Escolar Documentos
Profissional Documentos
Cultura Documentos
Técnicas de Compensação Dinâmica para Sistemas Lineares Com Saturação de Controle
Enviado por
marcelo24845Título original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Técnicas de Compensação Dinâmica para Sistemas Lineares Com Saturação de Controle
Enviado por
marcelo24845Direitos autorais:
Formatos disponíveis
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL
ESCOLA DE ENGENHARIA
DEPARTAMENTO DE ENGENHARIA ELTRICA
ENGENHARIA ELTRICA
FERNANDO AUGUSTO BENDER
TCNICAS DE COMPENSAO
DINMICA PARA SISTEMAS
LINEARES COM SATURAO DE
CONTROLE
Porto Alegre
2006
FERNANDO AUGUSTO BENDER
TCNICAS DE COMPENSAO
DINMICA PARA SISTEMAS
LINEARES COM SATURAO DE
CONTROLE
Dissertao de mestrado apresentada ao Programa
de Ps-Graduao em Engenharia Eltrica da Uni-
versidade Federal do Rio Grande do Sul como
parte dos requisitos para a obteno do ttulo de
Mestre em Engenharia Eltrica.
rea de concentrao: Automao e Instrumenta-
o Eletro-Eletrnica
ORIENTADOR: Prof. Dr. Joo Manoel Gomes
da Silva Jr
Porto Alegre
2006
FERNANDO AUGUSTO BENDER
TCNICAS DE COMPENSAO
DINMICA PARA SISTEMAS
LINEARES COM SATURAO DE
CONTROLE
Esta dissertao foi julgada adequada para a ob-
teno do ttulo de Mestre em Engenharia Eltrica
e aprovada em sua forma nal pelo Orientador e
pela Banca Examinadora.
Orientador:
Prof. Dr. Joo Manoel Gomes da Silva Jr, UFRGS
Doutor pela Universit Paul Sabatier de Toulouse Toulouse,
Frana
Banca Examinadora:
Prof. Dr. Sophie Tarbouriech, LAAS
Doutor pela Universit Paul Sabatier de Toulouse Toulouse, Frana
Prof. Dr. Eugnio de Bona Castelan Neto, UFSC
Doutor pela Universit Paul Sabatier de Toulouse Toulouse, Frana
Prof. Dr. Daniel Ferreira Coutinho, PUCRS
Doutor pela Universidade Federal de Santa Catarina Florianpolis, Brasil
Prof. Dr. Romeu Reginatto, UFRGS
Doutor pela Universidade Federal de Santa Catarina Florianpolis, Brasil
Coordenador do PPGEE:
Prof. Dr. Marcelo S. Lubaszewski
Porto Alegre, Abril de 2006.
DEDICATRIA
Aos bravos da Ponte Mlvio esta humilde lembrana.
AGRADECIMENTOS
innita compreenso dos que me cercam.
ateno dos que me ouvem.
bondade de quem me ensina.
Ao valor dos que admiro.
Ao amor da minha famlia.
beleza ingnua do Sol e da Lua.
RESUMO
Esta dissertao aborda a sntese de leis de controle baseadas em compensao din-
mica de sada para sistemas lineares contnuos invariantes no tempo, sujeitos a restries
no atuador. Baseados em condies sucientes expressas em LMIs, obtidas a partir de
uma nova condio de setor para a funo zona-morta, dois mtodos so propostos. O
primeiro mtodo prope a sntese de compensadores dinmicos de anti-windup de ordem
plena e reduzida para um sistema com um controlador dado a priori desprezando limites
do atuador. A sntese dos compensadores considera um atuador restrito em amplitude
e o sistema sujeito a perturbaes limitadas em norma L
2
. A vericao das condies
enunciadas garante a estabilidade da origem em malha fechada, ganho L
2
limitado da
perturbao sada controlada do sistema, e um conjunto de inicializao dos estados do
sistema tolerante perturbao de norma L
2
mxima, conhecida. Na ausncia de per-
turbao a origem garantida assintoticamente estvel. Para o compensador de ordem
plena, condies em LMIs garantem a estabilidade local e global da origem. Para o caso
de ordem reduzida, inicialmente obtm-se estas condies expressas em termos de BMIs,
sobre as quais aplica-se o Lema de Finsler, e pela escolha apropriada de seus multiplica-
dores, condies expressas em LMIs so obtidas. Dois mtodos baseados em BMIs so
propostos para estender os resultados obtidos das otimizaes, em esquemas de relaxao.
Osegundo mtodo proposto aborda a sntese de controladores dinmicos, para umatu-
ador restrito em amplitude e taxa de variao, sujeito a perturbaes limitadas em norma
L
2
. Prope-se um controlador dinmico no-linear, composto por um compensador di-
nmico linear, um integrador saturante e laos anti-windup. Esta metodologia possibilita
a sntese simultnea de um controlador, e da malha de compensao anti-windup. A ve-
ricao das condies enunciadas garante a estabilidade da origem em malha fechada,
ganho L
2
limitado da perturbao sada controlada do sistema, e um conjunto de inicia-
lizao do sistema tolerante perturbao de norma L
2
mxima, conhecida. Na ausncia
de perturbao a origem garantida assintoticamente estvel. As condies para estabili-
dade local e global so formuladas em LMIs a partir da aplicao do lema de Finsler e da
escolha apropriada de multiplicadores. Dois mtodos tambm baseados em BMIs podem
estender os resultados obtidos das otimizaes em esquemas de relaxao. Casos especi-
ais so propostos a partir do mtodo geral obtido; nestes casos condies diretamente em
LMI podem ser obtidas.
Problemas de otimizao so propostos para ambos os mtodos para maximizar a
tolerncia perturbao e a minimizao do ganho L
2
da perturbao sada controlada.
Exemplos numricos so apresentados para ilustrar o efeito de cada mtodo na soluo
do problema de mxima tolerncia perturbao.
Palavras-chave: Antiwindup, Saturao, Sistemas Lineares, Tempo Contnuo.
