Você também pode gostar
- Load Test On Three Phase Induction Motor: Experiment No: 1Documento4 páginasLoad Test On Three Phase Induction Motor: Experiment No: 1Bodhayan PrasadAinda não há avaliações
- AC Voltage Controller: Shahid IqbalDocumento39 páginasAC Voltage Controller: Shahid IqbalZack ZoldyckAinda não há avaliações
- Electric Drives by GK Dubey PDFDocumento54 páginasElectric Drives by GK Dubey PDFTana Azeez100% (1)
- Speed Control of Three Phase Slip Ring Induction Motor at Variable Load ConditionDocumento3 páginasSpeed Control of Three Phase Slip Ring Induction Motor at Variable Load Conditionhi100% (1)
- Energy Audit Lab Experiments GuideDocumento23 páginasEnergy Audit Lab Experiments GuideNayandeep Gulhane100% (1)
- Chapter 15.1.2.3 DC Drives PPT II Spring 2012Documento56 páginasChapter 15.1.2.3 DC Drives PPT II Spring 2012Muhammad Saqib Noor Ul IslamAinda não há avaliações
- Special Electrical Machines Ee2403 PDFDocumento16 páginasSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- DC Machine Example ProblemsDocumento4 páginasDC Machine Example ProblemsFemi Prince0% (1)
- Chapter 3-1.power Flow Solution-Gauss SeidelDocumento33 páginasChapter 3-1.power Flow Solution-Gauss Seidelfvijayami100% (1)
- Single Phase Rectifier Fed DC Motor DriveDocumento11 páginasSingle Phase Rectifier Fed DC Motor DriveNitesh kumar singh100% (1)
- Brake Test On 3 Phase Slip Ring Induction MotorDocumento5 páginasBrake Test On 3 Phase Slip Ring Induction MotorRajeev Sai0% (1)
- Chapter - 4: Synchronous Motor DrivesDocumento16 páginasChapter - 4: Synchronous Motor DrivesSuganthiVasan67% (3)
- Exp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkDocumento5 páginasExp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkSnehil ChandraAinda não há avaliações
- Electrical Machines Lab QuestionsDocumento2 páginasElectrical Machines Lab Questionskarthikeyan75% (4)
- Synchronous Motor Drive Control MethodsDocumento17 páginasSynchronous Motor Drive Control MethodssidharthAinda não há avaliações
- Experiment 1-2 Three-Phase Half Controlled Converter PDFDocumento2 páginasExperiment 1-2 Three-Phase Half Controlled Converter PDFRAJENDRA KUMAWATAinda não há avaliações
- 6-Solved Problem - Unit TwoDocumento26 páginas6-Solved Problem - Unit Twoعلي قاسم الموسوي100% (1)
- Lecture 03 - CycloconvertersDocumento29 páginasLecture 03 - CycloconvertersdaudiAinda não há avaliações
- UNIT-V-Synchronous MachinesDocumento51 páginasUNIT-V-Synchronous Machinessujith100% (1)
- Speed Control of DC Shunt MotorDocumento6 páginasSpeed Control of DC Shunt MotorSubham Basu100% (4)
- Chapter Thirteen: DC Drives Using Controlled RectifiersDocumento38 páginasChapter Thirteen: DC Drives Using Controlled Rectifiersyemane gebremichal100% (2)
- Determine synchronous machine impedancesDocumento5 páginasDetermine synchronous machine impedancesarjuna4306Ainda não há avaliações
- 2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control MethodDocumento4 páginas2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control Methodbhavesh1863100% (1)
- REGULATION TESTING OF SYNCHRONOUS MACHINESDocumento10 páginasREGULATION TESTING OF SYNCHRONOUS MACHINESAbhishEk Singh67% (3)
- Synchronizing 3-Phase AlternatorDocumento5 páginasSynchronizing 3-Phase AlternatorHaritha RkAinda não há avaliações
- Load Test On DC Shunt MotorDocumento6 páginasLoad Test On DC Shunt MotorsanjuAinda não há avaliações
- Chapter 6: Speed Control of Conventional and Brushless Direct Current MotorsDocumento26 páginasChapter 6: Speed Control of Conventional and Brushless Direct Current MotorsRenan Yui Hebita100% (1)
- Unit 3 - DC - MotorDocumento39 páginasUnit 3 - DC - MotordhoniAinda não há avaliações
