for Bipolar Case
Based on the simulation circuit built on PSpice Schematics, a transient analysis
will be performed to examine the input logic waveform, the mid-stage waveform as well
as the final output waveform of bipolar PWM scheme.
33
Case I: 60 Hz Output
Figure 4.4 below shows the input modulation signal in one fundamental period
(probe #1 and probe #2) and the PWM control logic signal (probe #3 for B bridge and
probe #4 for A bridge). In this figure, the two bipolar PWM control logic signal are in the
reverse logic, which follows the basic concept of bipolar PWM scheme. The IGBT turn
on voltage here is selected to be 15.0 volts according to the IRGBC30S IGBT device data
sheet, while the turn-off voltage is 0 volts.
Figure 4.4 Bipolar PWM input and PWM control waveform ( ) 8 . 0 =
i
m
Figure 4.5 illustrates the H-bridge PWM output waveform and its spectrum
analysis. Just as expected, the H-bridge output is a bipolar waveform transiting between
+270V(+V
d
) and 270V(-V
d
). The spectrum analysis in Figure 4.5 also confirms this by
having a fundamental component (60 Hz) magnitude at 270*0.8=216(V) and the LOH
around 4.8 KHz, which is exactly around the 81s ( ) harmonic.
f
m
34
Figure 4.5 Bipolar PWM H-bridge output waveform and its Fourier analysis (60 Hz)
Figure 4.6 shows load output voltage and current as well as the current through
inductor ( ). As we can see from the result, the LC filter successfully suppressed the
high frequency harmonics and resulted a sinusoidal output voltage at desired frequency of
60 Hz and amplitude of about 216V.
L
I
Figure 4.6 Bipolar PWM inductor current and load output waveform (60 Hz)
35
Case II: 400 Hz Output
In case II, the output frequency is increased to 400Hz and the modulation ratio
remains at m =81 and =0.8 respectively. To compare and verify the results of case I,
other parameter settings are the same as case I. The PWM control waveform for one
period will be similar to those in Case I. Figure 4.7 gives the H-bridge PWM output and
spectrum analysis for 400 Hz output. Figure 4.8 demonstrates load output and the
inductor current waveform. The LOH appears at the 81sharmonics, which is about 32
KHz when the fundamental frequency is 400 Hz. As a result, the LC filter with a smaller
capacitance value can be used to effectively suppress the harmonics and obtain sinusoidal
voltage output at 400 Hz.
f i
m
Figure 4.7 Bipolar PWM H-bridge output waveform and its Fourier analysis (400 Hz)
Figure 4.8 Bipolar PWM inductor current and load output waveform (400 Hz)
36
4.3 PSpice Simulation for Unipolar Case
Similar to the previous simulation of bipolar PWM, the unipolar PWM algorithm
is put into PSpice simulation for further evaluation.
4.3.1 Simulation Circuit Topology
As discussed in Chapter 3, the LOH of unipolar scheme will occur at around the
s harmonic location. The LC parameters selection remains unchanged from Table
4.3.
f
m 2
Figure 4.9 PSpice circuit topology for unipolar scheme
The simulation schematic for the unipolar PWM is close to that of the bipolar PWM. A
modification took place on PWM control unit to implement the unipolar PWM
37
modulation algorithm. There are two V
control
signals used for modulation (probe #1 and
#2 in Figure 4.10), and result in a unipolar output.
4.3.2 Simulation Results for Unipolar Case
By a similar approach, a transient analysis is performed to examine the input logic
waveform, the mid-stage waveform and the output waveform of this unipolar PWM
scheme.
Case I: 60 Hz Output
Figure 4.10 shows input modulation signal (probe #1, #2 and #3) in one
fundamental period and the resulting PWM control logic signal (probe #4 for B bridge
and probe #5 for A bridge). We can see the PWM gating signal is correctly generated
according to the unipolar control scheme as discussed in previous chapters.
Figure 4.10 Unipolar PWM input and PWM control waveform ( ) 8 . 0 =
i
m
38
Figure 4.11 Unipolar PWM H-bridge output waveform and its Fourier analysis (60 Hz)
Figure 4.12 Unipolar PWM inductor current and load output waveform (60 Hz)
39
In this simulation, the AC load is a 20 ohm resistive load. The output load current
and voltage are about 8 A (rms) and 160 V (rms) respectively. Thus the output power is
about 1.3 KVA. This unipolar scheme has less harmonic distortion and the sinusoidal load
voltage is smoother than that of bipolar scheme.
Case II: 400 Hz Output
Again, a simulation of 400Hz output is conducted for unipolar scheme. Figure
4.13 and Figure 4.14 show the output waveforms.
Figure 4.13 Unipolar PWM H-bridge output waveform and its Fourier analysis (400 Hz)
Figure 4.14 Unipolar PWM inductor current and load output waveform (400 Hz)
40
4.4 PSpice Simulation for Modified Unipolar Case
In the following section, PSpice simulation for the modified unipolar PWM
scheme will be analyzed by a similar procedure.
4.4.1 Simulation Circuit Topology
Similar to the simulation of the bipolar scheme, the modified unipolar PWM
scheme will have the LOH that occurs at the s harmonic location. In the LC filter
design, the parameters in Table 4.3 also apply to this modified unipolar PWM control
system. Figure 4.15 below is a circuit diagram for the modified unipolar simulation.
f
m
Figure 4.15 PSpice circuit topology for modified unipolar scheme
41
4.4.2 Simulation Results for Modified Unipolar Case
A transient analysis is conducted for the simulation of modified unipolar PWM
scheme.
Case I: 60 Hz Output
Figure 4.16 below shows the modulation waveform for the modified unipolar
PWM. Probe #1 and #2 are the carrier and the control reference signal respectively. The
PWM control logic signal can be found in probe #3 and #4 for B and A phase of the
inverter. It can be clearly seen that in this approach the bridge A and B are switched at
two different frequencies.