ABSTRACT
This thesis addresses control law synthesis based upon dynamic output compensa-
tion of continuous time invariant linear systems. By sufcient conditions expressed in
LMIs, obtained from a new sector condition to the dead-zone function, two methods are
proposed. The rst one, comprises the synthesis of full and reduced order dynamic anti-
windup compensators for a system with a linear controller a priori given, regardless the
actuators limits. The compensator synthesis considers an amplitude limited actuator and
a system subjected to L
2
-norm limited perturbation. The verication of the announced
conditions assures the closed-loop origin stability, limited L
2
gain for the perturbation at
the system controlled output, and a system states initialization set tolerating the known
L
2
-norm disturbance. In the absence of disturbance the origin is asymptotically stable
guaranteed. For the full-order compensator, LMI conditions assure the local and global
origin closed-loop stability. For the reduced order case, at rst, BMI conditions are ob-
tained, which, by the Finsler Lemma and proper choosing of its multipliers, become LMIs.
Two methods are presented based on BMIs in order to improve the obtained results, by
relaxation schemes.
The second method addresses the synthesis of dynamic controllers considering a lin-
ear plant with the actuator restricted both in amplitude and rate, the system is meant to
be subjected to L
2
norm disturbances. The proposed methodology issues a non-linear dy-
namic controller, composed by a dynamic linear compensator, a saturating integrator and
anti-windup loops. This approach allows the simultaneous synthesis of both the controller
and the anti-windup loops. The validity of its announced conditions guarantees the closed-
loop origin stability, an upper-bound to the disturbances L
2
gain on the plants controlled
output, and an initialization set for the system that stands the specied disturbance. In
the absence of disturbances the systems origin is asymptotically stable guaranteed. Both
local and global stability conditions are given in terms of LMIs. Two BMI-based methods
arise in order to improve the results obtained on the referred optimizations problems by
relaxation schemes. Special cases are derived from the general method; in these cases
directly LMI conditions may be obtained.
Optimization problems arise in both methods in order to maximize disturbance toler-
ance and rejection, by means of respectively its L
2
-norm, and L
2
-gain at the controlled
output. Numerical Examples are presented in order to illustrate the effect of each method
in the solution of the disturbance toleration problem.
Keywords: Anti-windup, Saturation, Linear Systems, Continuous Time.
SUMRIO
LISTA DE ILUSTRAES . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
LISTA DE TABELAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
LISTA DE SMBOLOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1 INTRODUO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 DEFINIES PRELIMINARES . . . . . . . . . . . . . . . . . . . . . . 15
3 CONTROLE SOB SATURAO . . . . . . . . . . . . . . . . . . . . . . 19
3.1 Formulao Geral do Problema . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Modelos para Termo de Saturao . . . . . . . . . . . . . . . . . . . . . 22
3.2.1 Modelagem por Regies de Saturao . . . . . . . . . . . . . . . . . . . 22
3.2.2 Modelagem Politpica . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.3 Modelagem por No-Linearidade de Setor . . . . . . . . . . . . . . . . . 24
3.3 Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3.1 Anlise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3.2 Sntese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4 Sntese de Anti-windup . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4 COMPENSAO ANTI-WINDUP DINMICA . . . . . . . . . . . . . . 31
4.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2 Denio do Problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.3 O Sistema em Malha Fechada . . . . . . . . . . . . . . . . . . . . . . . . 33
4.4 Resultados Principais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.4.1 Sntese de Compensadores de ordem n
aw
= n +n
c
. . . . . . . . . . . . 35
4.4.2 Sntese de Compensadores de ordem n
aw
< n +n
c
. . . . . . . . . . . . 42
4.5 Problemas de Otimizao . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.5.1 Tolerncia Perturbao . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.5.2 Rejeio Perturbao . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.6 Exemplos Numricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.6.1 Simulao com o Compensador Anti-windup de Ordem Plena . . . . . . . 53
4.6.2 Sntese de Compensador Anti-windup de Ordem Reduzida . . . . . . . . 53
5 SNTESE DE CONTROLADORES DINMICOS . . . . . . . . . . . . . 59
5.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2 Denio do Problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.3 O Sistema em Malha Fechada . . . . . . . . . . . . . . . . . . . . . . . . 61
5.4 Resultados Principais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.5 Casos Especiais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.5.1 Matriz de transferncia da planta estritamente prpria, atuador mensur-
vel: D
y
= 0 e v
c
= v
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.5.2 Matriz de transferncia estritamente prpria, atuador mensurvel e entrada
do controlador livre de perturbao: D
y
= 0, v
c
= v
e B
c,w
= 0 . . . . . 73
5.6 Problemas de Otimizao . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.6.1 Tolerncia Perturbao . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.6.2 Rejeio Perturbao . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.7 Exemplos Numricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6 CONCLUSES E PERSPECTIVAS . . . . . . . . . . . . . . . . . . . . 79
REFERNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
LISTA DE ILUSTRAES
Figura 3.1: Regies de Saturao . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figura 3.2: i-simo componente da funo
()
() . . . . . . . . . . . . . . . . . 24
Figura 4.1: Sistema em Malha Fechada . . . . . . . . . . . . . . . . . . . . . . 33
Figura 4.2: Sinal z - Ordem Plena . . . . . . . . . . . . . . . . . . . . . . . . . 54
Figura 4.3: Sinal u - Ordem Plena . . . . . . . . . . . . . . . . . . . . . . . . . 54
Figura 4.4: Sinal w - Ordem Plena . . . . . . . . . . . . . . . . . . . . . . . . . 55
Figura 4.5: Sinal y
aw
- Ordem Plena . . . . . . . . . . . . . . . . . . . . . . . . 55
Figura 4.6: Sinal y
c
- Ordem Plena . . . . . . . . . . . . . . . . . . . . . . . . . 56
Figura 4.7: Sinal z - Ordem Reduzida . . . . . . . . . . . . . . . . . . . . . . . 56
Figura 4.8: Sinal u - Ordem Reduzida . . . . . . . . . . . . . . . . . . . . . . . 57
Figura 4.9: Sinal w - Ordem Reduzida . . . . . . . . . . . . . . . . . . . . . . . 58
Figura 4.10: Sinal y
aw
- Ordem Reduzida . . . . . . . . . . . . . . . . . . . . . . 58
Figura 4.11: Sinal y
c
- Ordem Reduzida . . . . . . . . . . . . . . . . . . . . . . . 58
Figura 5.1: Topologia de malha fechada proposta . . . . . . . . . . . . . . . . . 60
Figura 5.2: Sinal z . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Figura 5.3: Sinal u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Figura 5.4: Sinal w . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
LISTA DE TABELAS
Tabela 4.1: Trade-off Tolerncia Atenuao para a perturbao externa. . . . . 57
Tabela 5.1: Trade-off Tolerncia Atenuao para a perturbao externa. . . . . 77
LISTA DE SMBOLOS
bloco simtrico
bloco no relevante ao desenvolvimento
BMI Bilinear Matrix Inequality
LMI Linear Matrix Inequality
(i)
i-simo componente de um vetor
i
i-sima linha/coluna de uma matriz
sym{} soma do argumento com o seu transposto
sat
()
() saturao com limites simtricos em () aplicada ao vetor ()
()
() funo vetorial equivalente a () sat
()
()
rank(A) posto da matriz A
(P, ) elipside denido por x
T
Px <
L
2
espao de sinais com norma-2 nita
mdulo
x(t)
2
norma-2 do sinal x(t): x(t)
2
=
_
_
0
x(t)
T
x(t)dt
_1
2
conjunto dos nmeros reais
n
espao euclidiano de ordem n
JF(x) operador Jacobiano da funo vetorial F(x)
12
1 INTRODUO
Todas as atividades prescindem de algum tipo de controle. O condicionamento de pro-
cessos fsicos para que apresentemresultados desejados garantidamente motiva a pesquisa
na engenharia de controle. A necessidade da compreenso de processos fsicos comple-
xos e relevantes faz necessrio o uso de modelos que representem seus principais aspectos
para a aplicao a que se destinam. sobre o modelo do processo que leis de controle so
projetadas. O sucesso do controle est em quo apropriado o modelo escolhido.
