Você também pode gostar
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Open Pit Design & Scheduling - I.T Solution For Longterm Mine PlanningDocumento18 páginasOpen Pit Design & Scheduling - I.T Solution For Longterm Mine Planningarief_7Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- A MPI Parallel Algorithm For The Maximum Flow ProblemDocumento4 páginasA MPI Parallel Algorithm For The Maximum Flow ProblemGRUNDOPUNKAinda não há avaliações
- On The Change-Of-Support Problem For Areal Data A Geostatistical Inverse Modeling ApproachDocumento1 páginaOn The Change-Of-Support Problem For Areal Data A Geostatistical Inverse Modeling ApproachGRUNDOPUNKAinda não há avaliações
- A Model Base Based Grid Workflow Expertise Logical Validation Solution For Quantitative Remote Sensing RetrievalDocumento6 páginasA Model Base Based Grid Workflow Expertise Logical Validation Solution For Quantitative Remote Sensing RetrievalGRUNDOPUNKAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Ericsson Review Vol 65 1988 3Documento52 páginasEricsson Review Vol 65 1988 3fantasy247Ainda não há avaliações
- Iec61850 PLCDocumento2 páginasIec61850 PLCzaidisofianAinda não há avaliações
- IEC TC57 Substation Configuration Language SummaryDocumento13 páginasIEC TC57 Substation Configuration Language Summarykass_ecsAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Lecture - 1Documento47 páginasLecture - 1Manzu PokharelAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- How To Build A SupercomputerDocumento8 páginasHow To Build A SupercomputerAravind IlangoAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- OMRON Sysmac C-SeriesDocumento174 páginasOMRON Sysmac C-SerieseddieipenzaAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
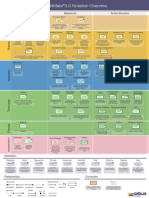
- Archimate 3 Poster Detailed OverviewDocumento1 páginaArchimate 3 Poster Detailed OverviewJuan100% (1)
- WIR 1186 RobokitsIndiaDocumento14 páginasWIR 1186 RobokitsIndiatushaar vishnuAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- CRBT PresentationDocumento11 páginasCRBT PresentationEithu ThutunAinda não há avaliações
- Indra-Garex 220 0 PDFDocumento2 páginasIndra-Garex 220 0 PDFFathony Ilham100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Basics of Information Technology: A. Multiple Choice QuestionsDocumento4 páginasBasics of Information Technology: A. Multiple Choice QuestionsBeena Mathew50% (2)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Iec 104 Master ConfigurationDocumento78 páginasIec 104 Master ConfigurationMauro MartinsAinda não há avaliações
- Distributed System: Prepared By: Joem F. GutierrezDocumento28 páginasDistributed System: Prepared By: Joem F. GutierrezJoem GutierrezAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- (OptiX OSN 8800) Communication Between The NCE and A GNE FailsDocumento4 páginas(OptiX OSN 8800) Communication Between The NCE and A GNE FailsSery ArthurAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Ovation I/O: FeaturesDocumento5 páginasOvation I/O: FeaturesNguyễn Quang HiệpAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- CS8591 - CN Session 2Documento13 páginasCS8591 - CN Session 2pavethramaniAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- TW QFabric TrafficFlowsDocumento82 páginasTW QFabric TrafficFlowsAlaa Al-saggafAinda não há avaliações
- AVIAT Eclipse and WTM6000 Training Course: Huawei Technologies Co., LTDDocumento60 páginasAVIAT Eclipse and WTM6000 Training Course: Huawei Technologies Co., LTDEmoka KingsleyAinda não há avaliações
- Solarwinds: Network Topology Mapper Administrator GuideDocumento70 páginasSolarwinds: Network Topology Mapper Administrator GuideLuis Abdon Diaz ParraAinda não há avaliações
- ICT 3040Y Group Network Assignment Semester 2 2020-2021Documento4 páginasICT 3040Y Group Network Assignment Semester 2 2020-2021Abhishek GobinAinda não há avaliações
- Chapter 6-1 - Network Components (Hubs - Repeaters)Documento13 páginasChapter 6-1 - Network Components (Hubs - Repeaters)Afendey ArthurAinda não há avaliações
- Robot Communication GuideDocumento14 páginasRobot Communication GuideOm Indra Nugraha100% (1)
- CBSE Class 12 Informatic Practices Computer Networking PDFDocumento38 páginasCBSE Class 12 Informatic Practices Computer Networking PDFHimanshu SekharAinda não há avaliações
- 12 IP Question BankDocumento92 páginas12 IP Question BankVandana DulaniAinda não há avaliações
- Computing EnvironmentsDocumento24 páginasComputing EnvironmentsVinit SiriahAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Intent Based Campus Fabrics Software Defined Access White Paper by ForfusionDocumento11 páginasIntent Based Campus Fabrics Software Defined Access White Paper by ForfusionGenus SumAinda não há avaliações
- Catalogo CLK Upgrade - V1 PDFDocumento2 páginasCatalogo CLK Upgrade - V1 PDFSergio Eu CaAinda não há avaliações
- SPINE 1.3 DocumentationDocumento69 páginasSPINE 1.3 DocumentationVangelis Bob SimopoulosAinda não há avaliações
- Solutions Series: Using System Data SynchronizationDocumento47 páginasSolutions Series: Using System Data SynchronizationCristhian HaroAinda não há avaliações
- 3G Node B Solutions For UP (West) : For Internal Use Only 2 © Nokia Siemens NetworksDocumento97 páginas3G Node B Solutions For UP (West) : For Internal Use Only 2 © Nokia Siemens Networksrakesh012Ainda não há avaliações