Figure 4.16 Modified unipolar PWM input and PWM control waveform ( m ) 8 . 0 =
i
Figure 4.18 below shows the voltage and current output of the modified unipolar
PWM. From the figure above we can see that the output waveform is smoother than
bipolar scheme, the magnitude of the sinusoidal waveform is at 214.0 volts according to
the resulted simulation output data in Pspice.
42
Figure 4.17 Modified unipolar PWM H-bridge output waveform and Fourier analysis (60 Hz)
Figure 4.18 Modified unipolar PWM inductor current and load output waveform (60 Hz)
43
Case II: 400 Hz Output
A simulation to obtain 400 Hz sinusoidal output is conducted for modified
unipolar scheme. Figure 4.19 and Figure 4.20 present the PWM and load waveform. The
amplitude of the sinusoidal load output voltage V
out
is at 208.4 volts, which generally
agrees with the previous theoretical analysis.
Figure 4.19 Modified unipolar PWM H-bridge output and Fourier analysis (400 Hz)
Figure 4.20 Modified unipolar PWM inductor current and load output waveform (400 Hz)
44
4.5 Conclusion on Software Simulation
From the results obtained in the previous sections, we can conclude that the
digital simulation on PSpice successfully evaluated the feasibility and performance of the
three PWM modulation approaches for single-phase DC-AC power converter operating at
60 Hz and 400 Hz. We can see that the load output is sinusoidal at desired output
frequency. As to inductor current, it is quite clearly that the 60 Hz case has larger ripple
than the 400 Hz case. This is due to a faster switching frequency is employed in the
400Hz case. Table 4.4 below summarized the simulation performance of the three PWM
schemes under similar parameters and operating conditions. The V
out
in the table
represents the voltage across the resistive load, which is the output voltage after LC low-
pass filter. Generally speaking, the bipolar PWM scheme is a simple PWM algorithm, but
its V
out
has larger harmonic distortion than the other two unipolar schemes using the
same low-pass filter. The value of the total harmonic distortion (THD) and output voltage
magnitude (V
out
) of the two unipolar approaches are close to each other in our software
simulation. However, as we discussed in Chapter 3, the modified unipolar PWM scheme
reduces the high frequency EMI noise because its B leg in H-bridge switched at
fundamental frequency only. High frequency common-mode EMI noise is cause by the
high frequency abrupt line-to-ground voltage changes. Figure 4.21 below demonstrates
the leg (line) B-to-ground voltage V for all the three PWM schemes, in this figure it
clearly shows that the modified unipolar PWM scheme has much less abrupt voltage
transitions in one period than the other two PWM approaches, thus leads a better
suppression of high frequency common mode EMI noise.
BO
Table 4.4 Overall performances for three PWM schemes
60Hz Output 400Hz Output
Conditions
Schemes out
V
Magnitude
THD
THD
Ratio
out
V
Magnitude
THD
THD
Ratio
Bipolar 214.1 (V) 3.79 % 1.00 208.2 (V) 2.96 % 1.00
Unipolar 214.2 (V) 2.06 % 0.54 208.4 (V) 1.05 % 0.35
Modified Unipolar 214.0 (V) 2.09 % 0.55 208.4 (V) 1.10 % 0.37
Note: The THD ratio is normalized such that the THD of bipolar PWM to be a unit value.
45
Figure 4.21 Line-to-ground voltage (V ) for three PWM schemes
BO
46
CHAPTER 5
SYSTEM IMPLEMENTATION BASED ON A DSP
In this chapter, the implementation of the three open-loop PWM control schemes
will be discussed. The hardware implementation is based on TMS320F2812 DSP
platform. It is used to drive a lab prototype DC-AC inverter. With the assistance of the
powerful DSP development tool - Code Composer Studio
TM
(CCStudio 2.1) provided by
Texas Instrument, we can build, debug, evaluate and analysis the DSP based
implementation of the PWM schemes quickly and efficiently.
5.1 Hardware Configuration
Hardware prototype for this experiment can be divided into the following
sections: a single-board DSP, lab prototype DC-AC converter setup as well as LC low
pass filter & load configuration.
5.1.1 DSP Board Configuration
In this experiment, we use eZdsp
TM
F2812 stand-alone DSP board as a hardware
platform for our DSP controller. The eZdsp
TM
F2812 board comes with a
TMS320F2812A DSP chip, which allows full-speed verification of the high-level
language code built on Code Composer Studio
TM
tools. More detailed configuration and
features of the F2812 DSP are listed in Appendix B. There are two expansion connectors,
Digital I/O expansion and analog expansion. They provide additional circuit interface
with other circuits. The PWM output pins in the I/O expansion are utilized in this
hardware experiment for the output of the PWM control. Figure 5.1 below shows a block
diagram of the eZdsp
TM
F2812 DSP board.
Among various function modules of the TMS320F2812, a fixed point DSP
processor, the Event Manager (EV) module is used to program the PWM control
algorithms. Event manager module of TMS320F2812 DSP includes two identical blocks,
47
EVA and EVB. Both come with 16-bits general-purpose timers, compare units, and
capture units. For the single-phase PWM schemes that apply to our four switches in the
full-bridge DC-AC converter described in Figure 1.2, EVA block with four PWM outputs
PWM1 to PWM4 can satisfy the gate control requirements. Each PWM output bit is used
to control one IGBT switch in DC-AC converter. Figure 5.2 below highlights the EV
function blocks and the control outputs. The interfaces with other components will be
detailed in later sections.