Aimplementao da lei de controle d-se atravs de umcontrolador, e invariavelmente
utiliza-se sensores e atuadores. Estes, por sua vez, apresentam complexidades em maior
ou menor grau. Alm disto, existe um limite fsico de quanta energia pode ser transmitida
para um sistema. Por outro lado, a transferncia de energia para o sistema no instan-
tnea, o que requer um tempo para que um de seus estados assuma um valor distinto do
atual. Isto reete-se em uma taxa de variao limitada. Leis de controle que desrespeitam
estes e outros limites de atuao, podem gerar comportamentos imprevistos, e a ao de
controle no mais conduz o comportamento do sistema conforme o projeto original.
Os limites do atuador receberam grande interesse da literatura acadmica. Em es-
pecial o estudo dos efeitos adversos da saturao do atuador sobre o sistema. A ocor-
rncia imprevista da saturao pode levar o sistema instabilidade ou ao aparecimento
de respostas indesejveis inerentes ao comportamento no-linear do sistema em malha
fechada. Exemplos so mltiplos pontos de equilbrio e ciclos-limite. A saturao do
atuador ocorre quando ao menos um de seus limites excedido pelo sinal de controle que
alimenta a planta.
Desde os trabalhos de (FERTIK; ROSS, 1967), uma srie de publicaes dedicaram-
se ao estudo dos efeitos da saturao sobre o sistema em malha fechada. Os controladores
instalados em plantas da poca desconsideravam os limites dos atuadores da planta, assim
a ocorrncia da saturao causava no processo um comportamento indesejado e potenci-
almente nocivo s especicaes de desempenho do sistema. No captulo 3 um hist-
rico destas publicaes apresentado. So muitas as topologias de sistemas possveis,
mas dividem-se em duas abordagens principais. Enquanto a sntese direta consiste em
projetar-se um controlador que considere as restries do atuador, o anti-windup prope
a modicao da malha de controle original, que considera um atuador linear, incluindo
um compensador que dirima os efeitos indesejados da saturao sobre o sistema.
A partir dos anos 90, trabalhos sobre sistemas sujeitos saturao passaram a en-
fatizar a estabilidade, caracterizando o conjunto dentro do espao de estados, no qual a
estabilidade da origem garantida. A literatura considera principalmente casos de es-
tabilidade global e local. A estabilidade global geralmente implica em um desempenho
aqum do desejado na regio linear da planta, e requer que a planta tenha modos estveis
em malha aberta, o que nem sempre se verica. A estabilidade local restringe as garantias
13
a um conjunto limitado de estados que, se contiver a regio onde dar-se- a operao,
sucentemente abrangente. Alm disto, permite considerar plantas instveis em malha
aberta.
Por ser a estabilidade conditio sine qua non do controle, a diferena entre solues
que atendam a um dado problema de controle estar no nvel de desempenho obtido por
cada uma das solues propostas. Desta forma, a escolha de critrios de desempenho
fundamental Em(DORATO, 1987) e (COUTINHO; D. J. PAGANO, 2004) so considera-
dos funes custos como critrios de desempenho. Este trabalho considerar a tolerncia
e atenuao perturbao por serem criutrios relevantes na compreenso dos efeitos de
distrbios externos sobre o sistema.
A obra de (BOYD et al., 1994) estimulou a descrio das condies sucientes para
a existncia de uma soluo aos problemas abordados em forma de LMI. Este tipo de
representao foi bastante aceito pela comunidade cientca que fez largo uso da mesma
em trabalhos posteriores. Assim, na literatura, compensadores anti-windup estticos fo-
ram propostos para plantas com um controlador denido supondo todo o sistema linear.
A compensao dinmica anti-windup na realimentao de sada propiciou mais graus de
liberdade ao projeto do que seu equivalente esttico, todavia, sua representao em LMI
exigiu um desenvolvimento de melhores tcnicas algbricas, o que s recentemente foi
possvel. A diculdade de implementao de compensadores dinmicos de ordem plena
abriu espao para a sntese de compensadores de ordem reduzida, arbitrria, o que vem
sendo desenvolvido.
Das limitaes possveis no atuador, as mais abordadas so amplitude e taxa de varia-
o. Modelos de plantas que desconsiderama presena de perturbaes externas impedem
insights sobre a estabilidade do sistema quando da ocorrncia de tais distrbios.
Este trabalho aborda sistemas lineares invariantes no tempo, de tempo contnuo, su-
jeitos saturao do atuador - primeiramente em amplitude e mais adiante em amplitude
e taxa de variao. Abordam a sntese de controladores dinmicos de sada, e compensa-
dores anti-windup dinmicos de ordem plena e reduzida para malhas de realimentaes
dinmicas de sada. Os sistemas so sujeitos perturbao L
2
em todos os seus terminais
externos de modo a permitiremuma maior exibilidade ao usurio dos mtodos propostos
em adapt-los situao de seu interesse. Os resultados deste trabalho so uma extenso
ao caso de tempo contnuo de trabalhos recentes em tempo discreto, que tratam destes
temas ainda pouco explorados na literatura.