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocumento15 páginasElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraAinda não há avaliações
- Chapter 6 - Synchronous Motors PDFDocumento23 páginasChapter 6 - Synchronous Motors PDFYousab CreatorAinda não há avaliações
- AC Voltage Controllers: AC To Ac ConvertersDocumento25 páginasAC Voltage Controllers: AC To Ac ConvertersPhạm Hữu Kỳ0% (1)
- Basic Principles of Electrical MachinesDocumento1 páginaBasic Principles of Electrical MachinesPeter Favour80% (5)
- Power Electronics Controlled RectificationDocumento13 páginasPower Electronics Controlled Rectificationkibrom atsbhaAinda não há avaliações
- PSOC PPT For All UnitsDocumento73 páginasPSOC PPT For All Unitsswamy koduriAinda não há avaliações
- Lecture 14 Chopper Fed DC DrivesDocumento6 páginasLecture 14 Chopper Fed DC DrivesNadjAinda não há avaliações
- Ch7 Corona SyllabusDocumento20 páginasCh7 Corona SyllabusAbhishek Maurya100% (1)
- Electric Drives Control DC MotorsDocumento5 páginasElectric Drives Control DC MotorsKarthikeyan Govindaraj100% (3)
- Electrical Machines and Drives Year Question PaperDocumento2 páginasElectrical Machines and Drives Year Question PapersivaeinfoAinda não há avaliações
- Speed Control of DC Shunt MotorDocumento7 páginasSpeed Control of DC Shunt MotorAakash0% (1)
- Unit - 2 Optimal Design of DC Machine Unit-02/Lecture-01Documento31 páginasUnit - 2 Optimal Design of DC Machine Unit-02/Lecture-01madeehaAinda não há avaliações
- MC Murray InverterDocumento92 páginasMC Murray InverterGnanaseharan Arunachalam100% (5)
- BEEE Important Questions 16 MarksDocumento5 páginasBEEE Important Questions 16 Marksaeroheroz25% (4)
- Solution of Midterm Exam 322E Power Transmission Syst Spring 2009Documento13 páginasSolution of Midterm Exam 322E Power Transmission Syst Spring 2009Aslı ÇakırAinda não há avaliações
- Retardation TestDocumento53 páginasRetardation Testkiran_y2100% (9)
- Tutorial EDDocumento10 páginasTutorial EDPavan KhetrapalAinda não há avaliações
- Questions & Answers On Synchronous MotorsDocumento28 páginasQuestions & Answers On Synchronous Motorskibrom atsbha100% (1)
- 11.viva Voce QuestionsDocumento3 páginas11.viva Voce Questionsarwin0% (1)
- D.C Motor StarterDocumento4 páginasD.C Motor Starterkarthime0857% (7)
- Sem QuestionsDocumento11 páginasSem QuestionsRojaAinda não há avaliações
- Experiment No 5 The DC Series MotorDocumento6 páginasExperiment No 5 The DC Series MotorMadel Roque50% (2)
- DC Motors Speed Control - ModDocumento9 páginasDC Motors Speed Control - ModAnuja VargheseAinda não há avaliações
- MA-415 Industrial Drives Lab IndexDocumento19 páginasMA-415 Industrial Drives Lab IndexMayankJainAinda não há avaliações
- Load test on single phase induction motorDocumento3 páginasLoad test on single phase induction motorthemes3x67% (3)
- EE6504 Electrical Machines-II (2 Mark Q & A) PDFDocumento16 páginasEE6504 Electrical Machines-II (2 Mark Q & A) PDFUnknownAinda não há avaliações
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocumento14 páginasAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARAinda não há avaliações
- EE2259 -- ELECTRICAL MACHINES LABORATORY – I SYLLABUSDocumento99 páginasEE2259 -- ELECTRICAL MACHINES LABORATORY – I SYLLABUSPrakash Chandran CAinda não há avaliações
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocumento6 páginasExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalAinda não há avaliações
- DC Shunt Motor Speed Control by Field & Armature MethodsDocumento4 páginasDC Shunt Motor Speed Control by Field & Armature MethodsVaibhavAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Description: Technical DataDocumento17 páginasDescription: Technical DataDhivya NAinda não há avaliações