Parallel Port /
JTAG
Controller
External
JTAG
Parallel Port
PC
TMS320F2812
DSP Processor
A/D
Converter
Event
Manager
JTAG
Interface
A
n
a
l
o
g
e
x
p
a
n
s
i
o
n
I
/
O
e
x
p
a
n
s
i
o
n
GU+
GU-
GV+
GV-
To Computer
Bolck Diagram of eZdsp
TM
F2812
Control &
Interrupts
Figure 5.1 Block diagram of eZdsp
TM
F2812
Digital
Comparator 1
Digital
Comparator 2
GP Timer 1
Dead-
Band
Logic
Output
Logic
Prescaler
PWM 1
PWM 2
PWM 3
PWM 4
System clock
150MHz
Timer Clock
75MHz
Compare Control Registers
Utilized Event Manager A Function Block diagram
Match Value 1
Match Value 2
Up-down Counting
Compare
match
Figure 5.2 Utilized EVA function block diagram
48
Figure 5.3 eZdsp
TM
F2812 DSP board
5.1.2 Prototype DC-AC Converter
A scaled-down three-phase DC-AC converter is used in this experiment. This
prototype converter has been designed and built by other program of Dr. Jie Chang. Only
two phases of the converter are activated to make it function as a single-phase full bridge
DC-AC converter shown in Figure 1.2. Figure 5.4 below gives a picture of this prototype
DC-AC converter.
Figure 5.4 A picture of prototype DC-AC converter
49
Similar to the digital simulation circuit in Chapter 4, this DC-AC converter can be
divided into the following parts:
1. Optocoupler isolation
HCPL-4506 Optocoupler modules are used for isolation between DSP PWM logic
output signal and the converter high voltage circuit parts. The HCPL-4506 optocoupler
contains a GaAsP LED and a high gain photo detector to realize the isolation and to
minimize propagation delay.
2. IGBT gate driver
In this experiment, IR2181 high speed IGBT gate driver chip is used to effectively
drive the IGBTs by the PWM control signals from DSP. IR2181 has the capability of
independently driving two IGBTs (high side and low side) simultaneously with the high
side operation voltage at up to 600 Volts.
Figure 5.5 Typical connection of IR2181
3. Ultra fast co-pack IGBT
As to the IGBT power transistors, we will use the IRG4BC30UD IGBT package
with ultra fast soft recovery diode. The voltage rating of this IGBT is at 600 Volts, while
the switching frequency is up to 40 KHz.
5.1.3 LC filter and Load
In comparison with the previous digital simulation results, two output frequencies
of 60 Hz and 400 Hz are produced in the experiment. The inductance, capacitance as well
as load resistance remain the same values as those used in the digital simulation and
shown in Table 4.3. Figure 5.6 shows the second-order LC filter and load configuration.
50
Input
Load =20
L=1mH
C=30/1uF
Figure 5.6 LC filter & load configuration
5.1.4 Experimental System Setup
Figure 5.7 shows a system overview of the experiment hardware setup.
Figure 5.7 Experiment system setup
51
5.2 Circuit Interface
Section 5.1 describes the configuration of each key hardware component in the
experimental system. In this section, circuit interface between these components will be
discussed. Figure 5.8 shows a general interface configuration between different
components. As in the previous sections, four pins on DSP board are used as PWM logic
output, PWM1 to PWM4 (Pin #9, #10, #11 and #12 in P8 connector). More information
about pin allocation of TMS320F2812 eZdsp
TM
board can be found in Appendix B. The
PWM logic outputs are connected to corresponding optocouplers and gate drive input
ports on the prototype DC-AC converter. The U and V phase of the single-phase full
bridge DC-AC converter are connected to a LC filter to power a load as shown in Figure
5.8.
5.3 Program Design of PWM Control
With the aid of Code Composer Studio
TM
(CCStudio 2.1), a software development tool,
program code of the PWM schemes can be built, debugged and executed on this system
platform. Figure 5.9 below illustrates the operations sequence of the C code of the PWM
control that executed on the CCStudio 2.1 platform. In order to explain the program
coding structure, we take the unipolar PWM scheme as an example. As shown in this
flowchart, first, the PWM look-up tables are loaded and every related module in DSP is
initialized, then the program goes into a forever loop and stays in idle state. In unipolar
PWM control, two digital compare units are used to function as the two V
control
signals
in the unipolar PWM modulation. Every time general-purpose timer (GP timer 1)
matches the current look-up table value in either of the two compare units, a transition in
the PWM output pin happens to generate the PWM pattern.
52
TMS320F2812
DSP
GU+
U
V
W
GV+ GW+
GU- GV- GW-
HCPL 4506
Optocoupler
PWM1
P8_Pin#9
PWM2
P8_Pin#10
PWM3
P8_Pin#11
PWM4
P8_Pin#12
V
in
V
out
V
in
V
out
V
in
V
out
V
in
V
out
IR2181
IGBT Gate Driver
H
in
H
out
L
in
L
out
H
in
H
out
L
in
L
out
U
V
T8
GND
X
X
X
DC Voltage
V
d
Input
U+
U-
V+
V-
Load=20
L
C
U
V
COM
COM
GND
GND
eZdsp Board
Prototype DC-AC
Converter
LC Filter & Load
Not used phase
Figure 5.8 General experiment circuit interface
53
START
Initialize System
Control
Intitialize EVA
Module Parameters
Counter=0
Map CMPINT
Interrupt to ISR
Clear All Interrupts
Flags
Disable CPU
Interrupts
Enable CMPINT
Interrupt
Forever Loop
CMPINT
Happens?
PWM Switching
Look-up Table
Main Routine
Interrupt Service
Routine (ISR)
Counter=Counter+1
Update EVA
Compare
Parameters From
Look-up Table
Enable CMPINT
Again
CMP1INT Dsiabled
Return
Yes No
Figure 5.9 Program flowchart
Meanwhile, the corresponding compare match interrupt (CMP1INT or
CMP2INT) is triggered and the program goes to the interrupt service routine (ISR) to
update the compare unit to the next value in look-up table. Then the program returns to
54
the idle state and waits for the coming of next compare match. This code produces the
required PWM control waveform in the experiment. Different from the unipolar PWM,
one compare match unit and its interrupt (CMP1INT) is needed for bipolar PWM for it
has only one V
control
signal. PWM look-up tables are created by MATLAB for each of
the three PWM schemes we discussed earlier. 60 Hz and 400 Hz frequency outputs are
tested in the experiment. Another function of the TMS320F2812 DSP is the
programmable dead-band time control unit for the switching converter bridge. It allows
the software setup of selected dead-band time. In our experiment, the dead-band time is
set to be s 8 . 0 .