Este manuscrito est organizado como segue.
O captulo 2 apresenta os lemas, denies e funes utilizadas nos desenvolvimen-
tos. O captulo 3 apresenta o problema em estudo e um breve histrico dos trabalhos
na rea, contexto em que o presente trabalho se insere, e a justicativa para os mtodos
desenvolvidos e abordagens utilizadas.
O captulo 4 apresenta mtodos para a sntese de compensadores anti-windup de or-
dem plena e reduzida para sistemas sujeitos saturao do atuador em amplitude, com
garantias de estabilidade local e global - esta, quando a planta assimpermite. Este captulo
uma extenso dos trabalhos de (TARBOURIECH; GOMES DA SILVA Jr.; BENDER,
2006) para o caso contnuo. Um controlador dinmico de sada fornecido a priori tem
sua dinmica compensada por um bloco anti-windup dinmico, excitado pelo sinal de
erro entre a entrada e sada do atuador. Este compensador de anti-windup pode ter ordem
igual ou inferior soma da ordem da planta e do controlador. Para cada um destes casos
h um mtodo proposto. A obteno de condies lineares imediata se o compensador
possui ordem plena (n + n
c
). A compensao de ordem reduzida requer a aplicao do
14
lema de Finsler e a xao da estrutura de seus multiplicadores para que as condies
lineares sejam obtidas. O lema de Finsler ser apresentado no captulo 2.
O captulo 5 apresenta mtodos para a sntese de controladores dinmicos com la-
os anti-windup para plantas com atuadores sujeitos amplitude e taxa de variao
limitadas, com garantias de estabilidade local e global - esta, quando a planta assim per-
mite. Este captulo, embora seja uma extenso dos trabalhos de (GOMES DA SILVA Jr.
et al., 2005) para o caso contnuo segue um caminho distinto pelo tratamento diferenci-
ado que faz das perturbaes atuantes sobre o sistema, buscando uma maior generaliza-
o. Prope-se um mtodo para a sntese de um controlador dinmico no-linear de sada,
composto por um controlador dinmico linear, um integrador saturante e malhas estticas
de anti-windup. Como no capitulo 4, o lema de Finsler utilizado para construir-se uma
representao por LMI. A estrutura dos multiplicadores inseridos foi escolhida de modo
a ser o menos restritiva possvel.
O captulo 6 apresenta as concluses e perspectivas da continuidade deste trabalho.
15
2 DEFINIES PRELIMINARES
Este breve captulo apresenta algumas denies, funes e lemas que sero utilizadas
ao longo dos desenvolvimentos do presente trabalho.
Os sistemas abordados neste trabalho so todos de tempo contnuo. Por simplicidade,
a dependncia temporal ser omitida da notao.
Durante desenvolvimentos algbricos com freqncia blocos simtricos far-se-o pre-
sentes. Como forma de simplicar sua representao, a mesma ocorrer mediante a se-
guinte forma contrata.
sym{} :
nn
nn
, sym{A} = A+A
T
(2.1)
Nas mesmas circunstncias, a manipulao algbrica de matrizes envolver matrizes dia-
gonais e blocos diagonais. Dene-se da seguinte forma sua representao:
v =
_
v
(1)
v
(2)
v
(n)
, diag{v} =
_
_
v
(1)
0 v
(2)
0 0
.
.
.
0 0 0 v
(n)
_
_
(2.2a)
e
A
j
, j = 1, , N
n
j
n
j
BLKDG{
_
A
1
A
2
A
N
} =
_
_
A
1
0 A
2
0 0
.
.
.
0 0 0 A
N
_
_
(2.2b)
A saturao uma das principais funes consideradas neste trabalho. Dene-se-a aqui
como,
sat
()
() :
m
m
, sat
(
(i)
) = sign(
(i)
) min{|
(i)
|,
(i)
}; i = 1, , m (2.3a)
onde
sign() : , sign(
(i)
) =
_
_
_
1,
(i)
> 0
0,
(i)
= 0
1,
(i)
< 0
(2.3b)
A modelagem de sistemas saturados por no-linearidades de setor sugere a denio de
uma funo
()
() tal qual segue.
()
() :
m
m
,
() = sat
() (2.3c)
16
Durante a formulao de condies de sucincia existncia de solues propostas,
conjuntos como o abaixo sero necessrios.
S() = {
n
|
_
K
(i)
G
(i)
_
(i)
; i = 1, , m; K, G
mn
} (2.3d)
Conforme (2.3c) e (2.3d), segundo (GOMES DA SILVA Jr.; TARBOURIECH., 2005), o
seguinte lema pode ser enunciado.
Lema 2.1. Se S() ento a no-linearidade
(K) satisfaz a seguinte desigualdade:
(K)
T
T (
(K) G) 0 (2.3e)
para qualquer matriz diagonal positiva T
mm
.
Prova. Considere os trs casos abaixo.
1.
(i)
K
(i)
(i)
Neste caso, por denio,
(K
(i)
) = 0 e ento
(K
(i)
)T
(i,i)
(
(K
(i)
)G
(i)
) =
0
2. K
(i)
>
(i)
Neste caso,
(K
(i)
) = K
(i)
(i)
. Se S() ento K
(i)
G
(i)
(i)
.
Tambm
(K
(i)
) G
(i)
= K
(i)
(i)
G
(i)
0 e, como
(K
(i)
) > 0,
tem-se
(K
(i)
)T
(i,i)
(
(K
(i)
) G
(i)
) 0, T
(i,i)
> 0.
3. K
(i)
<
(i)
Neste caso,
(K
(i)
) = K
(i)
+
(i)
. Se S() ento K
(i)
G
(i)
(i)
.
Tambm
(K
(i)
)G
(i)
= K
(i)
+
(i)
G
(i)
0 e, como
(K
(i)
) < 0, tem-se
(K
(i)
)T
(i,i)
(
(K
(i)
) G
(i)
) 0, T
(i,i)
> 0.
