Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Bioethanol Technology PDFDocumento16 páginasBioethanol Technology PDFMd. Saimon IslamAinda não há avaliações
- Pitting and Crevice CorrosionDocumento37 páginasPitting and Crevice CorrosionMd. Saimon IslamAinda não há avaliações
- Environmentally Assisted Cracking - Corrsion CourseDocumento39 páginasEnvironmentally Assisted Cracking - Corrsion CourseMd. Saimon IslamAinda não há avaliações
- Corrosion Engineering - Chapter 5 - Polarization Methods Danny A JonesDocumento19 páginasCorrosion Engineering - Chapter 5 - Polarization Methods Danny A JonesMd. Saimon IslamAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Optimum Policy ControlDocumento4 páginasOptimum Policy ControlKimberly VargasAinda não há avaliações
- Susan Abed (2012) - Corporate Governance and Earnings Management Jordanian EvidenceDocumento10 páginasSusan Abed (2012) - Corporate Governance and Earnings Management Jordanian Evidenceheryp123Ainda não há avaliações
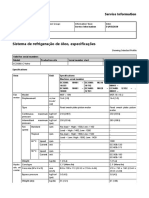
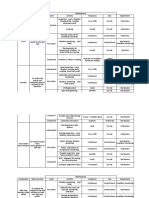
- Sistema de Refrigeração de Óleo, EspecificaçõesDocumento2 páginasSistema de Refrigeração de Óleo, EspecificaçõesAlexandreAinda não há avaliações
- Nadella Cam Follower PF810EDocumento22 páginasNadella Cam Follower PF810EAldair MezaAinda não há avaliações
- An Ecient Uniform-Cost Normalized Edit Distance AlgorithmDocumento12 páginasAn Ecient Uniform-Cost Normalized Edit Distance Algorithmanon-75650Ainda não há avaliações
- Chapter6b-Combinational Logic Design PracticesDocumento38 páginasChapter6b-Combinational Logic Design PracticesZulkarnineAinda não há avaliações
- RO400FC RO300FC Specifications - V3.2Documento6 páginasRO400FC RO300FC Specifications - V3.2bogdantn98Ainda não há avaliações
- BXE Experiment No.3Documento8 páginasBXE Experiment No.3DsgawaliAinda não há avaliações
- Firetroll User Interface Manual Ns550f-01-Instruction-manualDocumento16 páginasFiretroll User Interface Manual Ns550f-01-Instruction-manualMike CerreroAinda não há avaliações
- List NotesDocumento27 páginasList NotesMohit MauryaAinda não há avaliações
- Mathematics (0580/13) October/November 2019Documento12 páginasMathematics (0580/13) October/November 2019kdebipershadAinda não há avaliações
- Intro 4 - Substantive Concepts: Description Remarks and Examples References Also SeeDocumento19 páginasIntro 4 - Substantive Concepts: Description Remarks and Examples References Also SeeAntonella PetrilloAinda não há avaliações
- S1Agile EN RN I.1 PDFDocumento10 páginasS1Agile EN RN I.1 PDFCorey PorterAinda não há avaliações
- PDPP - Presentation.3.Concurrent. Engineering - January.2021Documento17 páginasPDPP - Presentation.3.Concurrent. Engineering - January.2021Ashish KumarAinda não há avaliações
- CG Mod 3Documento51 páginasCG Mod 3Misba nausheenAinda não há avaliações
- Astm B695-04-2009Documento6 páginasAstm B695-04-2009Danny TriwibowoAinda não há avaliações
- Buffer SolutionDocumento6 páginasBuffer SolutionAdrija MandalAinda não há avaliações
- Flexible Perovskite Solar CellsDocumento31 páginasFlexible Perovskite Solar CellsPEDRO MIGUEL SOLORZANO PICONAinda não há avaliações
- CS405PC JP Unit-3Documento44 páginasCS405PC JP Unit-3MEGHANA 3Ainda não há avaliações
- About Planets - Vaishali's ProjectDocumento3 páginasAbout Planets - Vaishali's ProjectRaj KumarAinda não há avaliações
- G3600 A4 Brochures PDFDocumento4 páginasG3600 A4 Brochures PDFVictor NunezAinda não há avaliações
- BM2 24H+Installation+InstructionsDocumento7 páginasBM2 24H+Installation+InstructionsremediospereiraAinda não há avaliações
- FluidsDocumento10 páginasFluidslara alghamdiAinda não há avaliações
- Maintenance Component Main Function Level Activity Frequency Line DepartmentDocumento7 páginasMaintenance Component Main Function Level Activity Frequency Line DepartmentBarathAinda não há avaliações
- Punching Shear PDFDocumento13 páginasPunching Shear PDFmohamedadel100Ainda não há avaliações
- Standarization of Volumetric SolutionsDocumento9 páginasStandarization of Volumetric SolutionsZahid IqbalAinda não há avaliações
- Satellite Communication Module 4Documento34 páginasSatellite Communication Module 4JKAinda não há avaliações
- Maquinaria Forestal..Documento14 páginasMaquinaria Forestal..Juan G ContrerasAinda não há avaliações
- 1 Priority KeywordDocumento8 páginas1 Priority KeywordKavithaAinda não há avaliações
- Ns 3 TutorialDocumento105 páginasNs 3 TutorialparabavireoAinda não há avaliações