5.4 Experimental Results
In this section, detailed experimental results of the three PWM switching schemes
are demonstrated for 60 Hz and 400 Hz output respectively. The modulation index
will be chosen as 0.8 in this experiment. The DC input voltage V
i
m
d
is set to be 30 Volts.
According to Equation 1.3, we can calculate the theoretical output peak voltage is of 24
Volts.
5.4.1 Bipolar PWM Scheme
Case I: 60 Hz
Figure 5.10 and Figure 5.12 below shows the DSP PWM control output and load
output waveform for bipolar PWM approach. As we can see in Trace 3 waveform, there
is no zero states exist in this bipolar scheme. In the load output waveform, the sinusoidal
waveform is exactly at the expected output frequency 60 Hz. The peak output voltage is
about 21 Volts, which approximates the theoretical calculation. Some voltage losses are
caused by the turn-on voltage drops of the IGBTs. The current peak value is about 1.05
Amps. Generally, these experiment results are close to our previous theoretical
calculation and simulation results. From the spectrum analysis of the output voltage in
Figure 5.11 and Figure 5.13, we can see there is some distortion in the H-bridge and load
output voltage waveform.
55
Trace 3
U phase control
Trace 2
V phase control
Trace 1
U - V
Trace 3
Load Current
Figure 5.10 DSP control output for bipolar at 60 Hz
Figure 5.11 Frequency spectrum of H-bridge output for bipolar at 60Hz
Trace 2
Load Voltage
Figure 5.12 Load voltage and current for bipolar at 60 Hz
Figure 5.13 Load voltage spectrum for bipolar at 60 Hz
56
Case II: 400 Hz
Another experiment at 400 Hz output is conducted and the results are shown in
Figure 5.14 to Figure 5.17 below. From the output waveform, the fundamental frequency
of 400 Hz is obtained. The peak voltage and current value are of 20 Volts and 1.0 Amp
respectively, which are consistent with the previous simulation result in the 400 Hz case.
The spectrum analysis result of the load voltage is given in Figure 5.17.
Trace 3
U phase control
Trace 2
V phase control
Trace 1
U - V
Trace 3
Load Current
Figure 5.14 DSP control output for bipolar at 400 Hz
Figure 5.15 Frequency spectrum of H-bridge output for bipolar at 400Hz
Trace 2
Load Voltage
Figure 5.16 Load voltage and current for bipolar at 400 Hz
57
Figure 5.17 Load voltage spectrum for bipolar at 400 Hz
5.4.2 Unipolar PWM Scheme
Case I: 60 Hz
For the unipolar PWM scheme, the results are shown in Figure 5.18 to Figure
5.21. In Figure 5.18, Trace 1, 2 and 3 illustrates a unipolar control waveform. Load
output waveform is exactly at the expected output frequency 60 Hz. The peak output
voltage is the same as in previous bipolar case at about 22 Volts. The current peak value
is about 1.1 Amps. The experimental results confirm our previous theoretical calculation
and simulation results.
Trace 3
U phase control
Trace 2
V phase control
Trace 1
U - V
Figure 5.18 DSP control output for unipolar at 60 Hz
58
Figure 5.19 Frequency spectrum of H-bridge output for unipolar at 60Hz
Trace 3
Load Voltage
Trace 2
Load Current
Figure 5.20 Load voltage and current for unipolar at 60 Hz
Figure 5.21 Load voltage spectrum for unipolar at 60 Hz
Case II: 400 Hz
Another experiment with 400 Hz output is conducted and the results are shown in
Figure 5.22 to Figure 5.25. From the output waveform, the output frequency is exactly at
59
400 Hz. The peak voltage and current value is about 20 Volts and 1.0 Amp respectively,
which comply with the previous simulation results.
Trace 3
U phase control
Trace 2
V phase control
Trace 1
U - V
Trace 2
Load Current
Figure 5.22 DSP control output for unipolar at 400 Hz
Figure 5.23 Frequency spectrum of H-bridge output for unipolar at 400Hz
Trace 3
Load Voltage
Figure 5.24 Load voltage and current for unipolar at 400 Hz
60
Figure 5.25 Load voltage spectrum for unipolar at 400 Hz
5.4.3 Modified Unipolar PWM Scheme
Case I: 60 Hz
The experimental test results of the modified unipolar PWM have been obtained.
Figure 5.26 shows the modified unipolar PWM switching pattern. Load output waveform
provides an output voltage frequency of 60 Hz. The peak output voltage is same as in
previous bipolar case at about 20 Volts, and the current peak value is about 1.0 Amps. In
Figure 5.27 and Figure 5.29, the spectrum analysis demonstrates that the harmonic
distortion of the H-bridge output and load output voltage (also output current) are quite
small and the sinusoidal waveform is smooth.
Trace 3
U phase control
Trace 2
V phase control
Trace 1
U - V
Figure 5.26 DSP control output for modified unipolar at 60 Hz
61
Figure 5.27 Frequency spectrum of H-bridge output for modified unipolar at 60Hz
Trace 3
Load Voltage
Trace 2
Load Current
Figure 5.28 Load voltage and current for modified unipolar at 60 Hz
Figure 5.29 Load voltage spectrum for modified unipolar at 60 Hz
Case II: 400 Hz
The 400 Hz experimental test is conducted and the results are shown in Figure
5.30 to Figure 5.33. As seen from the output waveform, the output frequency is exactly at
62
400 Hz and the peak voltage and current value is about 21.5 Volts and 1.12 Amps
respectively, which comply with the previous simulation result.