Destes trs casos acima, sendo posto que S() conclui-se que
(K
(i)
)T
(i,i)
(
(K
(i)
) G
(i)
) 0, T
(i,i)
> 0, i = 1, , m, de acordo com
(2.3e)
Outro resultado de interesse, usado para relaxar condies bilineares o Lema de
Finsler, (FINSLER, 1937), enunciado como segue:
Lema 2.2. Considere-se um vetor
n
, uma matriz simtrica P
nn
, e uma matriz
B
mn
, tais que rank(B) < n. As seguintes asseres so equivalentes:
1.
T
P < 0; , tal que B = 0, = 0.
2.
_
B
_
T
PB
< 0.
3. : P B
T
B < 0.
4. F
nm
: P + sym{FB} < 0.
As seguintes denies sero importantes para apresentar-se as condies de garantia
da well-posedness do sistema em malha fechada.
Denio 2.1. Uma funo de transferncia dita prpria se o grau do polinmio cons-
tituinte do numerador no excede o do denominador.
17
Conforme (WEISSTEIN, ????), a seguinte denio pode ser apresentada.
Denio 2.2. Uma expresso dita bem-denida se sua denio associa-a uma nica
interpretao ou valor.
A partir das denies acima podemos apresentar a que segue.
Denio 2.3. Um sistema realimentado dito well-posed se todas as matrizes de trans-
ferncia em malha fechada so bem denidas e prprias.
Em (GRIMM et al., 2003) a seguinte condio de setor, juntamente com os lemas
2.3 e 2.4, utilizada para garantir que a interconexo do sistema well-posed. Sistemas
que em sua malha de realimentao apresentam uma no-linearidade, como a saturao
considerada neste trabalho, devem ser garantidamente well-posed. Como os mtodos
propostos so aplicados em plantas cujas matrizes de transferncia no so estritamente
prprias, a wellposedness do sistema em malha fechada dever ser garantida. Para tanto
os desenvolvimentos dos captulos 4 e 5 valer-se-o dos seguintes lemas extrados de
(GRIMM et al., 2003).
Lema 2.3. Considere uma funo localmente Lipschitz F :
n
n
e assuma que o
jacobiano de F satisfaz JF(x) M, para quase todo x
n
, onde o conjunto M
compacto, convexo, e cada matriz em M no singular. Ento existe uma nica funo
globlamente Lipschitz G :
n
n
tais que F (G(x)) = x para todo x
n
.
Equivalentemente, F um homeomorsmo com inversa globalmente Lipschitz.
Lema 2.4. Dadas duas matrizes quadradas D e V = V
T
> 0, se 2V +V D+D
T
V < 0
ento I D no singular para todo tais que o mapeamento linear z z pertence
ao setor [ 0, I ]
V
As provas dos lemas 2.3 e 2.4 sero omitidas, mas encontram-se em (ZACCARIAN;
TEEL, 2002), conforme disposto em (GRIMM et al., 2003).
Denio 2.4. Uma funo F :
m
m
dita pertencente ao setor [ 0, I ]
V
se
F(w)
T
V (w F(w)) 0 para todo w
n
. Note que
()
() a funo que pertence
ao setor [ 0, I ]
V
e portanto satisfaz a denio 2.4.
As provas de teoremas e corolrios do presente trabalho valer-se-o de funes agora
declaradas.
V () :
n
, V () =
T
P, P = P
T
> 0
nn
(2.4a)
onde
V () =
T
P +
T
P
(2.4b)
As estimativas de regio de atrao e regio atingvel sero efetuadas atravs de con-
juntos elipsoidais assim denidos.
P
nn
| P = P
T
> 0, e > 0 ,
(P, ) =
_
|
n
,
T
P
_
(2.4c)
Em (LIAPUNOV, 1892), inicia-se o estudo formal da estabilidade da origem de sis-
temas, atravs de garantias sucientes da estabilidade da origem do sistema. Para tanto,
Liapunov props o conceito de funes candidatas. As funes candidatas so testadas
18
dentro dos parmetros do sistema quanto a sua positividade, e negatividade de sua deri-
vada primeira. A funo V (), denida em (2.4a), um exemplo de uma candidata de
Liapunov.
So estas funes quadrticas, cujas curvas de nvel denem elipses. Por isto muitos
dos conjuntos denidos sero hiper-elipsides. A condio de setor generalizada proposta
no lema 2.1 apresenta um lugar geomtrico associado que dever incluir a estimativa
da regio atingvel. Como todas as condies so expressas em forma de inequaes
matriciais, enuncia-se o seguinte lema.
Lema 2.5. Considere o conjunto (2.3d) e o elipside (2.4c). Ento, conforme (BOYD
et al., 1994) possvel armar que (P,
1
) S () se e somente se
_
P
K
(i)
G
(i)
2
(i)
_
0, i = 1, , m (2.5a)
A obteno do lema acima baseada no lema de Schur - vide (SCHUR, 1918).
O captulo dedicado sintese de controladores dinmicos valer-se- do seguinte lema
apresentado em (GOMES DA SILVA Jr. et al., 2005), que garante que a taxa de variao
mxima tolervel pelo atuador no ultrapassada pelo sinal de controle.
Lema 2.6. Considere o seguinte sistema composto por m integradores, onde v, q, u
m
:
v = q
u = sat
0
(v)
Se |q
(i)
|
R
(i)
, i = 1, , m, segue que
| u
(i)
|
R
(i)
Prova. Considere-se que a constante Lipschitz de sat
()
() 1. Segue que
| u
(i)
| =
d
dt
sat
0
(i)
(v)
| v
(i)
|
| v
(i)
| = |q
(i)
|
R
(i)
_
, i = 1, , m
Estabelecidas estas denies e lemas, o captulo seguinte contextualiza os desenvol-
vimentos algbricos que seguiro neste trabalho.
19
3 CONTROLE SOB SATURAO
Na planta d-se a transformao que justica todo o processo em que est inserida.
O objetivo do controle a garantia de resultados, o que se traduz em estabilidade e de-
sempenho. O obstculo natural desta transformao a impossibilidade de transferir-se
energia ilimitadamente para um sistema. Neste sentido, o atuador representa este impe-
dimento quando satura em algum de seus limites. Exceder os limites do atuador implica
em transmitir-se planta um sinal distinto do fornecido pelo controlador. Desta forma, a
lei de controle projetada no aplicada. Surgem eventualmente overshoots, aumento do
tempo de acomodao do sistema e - em alguns casos - o sistema torna-se instvel.