- RX Family: User's Manual: Software Renesas 32-Bit Mcu RX FamilyDocumento278 páginasRX Family: User's Manual: Software Renesas 32-Bit Mcu RX FamilyDhivya NAinda não há avaliações
- The MOS TransistorDocumento49 páginasThe MOS TransistorLauraPiccinnoAinda não há avaliações
- Main Features: - Set-Top-Boxes - White Goods - Home Appliances - DVD Players and VcrsDocumento25 páginasMain Features: - Set-Top-Boxes - White Goods - Home Appliances - DVD Players and VcrsDhivya NAinda não há avaliações
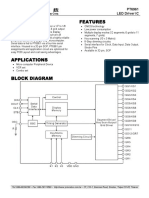
- Description Features: PT6967 LED Driver ICDocumento22 páginasDescription Features: PT6967 LED Driver ICDhivya NAinda não há avaliações
- Description Features: PT6961 LED Driver ICDocumento18 páginasDescription Features: PT6961 LED Driver ICDhivya NAinda não há avaliações
- Description Features: PT6964 LED Driver ICDocumento15 páginasDescription Features: PT6964 LED Driver ICDhivya NAinda não há avaliações
- LCD-TFT Display Controller (LTDC) On STM32 MCUsDocumento91 páginasLCD-TFT Display Controller (LTDC) On STM32 MCUsamirmoh1992100% (1)
- Daq Ni Usb 6009Documento30 páginasDaq Ni Usb 6009ramiro_vicente_6Ainda não há avaliações
- Scan Docs Fast CamScanner AppDocumento2 páginasScan Docs Fast CamScanner AppDhivya NAinda não há avaliações
- STLED316S: Serial-Interfaced 6-Digit LED Controller With KeyscanDocumento33 páginasSTLED316S: Serial-Interfaced 6-Digit LED Controller With KeyscanDhivya NAinda não há avaliações
- Harmonics in Power Quality IssuesDocumento19 páginasHarmonics in Power Quality IssuesthomaswynnAinda não há avaliações
- Assignment 3Documento2 páginasAssignment 3Dhivya NAinda não há avaliações
- LCD-TFT Display Controller (LTDC) On STM32 MCUsDocumento91 páginasLCD-TFT Display Controller (LTDC) On STM32 MCUsamirmoh1992100% (1)
- Design and Implementation of Single-Phase Hybrid Active Power Filter Controller-LibreDocumento5 páginasDesign and Implementation of Single-Phase Hybrid Active Power Filter Controller-LibreDhivya NAinda não há avaliações
- Core Architecture:: Container BasedDocumento3 páginasCore Architecture:: Container BasedDhivya NAinda não há avaliações
- 2013 Arduino PID Lab 0Documento7 páginas2013 Arduino PID Lab 0Uma MageshwariAinda não há avaliações
- B.E. (Hons.) Electrical & Electronics: List of Discipline Core Courses: S. No. Course No. Course Title L P UDocumento4 páginasB.E. (Hons.) Electrical & Electronics: List of Discipline Core Courses: S. No. Course No. Course Title L P UDhivya NAinda não há avaliações
- Electrical EngineeringDocumento2 páginasElectrical EngineeringSantosh SandyAinda não há avaliações
- StringsDocumento6 páginasStringsDhivya NAinda não há avaliações
- Stacks and QueuesDocumento21 páginasStacks and QueuesDhivya NAinda não há avaliações
- Theoretical Study On Active FiltersDocumento2 páginasTheoretical Study On Active FiltersDhivya NAinda não há avaliações
- Resume Preparation Do's and Don'ts: Amrita Vishwa Vidyapeetham 2014Documento6 páginasResume Preparation Do's and Don'ts: Amrita Vishwa Vidyapeetham 2014Dhivya NAinda não há avaliações
- Sorting AlgorithmsDocumento17 páginasSorting AlgorithmsBilo BiloAinda não há avaliações
- Indian Electricity Act 2003Documento67 páginasIndian Electricity Act 2003Dhivya NAinda não há avaliações
- Design of Active Harmonic Filter For A 3Documento10 páginasDesign of Active Harmonic Filter For A 3Dhivya NAinda não há avaliações
- L01 ComputerSystemAnatomyDocumento14 páginasL01 ComputerSystemAnatomyDhivya NAinda não há avaliações
- Soil AnalysisDocumento13 páginasSoil AnalysisDhivya NAinda não há avaliações