Trace 3
U phase control
Trace 2
V phase control
Trace 1
U - V
Trace 2
Load Current
Figure 5.30 DSP control output for modified unipolar at 400 Hz
Figure 5.31 Frequency spectrum of H-bridge output for modified unipolar at 400Hz
Trace 3
Load Voltage
Figure 5.32 Load voltage and current for modified unipolar at 400 Hz
63
Figure 5.33 Load voltage spectrum for modified unipolar at 400 Hz
64
CHAPTER 6
CONCLUSIONS
6.1 Conclusion
This thesis has evaluated three open-loop PWM control schemes for single-phase
DC-AC converter applications. The evaluation is based on comparative studies using
several methods: 1.) Theoretical calculation of the spectrum in the frequency domain; 2.)
Computational simulation in MATLAB; 3.) Digital simulation analysis using PSpice; 4.)
DSP based hardware experimental implementation. Based on the results shown in the
previous chapters, first, we can conclude that the two unipolar PWM schemes have
advantages over the bipolar PWM scheme in lower total harmonic distortion (THD) and
reduction of high-frequency Electromagnetic Interference (EMI) noise.
Second, when the two unipolar PWM schemes are compared, we can assert that
they have nearly the same performance in total harmonic distortion (THD) level.
However, the main difference between them is the common-mode high frequency EMI
noise reduction. As demonstrated and analyzed in this thesis, the modified unipolar PWM
scheme has an advantage in the reduction of common-mode EMI noise because the
output voltage lines of this scheme is switched only at the fundamental frequency.
Therefore, the related EMI noise are reduced.
Hardware implementation given in Chapter 5 shows the experimental results.
They verify the feasibility of all three PWM control schemes using a DSP hardware
platform. Two output frequencies 60 Hz and 400 Hz are tested with PWM switching
frequency conditions
at about 4.8 KHz and 32 KHz respectively. Throughout this
experiment, the new TMS320F2812 DSP that we used can satisfy the requirement of the
DSP based real-time implementation of high switching frequency PWM schemes at up to
32 KHz.
6.2 Future Research Works
65
This thesis performs a systematic analysis of PWM control schemes for single-
phase full-bridge DC-AC converter topology given in Figure 1.2, which is a two-level
DC-AC converter. In order to further reduce harmonic content of the output voltage and
current, various multi-level DC-AC converter topologies are proposed and analyzed in
recent years [24-26]. These multi-level topologies are basically derivations from the two-
level topology by adding additional IGBT power switches to the bridge circuit. PWM
control techniques are still the most popular and efficient method for multi-level power
conversion. Theoretical and simulation approaches used in this thesis can be extended for
PWM scheme studies for multi-level applications. It is reported that with the increase of
converter topology levels, the system harmonic distortion will be reduced accordingly
under the same carrier frequency [25]. As a trade off, the complexity of circuit topology
and PWM scheme will increase. Future research works are recommended to explore
advanced solutions with increased performance, reliability and robustness, while
reducing the control complexity and cost.
66
APPENDIX A
CLOSED-LOOP CONTROL SYSTEM SIMULATION
Introduction
This thesis mainly talked about the open loop PWM control scheme. In this
section, the structure of closed loop control of DC-AC power converter will be briefly
discussed. The closed loop control introduced in this chapter consists of an inner current
loop and an outer voltage loop to better satisfy different linear or non-linear load
disturbance. System level simulations of the whole inverter and control system will be
performed based on MATLAB-Simulink. Proportional-plus-integral (PI) controller will
be used in this dual-loop control system to regulate output voltage of the PWM inverter.
Control system structure
The current and voltage dual-loop control system for a single-phase PWM
inverter can effectively reduce output voltage distortion and achieve fast dynamic
response [17, 18]. Figure A.1 below shows a control scheme reported in [19]. In this
control scheme output voltage V and inductor current will form an outer loop and an
inner loop each governed by a PI controller. In additional, load current and the output
voltage will act as feedback compensation for the reduction of output disturbance
even under rough load conditions. The reference input will give the desired output
voltage as a control reference. In this DC-AC converter case, the reference will be
sinusoidal signal at wanted frequency. A current limiter is placed before the signal
reference input to prevent inductor current overflow.
out L
I
out
I
out
V
L
I
67
IGBT Inverter Bridges
CT CT
A/D A/D A/D
PI
Controller
PI
Controller
PWM
Modulator
Current
Limiter
+
+ _
+
+
+
+
_
Reference
input
V
out
I
out
I
L
Loads
LC
Filter
V
out
+
_
Inner Current Loop
Outer Voltage Loop
DC
Input
Figure A.1 Dual-loop control scheme for single-phase PWM inverter
Simulation Results
Based on the dual loop control scheme discussed before, a system level
simulation model on MATLAB-Simulink software is built as shown in Figure A.2. In the
simulation model, anti-aliasing filters are added before each A/D converter to avoid
folding effect in digital sampling stage. The normalization unit that comes before the
PWM generator is used to normalize the control signal in order to fit the PWM module in
MATLAB-Simulink. Two separate PID controllers for inner and outer loop are tuned to
have satisfactory response under step input and different non-linear load conditions.