A limitao fsica da transferncia de energia para um sistema motiva a anlise de
aspectos importantes relacionados saturao. O tamanho da regio de atrao da ori-
gem, determina onde, na ausncia de perturbaes, o sistema pode ser inicializado para
que convirja origem, assintoticamente. Na presena de perturbaes L
2
importante
conhecer-se um limitante superior para a norma L
2
das perturbaes tolerveis pelo sis-
tema em malha fechada. Maximizar esta tolerncia um critrio de desempenho potenci-
almente relevante. Outro critrio possvel a atenuao que o sistema em malha fechada
impe perturbao L
2
em uma de suas sadas. Todos este aspectos sero considerados
nos desenvolvimentos deste trabalho.
Se os valores obtidos na anlise do sistema dado so insatisfatrios, deve-se compen-
sar as decincias ou com um projeto de um controlador que leve em conta as restries
do atuador, ou modicar-se a malha de controle existente, inserido-lhe um compensador
anti-windup que suprima tanto quanto possvel os efeitos indesejados da saturao no
sistema.
Posto isto, e dado o fato de que todo o projeto feito sobre o modelo do sistema, a
modelagem da saturao do atuador de suma importncia para a anlise do sistema a
priori, e a sntese de compensadores anti-windup e de controladores dinmicos de sada.
Este captulo desenvolve cada um destes temas.
3.1 Formulao Geral do Problema
O modelo linear abaixo pode ser genericamente considerado como uma representao
em espao de estados das variaes em torno do equilbrio de uma planta.
_
_
_
x = A x +B u +B
w
w
y = C
y
x +D
y
u +D
y,w
w
z = C
x
x +D
z
u +D
z,w
w
(3.1a)
O vetor x
n
representa os estados da planta. Um processo pode apresentar vrias
sadas, nem todas mensurveis. Mesmo as eventualmente no mensurveis esto sujei-
20
tas a critrios de avaliao para que no comprometam o desempenho geral do processo.
Considerando-se isto, o vetor y
p
representa a sada medida, disponvel para reali-
mentao, e o vetor z
r
representa a sada controlada - utilizada para avaliao do
desempenho.
O vetor u
m
corresponde aos terminais de entrada da planta. A eles est impl-
cito um atuador, elemento que faz a transduo do sinal de controle para uma grandeza
equivalente no processo.
O modelo considerado prev perturbaes externas limitadas em norma L
2
. O vetor
w
q
representa no modelo estas perturbaes.
As demais matrizes so reais, constantes e de dimenses apropriadas. Ainda, os pares
(A, B), (C
y
, A) so respectivamente controlveis e observveis.
Como a mdoelagem do sistema considera apenas as variaes em torno do equilbrio
em que o sistema se encontra, a referncia externa em nada contribui para o projeto do
controlador. A alimentao do controlador poder ser fornecida pelos estados da planta,
todavia, nem sempre estaro acessveis para medies diretas. Isto ocorre ou porque sen-
sores e transdutores no esto disponveis, ou so inviveis economicamente. Portanto,
assume-se que apenas o vetor de sada y esteja disponvel para realimentao. Este ser o
vetor fornecido entrada do controlador.
O controlador pode ser esttico ou dinmico, denido a priori ou ser objeto de sntese.
Suponha-se que o controlador foi denido a priori, com o seguinte modelo,
_
x
c
= A
c
x
c
+B
c
u
c
+B
c,w
w
v
c
= C
c
x
c
+D
c
u
c
+D
c,w
w
(3.1b)
de modo a fornecer o sinal de controle para a planta, a partir de sua sada. Caso o controla-
dor seja esttico as matrizes A
c
, B
c
, C
c
so nulas. No modelo, x
c
nc
, u
c
= y, v
c
m
so respectivamente os vetores estado, entrada e sada do controlador. A sada do contro-
lador v
c
alimentar a entrada da planta u.
A impossibilidade fsica de transmitir-se energia ilimitadamente para o processo torna
a saturao do atuador um problema intrnseco engenharia de controle. Esta limitao
aqui representada pela magnitude do sinal de controle e sua derivada temporal primeira,
suportados pelo atuador.
Considera-se, ento, que cada entrada da planta est sujeita a uma restrio de am-
plitude, ou seja, cada componente est restrito a um valor mximo e mnimo simtricos.
Assim tem-se:
u
0
(i)
u
(i)
u
0
(i)
, i = 1, , m (3.1c)
possvel considerar-se adicionalmente que o atuador restrito em taxa de variao. Esta
limitao pode ser representada como:
u
R
(i)
u
(i)
u
R
(i)
, i = 1, , m (3.1d)
As derivadas de ordem superior de u poderiam ser consideradas. Nem sempre, existir
um signicado fsico associado a elas, tampouco uma necessidade de considerao pela
irrelevncia das mesmas.
Com base neste contexto, possvel enunciar-se o seguinte problema de anlise:
Problema 3.1 (Anlise de Estabilidade e Desempenho L
2
). Dado o sistema composto
por (3.1a) e (3.1b), interconectados atravs de u
c
= y e u = v
c
, sujeito s restries
(3.1c) e (3.1d), deve-se determinar a regio do espao de estados na qual garantida
21
a estabilidade da origem do sistema em malha fechada, um limitante superior para o
ganho L
2
na transferncia de w para z e a mxima norma L
2
da perturbao tolervel
pelo sistema para a qual as trajetrias sejam gantidamente limitadas.
A partir destes resultados, possvel determinar-se um conjunto de condies inici-
ais para os estados do sistema e em funo disto, a mxima norma L
2
da perturbao
tolervel.
Caso a anlise de estabilidade e desempenho restrinjam as operaes uma regio
insuciente para a operao do sistema, algo deve ser feito para compensar esta limitao.
Uma soluo possvel efetuar-se a sntese do controlador. Assim suponha-se que
n+nc
seja o vetor de estados aumentado do sistema em malha fechada. Adicionalmente,
considere-se que
(0)
0
(3.2)
onde
0
representa a regio que contm os pontos onde o sistema inicializado. , ento,
possvel enunciar-se um problema alternativo para o caso em questo.