- Core Architecture:: Container BasedDocumento3 páginasCore Architecture:: Container BasedDhivya NAinda não há avaliações
- Motherboard The Common MOSFET (FET) Substitution TableDocumento3 páginasMotherboard The Common MOSFET (FET) Substitution TableDhruv Gonawala100% (3)
- HPK 225 PDFDocumento2 páginasHPK 225 PDFRonak RanaAinda não há avaliações
- Preliminary: 01/05/2023 1.0E Initial Version Published. Package FPG676A SupportedDocumento44 páginasPreliminary: 01/05/2023 1.0E Initial Version Published. Package FPG676A SupportedJOSE FRANÇAAinda não há avaliações
- Here We Are Building A Wireless FM Transmitter Which Uses RF Communication To Transmit The Medium or Low Power FM SignalDocumento6 páginasHere We Are Building A Wireless FM Transmitter Which Uses RF Communication To Transmit The Medium or Low Power FM SignalsravanAinda não há avaliações
- Course "EEM 2 DC Machines": WWW - Lucas-Nuelle - deDocumento17 páginasCourse "EEM 2 DC Machines": WWW - Lucas-Nuelle - desifuszAinda não há avaliações
- Mufollowerdistortion PDFDocumento8 páginasMufollowerdistortion PDFDirk SloosAinda não há avaliações
- Digital Meter: KIT No: 0349 307 620Documento6 páginasDigital Meter: KIT No: 0349 307 620Garlin MunarAinda não há avaliações
- Transformer PolarityDocumento10 páginasTransformer PolarityMizhar GerardoAinda não há avaliações
- Amplifier Card For Valve With Feedback UEIK 11RSDocumento4 páginasAmplifier Card For Valve With Feedback UEIK 11RSLibin100% (1)
- Wk1 - No Load - DC Shunt WoundDocumento5 páginasWk1 - No Load - DC Shunt WoundChattha GAinda não há avaliações
- Standard EIA RESISTOR SMD CODEDocumento3 páginasStandard EIA RESISTOR SMD CODEWatu MetrosAinda não há avaliações
- PPT Industrijska pneumatika Solenoids ManufacturerDocumento15 páginasPPT Industrijska pneumatika Solenoids ManufacturerSlobodan SavicAinda não há avaliações
- Item 6.2 - 560PSU01 - DS - enDocumento4 páginasItem 6.2 - 560PSU01 - DS - enTiennghia BuiAinda não há avaliações
- Power IC L9132Documento1 páginaPower IC L9132felix100% (1)
- Testing 320 KV XLPE HVDC CableDocumento7 páginasTesting 320 KV XLPE HVDC CableA. HassanAinda não há avaliações
- GL-R44H DatasheetDocumento3 páginasGL-R44H Datasheetrizky nurmansyahAinda não há avaliações
- Airtec Pneumatic ValveDocumento9 páginasAirtec Pneumatic ValveArif BinorikaAinda não há avaliações
- Auto Reclose TestingDocumento2 páginasAuto Reclose TestingSanjin Čamur100% (1)
- CWM8 5 D Information SheetDocumento1 páginaCWM8 5 D Information SheetBalder LambertAinda não há avaliações
- Ficha Técnica Interruptores TermomagnéticosDocumento4 páginasFicha Técnica Interruptores TermomagnéticosJosé IturvideAinda não há avaliações
- 2.1 Invertec V200 - T PDFDocumento2 páginas2.1 Invertec V200 - T PDFCarlos PadillaAinda não há avaliações
- Installation Instructions 7639039 7639040 Mixer ExtensionDocumento32 páginasInstallation Instructions 7639039 7639040 Mixer ExtensionB0gdanAinda não há avaliações
- Chap04 (12 21 06) PDFDocumento66 páginasChap04 (12 21 06) PDFHassan FarssiAinda não há avaliações
- Masteroppgave PDFDocumento104 páginasMasteroppgave PDFbacuoc.nguyen356Ainda não há avaliações
- Tsm2n60 N Channel Power Mosfet 600v 5ohm 2a 70wDocumento9 páginasTsm2n60 N Channel Power Mosfet 600v 5ohm 2a 70wbookreader1968Ainda não há avaliações
- Power SelguideDocumento56 páginasPower SelguideFrancisco Wilson Bezerra FranciscoAinda não há avaliações
- KTD1624Documento4 páginasKTD1624ricardo_MassisAinda não há avaliações
- Schmitt TriggerDocumento4 páginasSchmitt TriggerHassan M KhanAinda não há avaliações
- Unit7-DC MotorsDocumento40 páginasUnit7-DC MotorsNAVNEET GUPTAAinda não há avaliações
- PanasonicDocumento26 páginasPanasonicmecatronic22Ainda não há avaliações