68
Figure A.2 MATLAB Simulink simulation model
Step response study
Figure A.3 Step response of closed loop control scheme
69
As shown in Figure A.3, a step signal at 0.02 second with modulation index 0.9
(243 Volts) is input as voltage reference in order to test the step transient response of the
control system under a non-linear load. The load consists of a series connection of RLC
load and a diode that is non-linear. In the figure we can see that the voltage response has
small overshoot and the settling time ( t ) is also relatively short, which indicates a good
performance of the dual control scheme with proposed PI controllers.
s
70
APPENDIX B
KEY FEATURES OF DSP BOARD
Features of eZdsp
TM
F2812:
The eZdsp
TM
F2812 has the following main features:
1.) TMS320F2812 Digital Signal Processor
2.) 150 MIPS operating speed
3.) 18K words on-chip RAM
4.) 128K words on-chip Flash memory
5.) 64K words off-chip SRAM memory
6.) 30 MHz clock
7.) 2 Expansion Connectors (Analog, I/O)
8.) Onboard IEEE 1149.1 JTAG Controller
9.) 5 volts only operation with supplied AC adapter
10.) TI F28xx Code Composer Studio tools driver
11.) On board IEEE 1149.1 JTAG emulation connector
Connectors and utilized Pins of eZdsp
TM
F2812:
eZdsp
TM
F2812 equips nine major connectors as shown in Figure B.1 below.
Their functions are summarized in Table B.1.
Figure B.1 eZdsp
TM
F2812 connector positions
71
Table B.1 eZdsp
TM
F2812 Connector functions
Connector Function
P1 JTAG Interface
P2 Expansion
P3 Parallel Port / JTAG Controller Interface
P4/P7/P8 I/O Interface
P5/P9 Analog Interface
P6 Power Connector
As demonstrated in this thesis, four PWM output pins, PWM1 to PWM4, in I/O
interface (P8) are used to provide the PWM control signals for our DC-AC converter. The
detailed pin assignment for P8 connector is shown in Table B.2:
Table B.2 P8 connector Pin allocation
Pin # P8 Signal Pin # P8 Signal Pin # P8 Signal Pin # P8 Signal
1
+5 Volts
11 PWM3 21
No connect
31
PWM8
2
+5 Volts
12 PWM4 22
XINT1N/XBIOn
32
PWM9
3
SCITXDA
13 PWM5 23
SPISIMOA
33
PWM10
4
SCIRXDA
14 PWM6 24
SPISOMIA
34
PWM11
5
XINT1n/XBI
On
15
T1PWM
25
SPICLKA
35
PWM12
6
CAP1/QEP1
16
T2PWM
26
SPISTEA
36
CAP4/QEP3
7
CAP2/QEP2
17
TDIRA
27
CANTXA
37
T1CTRIP
8
CAP3/QEPI1
18
TCLKINA
28
CANRXA
38
T3CTRIP
9 PWM1 19
GND
29
XCLKOUT
39
GND
10 PWM2 20
GND
30
PWM7
40
GND
72
REFERENCES
[1] Wilson, T.G. The evolution of power electronics- Power Electronics, IEEE
Transactions on, Volume 15, Issue 3, May 2000, pp. 439-446.
[2] Bose, B.K. Power electronics-a technology review - Proceedings of the IEEE,
Volume 80, Issue 8, Aug. 1992, pp. 1303-1334.
[3] Jie Chang, Advancement and trends of power electronics for industrial
applications - IECON '03. The 29th Annual Conference of the IEEE, Volume 3,
2003, pp. 3021-3022.
[4] Rashid, H.M. Power electronics- Circuits, Devices, And Applications
Prentice-Hall, New Jersey, 1993.
[5] Mohan, N., Undeland, T., Robbins, W., Power electronics- Converters,
Applications, and Design John Wiley & Sons, Inc. 1995.
[6] Hart, D.W., Introduction to Power Electronics Prentice Hall, New Jersey,
1997.
[7] Jie Chang, Sun, T., Anhua Wang, Highly compact AC-AC converter
achieving a high voltage transfer ratio - Industrial Electronics, IEEE
Transactions on, Volume 49, Issue 2, April 2002, pp. 345-352.
[8] Lakshmikanth, A., Morcos, M.M., A power quality monitoring system: a
case study in DSP-based solutions for power electronics - Instrumentation
and Measurement, IEEE Transactions on, June 2001, pp. 724-731.
[9] Yaosuo Xue, Liuchen Chang, Sren Baekhj Kjaer, Bordonau, J., Shimizu, T.,
Topologies of single-phase inverters for small distributed power
generators: an overview - Power Electronics, IEEE Transactions on,
Volume 19, Sept. 2004, pp. 1305-1314.
[10] Keliang Zhou, Danwei Wang, Relationship between space-vector modulation
and three-phase carrier-based PWM: a comprehensive analysis - Industrial
Electronics, IEEE Transactions on, Volume 49, Issue 1, Feb. 2002, pp. 186-196.
[11] Holtz, J., Pulsewidth modulation-a survey - Industrial Electronics, IEEE
Transactions on, Volume 39, Issue 5, Oct. 1992, pp. 410-420.
[12] Van der Broeck, H.; Miller, M. Harmonics in DC to AC converters of
single phase uninterruptible power supplies - Telecommunications
Energy Conference, 1995, INTELEC '95, 17th International, 1995, pp. 653-658.
73
[13] Dehbonei, H., Borle, L., Nayar, C.V., A review and a proposal for optimal
harmonic mitigation in single-phase pulse width modulation - Power
Electronics and Drive Systems, 2001, Proceedings, 2001 4th IEEE
International Conference on, Volume 1, 2001, pp. 408-414.
[14] Yo-Chan So, Seung-Ki Sul, Conducted EMI in PWM inverter for household
electric appliance - Industry Applications, IEEE Transactions on, Volume 38,
Issue 5, 2002, pp. 1370-1379.
[15] Akagi, H., Hasegawa, H., Doumoto, T., Design and performance of a passive
EMI filter for use with a voltage-source PWM inverter having sinusoidal output
voltage and zero common-mode voltage - Power Electronics Specialists
Conference, 2002, 2002 IEEE 33rd Annual, Volume 3, 2002, pp. 1543-1550.
[16] Son, Y-C, Seung-Ki Sul, A new active common-mode EMI filter for PWM
inverter - Power Electronics, IEEE Transactions on, Volume18, Issue 6, 2003,
pp. 1309-1314.