Problema 3.2 (Sntese de Controladores com Atuador restrito). Dado o sistema (3.1a)
sujeito s restries (3.1c) e (3.1d), deve-se determinar um controlador dinmico de sada
que garanta a estabilidade da origemdo sistema emmalha fechada, umlimitante superior
para o ganho L
2
na transferncia de w para z e a norma L
2
da mxima perturbao
tolervel para a qual as trajetrias do sistema sejam gantidamente limitadas, para todo
(0)
0
.
O conjunto
0
pode ser um conjunto pr-denido, ou pode ser algum conjunto no-
vazio. Os mtodos apresentado neste trabalho consideram
0
como a regio pertencente
ao elipside (P, ), para algum escalar real > 0.
No caso em que o controlador dado a priori no tenha considerado as restries do
atuador em seu projeto, quando ocorrer a saturao do atuador haver uma incoerncia
entre seus sinais de entrada e saida. Para dirimir esta incoerncia e com isto suprimir
os efeitos adversos sobre a estabilidade e desempenho do sistema em malha fechada, um
compensador - chamado compensador anti-windup - deve ser dimensionado. Trata disto
o seguinte problema de sntese.
Problema 3.3 (Sntese Anti-windup). Dado o sistema composto por (3.1a) e (3.1b), in-
terconectado atravs de u
c
= y e u = v
c
, sujeito s restries (3.1c) e (3.1d), onde
representa o vetor de estados aumentado para o sistema em malha fechada, deseja-se
determinar um compensador que adicionado malha de realimentao atue sobre o sis-
tema em malha fechada de modo a reduzir a diferena entre a entrada e sada do atuador,
garantindo a estabilidade da origme do sistema em malha fechada para um conjunto de
condies de inicializao no vazio.
A saturao do atuador cria uma diferena entre seus terminais de entrada e sada
que a origem dos efeitos adversos no sistema investigados neste trabalho. Assim, toda
ao que reduza esta diferena, reduz os efeitos adversos desta saturao sobre o sistema
em malha fechada. Ao problema 3.3 pode ser adicionado critrios de desempenho e
estabilidade L
2
citados nos problemas 3.1 e 3.2.
Os problemas 3.2 e 3.3 abordam o tema central deste trabalho: o projeto da malha de
controle levando em conta a saturao do atuador. A compensao anti-windup tratada
em 3.3 uma soluo para malhas de realimentao com controladores concebidos a
priori que desprezam no-linearidades do sistema.
22
Note-se que a saturao do atuador faz deste o nico elemento no-linear do sistema.
A seo seguinte aborda como a mesma pode ser modelada. A partir dos modelos de
saturao, seguir-se-o mtodos de sntese.
3.2 Modelos para Termo de Saturao
A saturao em amplitude bastante discutida na literatura, por exemplo em (TAR-
BOURIECH; GARCIA, 1997), (KAPILA; GRIGORIADIS, 2002), (HU; LIN, 2001) e
(BERNSTEIN; MICHEL, 1995). A saturao em taxa de variao, todavia, recebe menos
ateno nas publicaes que consideram controle sob restries. Algumas excees so
(TYAN; BERNSTEIN, 1997), (STOORVOGEL; SABERI, 1999) e (GOMES DA SILVA
Jr.; TARBOURIECH; GARCIA, 2003). Conforme (REGINATTO, 2000), a representa-
o do efeito da limitao na taxa de variao do sinal de controle mais complexa que a
limitao em magnitude, e requer alm de no-linearidades, um operador com memria.
Este trabalho dedica um captulo sntese de controladores para sistemas com restri-
es na taxa de variao do atuador. A topologia proposta, no entanto, evita as complexi-
dades acima referidas. O controlador gera, inicialmente, a derivada temporal primeira do
sinal de controle. Um integrador saturante em srie, gera o sinal de controle entregue aos
terminais da planta. Desta forma, tanto a derivada primeira do sinal de controle, como o
prprio, so restritos antes do atuador por uma saturao simtrica. Portanto, esta topolo-
gia da malha de controle permite que o mesmo modelo de saturao possa ser aplicado a
ambas restries.
Assim posto, a seguir sero discutidos os modelos para o termo de saturao em am-
plitude do atuador mais freqentes na literatura. Para exemplic-los, o sistema genrico
em malha fechada abaixo, sujeito restrio de amplitude no atuador, ser considerado.
x = Ax +Bsat
()
(Kx) (3.3)
Onde a funo sat
()
() encontra-se denida no captulo 2 - vide equao (2.3a) - e Kx = u
3.2.1 Modelagem por Regies de Saturao
A evoluo das trajetrias do sistema sujeito a restries na amplitude do atuador,
eventualmente altera a dinmica de cada estado pela saturao, ou retorno regio linear
de uma dada entrada de controle. A partir disto, observou-se a possibilidade de dividir-se
o espao de estados em regies onde a dinmica da planta permanecesse constante. Estas
divises determinam regies de saturao. Para maiores detalhes sobre esta modelagem
da saturao vide (GOMES DA SILVA Jr.; TARBOURIECH, 1999).
Para o caso do sistema (3.3), dena-se o vetor
m
. Cada componente assumir o
valor 1 caso o sinal de controle estiver abaixo do limite inferior da excurso do atuador,
1 quando o exceder o superior, e 0 caso a operao der-se na regio linear.
Assim disposto, para cada combinao possvel das entradas de controle quanto a
saturao, gerar-se- um vetor distinto, o que totaliza 3
m
vetores
j
.
A representao do sistema (3.3) de acordo com esta modelagem torna-se:
x =
_
A +Bdiag{1
m
|
j
|}K
_
x +Bdiag{}
j
(3.4)
Como o vetor que contm os limites de saturao de cada entrada de controle,
possvel denir-se o seguinte conjunto:
S(K
0
j
x,
0
j
) =
_
x
n
, K
0
j
x
0
j
, j = 1, , l
J
_
23
No conjunto acima, cada linha de K
0
j
composta ou por uma linha de K ou de K,
conforme a necessidade da descrio. O mesmo diz-se de
0
j
, onde cada elemento deste
vetor composto por um elemento ou da linha correspondente, conforme cada
entrada de controle encontre-se saturada ou no.