[17] Nabae, A., Nakano, H., Okamura, Y., A novel control strategy of the inverter
with sinusoidal voltage and current outputs - Power Electronics Specialists
Conference, PESC '94 Record, 25th Annual IEEE, 1994, pp. 154-159.
[18] Abdel-Rahim, N.M., Quaicoe, J.E., Analysis and design of a multiple feedback
loop control strategy for single-phase voltage-source UPS inverters - Power
Electronics, IEEE Transactions on, Volume 11, Issue 4, July 1996, pp. 532-541.
[19] Shih-Liang Jung, Hsiang-Sung Huang, Meng-Yueh Chang, Ying-Yu Tzou,
DSP-based multiple-loop control strategy for single-phase inverters
used in AC power sources - Power Electronics Specialists Conference, 1997,
PESC '97 Record, 28th Annual IEEE, Volume 1, June 1997, pp. 706-712.
[20] Akagi, H., The state-of-the-art of power electronics in Japan - Power
Electronics, IEEE Transactions on, Volume 13, Issue 2, March 1998, pp. 345-356.
[21] Shepard, J.D., Power electronics futures - Applied Power Electronics
Conference and Exposition, 2004, APEC '04, Nineteenth Annual IEEE,
Volume 1, 2004, pp. 31-34.
[22] Mohan, N., Power Electronic Circuits: An Overview - Industrial Electronics
Society Proceedings, 14 Annual Conference of, Volume 3, October 1988,
pp. 522-527.
[23] Yu, Z., Mohammed, A., Panahi, I., A review of three PWM techniques -
American Control Conference, Proceedings of the 1997, 1997, pp. 257-261.
74
[24] Nabe, A. Takahashi, I. and Akagi, H. A New Neutral-Point Clamped PWM
Inverter, - IEEE Transactions on Industry Applications, volume 17, number 5,
1981, pp. 518-523.
[25] Mon, Y.Y., Keerthipala, W.W.L., San, T.L., Multi-modular multi-level pulse
width modulated inverters - Power System Technology, 2000. Proceedings.
PowerCon 2000. International Conference on, Volume 1, 2000, pp. 469-474.
[26] Carrara, G., Gardella, S., Marchesoni, M., Salutari, R., Sciutto, G., A new
multilevel PWM method: a theoretical analysis - Power Electronics, IEEE
Transactions on, Volume 7, Issue 3, July 1992, pp. 497-505.
75
76
BIOGRAPHICAL SKETCH
Lining Zhou was born in Hangzhou, China in November 1978. He received his
bachelor degree majored in Electrical Engineering from Shanghai Jiaotong University in
Shanghai, China in July 2001. He began his Masters study in the Department of Electrical
and Computer Engineering at the Florida State University in January 2004. He is a
research assistant at the Center for Advanced Power Systems (CAPS) of Florida State
University. His research is specialized in the fields of Power Electronics and Digital
Signal Processing.
Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Calculation of Short-Circuit CurrentsDocumento35 páginasCalculation of Short-Circuit CurrentsdaodoquangAinda não há avaliações
- Ect129 Uninterruptible Static Power Supplies and The Protection of PersonsDocumento44 páginasEct129 Uninterruptible Static Power Supplies and The Protection of PersonsMarko VujicaAinda não há avaliações
- Slaa 075Documento19 páginasSlaa 075Manidhar ParvatamAinda não há avaliações
- Ethernet IP Texas InstrumentsDocumento6 páginasEthernet IP Texas InstrumentsFranzKafkaAinda não há avaliações
- Uhc AwatersDocumento60 páginasUhc Awaterskammu9713Ainda não há avaliações
- IEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityDocumento7 páginasIEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityPhạm Văn TưởngAinda não há avaliações
- Tutorial Digital Control Loop DesignDocumento17 páginasTutorial Digital Control Loop DesignPhạm Văn TưởngAinda não há avaliações
- Direct Duty Cycle Control For MPPT Digital ImplementationDocumento5 páginasDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngAinda não há avaliações
- All About HarmonicsDocumento240 páginasAll About HarmonicsKhushal KharadeAinda não há avaliações
- AN296110 Current Sensing For Renewable EnergyDocumento4 páginasAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngAinda não há avaliações
- 309 An 09 Solar Panel PowerDocumento3 páginas309 An 09 Solar Panel PowerJoel Medina GuttiAinda não há avaliações
- IEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsDocumento9 páginasIEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsPhạm Văn TưởngAinda não há avaliações
- Control Intelligence Improves Renewable Energy EfficiencyDocumento7 páginasControl Intelligence Improves Renewable Energy EfficiencyPhạm Văn TưởngAinda não há avaliações
- C Programming For Embedded System Applications PDFDocumento54 páginasC Programming For Embedded System Applications PDFWendo David PesaAinda não há avaliações
- The Adventures of Huckleberry Finn by Mark TwainDocumento289 páginasThe Adventures of Huckleberry Finn by Mark TwainBooks100% (5)
- Disturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignDocumento10 páginasDisturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignPhạm Văn TưởngAinda não há avaliações
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocumento9 páginasUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngAinda não há avaliações
- An Improved PV Battery Charger For Low Cost Low PowerDocumento4 páginasAn Improved PV Battery Charger For Low Cost Low PowerPhạm Văn TưởngAinda não há avaliações
- A Novel Dynamic Var CompensatorDocumento4 páginasA Novel Dynamic Var CompensatorPhạm Văn TưởngAinda não há avaliações
- (Matsui) Sensorless PM Brushless DC Motor DrivesDocumento9 páginas(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngAinda não há avaliações
- Current-Transformer Phase-Shift Compensation and CalibrationDocumento7 páginasCurrent-Transformer Phase-Shift Compensation and CalibrationrsrtnjAinda não há avaliações
- 1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemsDocumento6 páginas1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemschethanAinda não há avaliações
- Informatics in Control Automation and RoboticsDocumento5 páginasInformatics in Control Automation and RoboticsPhạm Văn TưởngAinda não há avaliações
- Study of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuDocumento8 páginasStudy of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuPhạm Văn Tưởng100% (1)
- Inverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewDocumento6 páginasInverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewPhạm Văn TưởngAinda não há avaliações
- TW Exams Ielts How To Prepare Ielts TipsDocumento2 páginasTW Exams Ielts How To Prepare Ielts TipsHoda ElhadaryAinda não há avaliações
- NHSPE ReadingDocumento5 páginasNHSPE ReadingMohamed HanafiAinda não há avaliações
- Space Vector Modulation An IntroductionDocumento10 páginasSpace Vector Modulation An IntroductionJohan LinderAinda não há avaliações
- Phan Tich 1 Bai Task 2 by Ngoc BachDocumento4 páginasPhan Tich 1 Bai Task 2 by Ngoc BachPhạm Văn Tưởng100% (1)
- Academic Writing & IdentityDocumento218 páginasAcademic Writing & IdentityGustavo RegesAinda não há avaliações
- Elements of Ayurveda Daily Routine GuideDocumento1 páginaElements of Ayurveda Daily Routine GuideShivani GargAinda não há avaliações
- Figures of Speech ExplainedDocumento5 páginasFigures of Speech ExplainedDarenJayBalboa100% (1)
- Sexual & Reproductive Health of AdolocentsDocumento8 páginasSexual & Reproductive Health of AdolocentsSourav HossenAinda não há avaliações
- Nutritional support through feeding tubesDocumento76 páginasNutritional support through feeding tubesKryzza LeizellAinda não há avaliações
- Security Testing MatDocumento9 páginasSecurity Testing MatLias JassiAinda não há avaliações
- Gregory University Library Assignment on Qualities of a Reader Service LibrarianDocumento7 páginasGregory University Library Assignment on Qualities of a Reader Service LibrarianEnyiogu AbrahamAinda não há avaliações
- The Clàsh The 0nly Band That MatteredDocumento255 páginasThe Clàsh The 0nly Band That MatteredNikos VaxevanidisAinda não há avaliações
- EDIBLE VACCINES: A COST-EFFECTIVE SOLUTIONDocumento21 páginasEDIBLE VACCINES: A COST-EFFECTIVE SOLUTIONPritish SareenAinda não há avaliações
- Ultimate Guide To Construction SubmittalsDocumento10 páginasUltimate Guide To Construction SubmittalsDavid ConroyAinda não há avaliações
- Arts9 q4 Mod1 Theatricalforms v5Documento30 páginasArts9 q4 Mod1 Theatricalforms v5Harold RicafortAinda não há avaliações
- Bolt Jul 201598704967704 PDFDocumento136 páginasBolt Jul 201598704967704 PDFaaryangargAinda não há avaliações
- Digitrip 520Documento40 páginasDigitrip 520HACAinda não há avaliações
- DBIRS SyllabusDocumento2 páginasDBIRS SyllabusAshitosh KadamAinda não há avaliações
- Ex 2 6 FSC Part2 Ver3Documento16 páginasEx 2 6 FSC Part2 Ver3Usama TariqAinda não há avaliações
- Journal 082013Documento100 páginasJournal 082013Javier Farias Vera100% (1)
- Samuel Vizcaino: Professional ProfileDocumento3 páginasSamuel Vizcaino: Professional ProfileVizcaíno SamuelAinda não há avaliações
- Videocon ProjectDocumento54 páginasVideocon ProjectDeepak AryaAinda não há avaliações
- Litz Wire Termination GuideDocumento5 páginasLitz Wire Termination GuideBenjamin DoverAinda não há avaliações
- Soft StarterDocumento6 páginasSoft StarterEric Maglinte TolosaAinda não há avaliações
- Filler SlabDocumento4 páginasFiller Slabthusiyanthanp100% (1)
- Neural Network For PLC PDFDocumento7 páginasNeural Network For PLC PDFMarcelo Moya CajasAinda não há avaliações
- 04 LimeDocumento32 páginas04 LimeGoogle user100% (1)
- Oreilly Design For Voice InterfacesDocumento37 páginasOreilly Design For Voice InterfacesHarmony JordenAinda não há avaliações
- Ir Pc-1: Pre-Check (PC) Design Criteria For Freestanding Signs and Scoreboards: 2019 CBCDocumento15 páginasIr Pc-1: Pre-Check (PC) Design Criteria For Freestanding Signs and Scoreboards: 2019 CBCAbrar AhmadAinda não há avaliações
- Unitisation of Legal Methodsalsdkgh GHNJFKL A SDFG LKJH Asdfgf Lkjhasdfg LKKJ Asdfg LKJH A Slkjfs Aaaaaaaaaaaaslkdfj Asldkjf SLDKFJDocumento3 páginasUnitisation of Legal Methodsalsdkgh GHNJFKL A SDFG LKJH Asdfgf Lkjhasdfg LKKJ Asdfg LKJH A Slkjfs Aaaaaaaaaaaaslkdfj Asldkjf SLDKFJKailashnath Reddy AjjuguttuAinda não há avaliações
- S4 - SD - HOTS in Practice - EnglishDocumento65 páginasS4 - SD - HOTS in Practice - EnglishIries DanoAinda não há avaliações
- Intelligent Transportation System SolutionsDocumento38 páginasIntelligent Transportation System SolutionsWisnu AjiAinda não há avaliações
- Journal Sleep Walking 1Documento7 páginasJournal Sleep Walking 1Kita SemuaAinda não há avaliações
- Digital MarketingDocumento70 páginasDigital MarketingTarun N. O'Brain Gahlot0% (2)