O sistema assim , pois, representado de forma a compreender cada entrada saturada
como uma perturbao aditiva constante. Desta forma, dene-se regies do espao de
estados dentro de cada qual uma dinmica distinta conduz a evoluo dos estados do
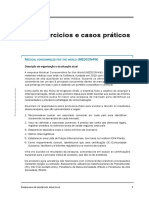
sistema. Estas regies so ditas regies de saturao. Cada regio de saturao denida
por um conjunto S(K
0
j
x,
0
j
). A gura 3.1 ilustra estas regies. Esta gura retrata as
R6
R7
R0
R5
R4
R3
R8
R1
R2 K2=r2
K2=r2
K1= r1
K1=r1
Figura 3.1: Regies de Saturao
divises de um espao
2
de um sistema com duas entradas de controle, respectivamente
saturveis em r
1
e r
2
.
Garantias para um sistema onde a saturao assim modelada so vlidas to somente
para as trajetrias deste sistema, exatamente o necessrio.
3.2.2 Modelagem Politpica
Segundo esta modelagem, a seguinte expresso escrita a partir de (3.3):
x = Ax +Bdiag{(x)} Kx
onde (x) denido conforme (TARBOURIECH, 1991):
(x)
(i)
=
_
(i)
K
(i)
x
, se K
(i)
x <
(i)
1, se
(i)
K
(i)
x
(i)
(i)
K
(i)
, se K
(i)
x >
(i)
Assim, para todo i = 1, , m, 0 <
(i)
(x) 1, e pode ser interpretado como um
quanticador do nvel de saturao. Assim posto, possvel representar o sistema (3.3)
por:
x =
_
A+Bdiag{(x)}K
_
x
Agora, suponha-se que exista um limite mximo de saturao, de modo que os estados
connem-se a um conjunto
p
para todo t > 0. Com os limites de saturao x
p
,
tem-se agora
(i)
(i)
(x) 1, para todo i = 1, , m. Como cada entrada de con-
trole i ter a si associada um respectivo
(i)
(x) contido no intervalo [
(i)
, 1 ], possvel
denir-se um vetor
j
m
, onde j = 1, , 2
m
, correspondente s 2
m
combinaes
24
possveis de m entradas assumindo
(i)
ou 1 como valores em cada entrada. Este con-
junto de vetores compe os vrtices de um politopo em torno dos possveis valores de Kx
para todo x
p
.
Para cada j = 1, , 2
m
, possvel denir-se uma matriz A
j
= A+Bdiag{
j
}K.
Seja tambm A
k
= A + Bdiag{(x)}K. Ento, para todo x
p
, a matriz A
k
sempre estar contida no envelope convexo Co
_
A
j
: j = 1, , 2
m
_
.
Todo tratamento algbrico feito sobre o sistema (3.3), modelado politopicamente, con-
sidera todas as matrizes A
j
que envolvem a matriz A
k
. A matriz A
k
a que de fato re-
presenta o sistema em cada instante de tempo x
p
. Notadamente, todas as trajetrias
do sistema podem ser obtidas pelo modelo politpico, no entanto, nem todas as trajet-
rias obtidas pelo modelo correspondem a trajetrias do sistema em estudo. Conforme o
que foi dito na seo 3.2.1, apenas necessrio garantir a estabilidade da trajetria do
sistema. Garantias sob a abordagem politpica so intrinsecamente conservativas por im-
porem exigncias alm das necessrias, o que corresponde a trajetrias no descritas pelo
sistema, mas possveis por esta modelagem.
Mais adiante, (HU; LIN, 2001) prope uma condio generalizada para a modelagem
politpica, o que possibilita conduzir os problemas de anlise e sntese sob esta modela-
gem a uma representao por LMI de suas condies sucientes para a existncia de uma
soluo.
3.2.3 Modelagem por No-Linearidade de Setor
O plano
_
x, f(x)
_
pode ser dividido em setores. Um setor a regio entre duas retas
no coincidentes que se cruzam na origem do plano.
O conceito de estabilidade absoluta, apresentado em (KHALIL, 1996) captulo 10,
aplica-se a sistemas cujas no-linearidades vetoriais, descentralizadas e sem memria lo-
calizadas na malha de realimentao pertenam a um setor. Por esta modelagem, a origem
do sistema em malha fechada garantida estvel para qualquer no-linearidade em sua
malha de realimentao pertencente ao setor especicado. Para maiores detalhes sobre
estabilidade absoluta e condies de setor, vide (KHALIL, 1996) captulo 10.
O sistema (3.3) contm apenas a no-linearidade sat
(Kx), contida no setor [ 0 , 1 ]. A
funo
(Kx), denida em (2.3c), dentro de um mbito local pode pertencer a um setor
menos abrangente. Para todo x
n
, no entanto, sempre pertencer ao setor [ 0 , 1 ]. A
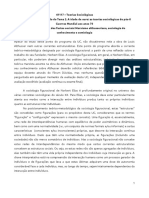
i-sima componente da funo
()
() representada na gura 3.2, e ilustra a pertinncia
a setor.
a
b
Figura 3.2: i-simo componente da funo
()
()
25
O sistema (3.3) pode ser reescrito como
x =
_
A+BK
_
x B
(Kx)
A regio em que a funo nula corresponde operao com o sinal de controle na
faixa linear do atuador, ou seja:
(i)
K
(i)
x
(i)
, i = 1, , m.
A inclinao
(i)
do segmento de reta pontilhado que une a origem a ( a , b ) dada
por
(i)
=
b
a
=
b
(i)
+b
. Isolando-se a, tem-se a =
(i)
1
(i)
. Logo, se a K
(i)
x a, ento
(i)
(K
(i)
x) [ 0 ,
(i)
].
Para cada setor [ 0 ,
(i)
] que
(K
(i)
x) pertena, existe um intervalo corresponde ao
qual K
(i)
x deve pertencer. Fora deste intervalo,
(K
(i)
x) abandona o referido setor.
Seja
s
um conjunto de todos os x
n
para os quais
(i)
(K
(i)
x) pertena a
( 0 ,
(i)
) para todo i = 1, , m. Nestas circunstncias, verica-se a seguinte condi-
o de setor.
(K
(i)
x)
T
_
(K
(i)
x)
(i)
K
(i)
x
0
Que matricialmente expressa torna-se,
(Kx)
T
[
(Kx) Kx] 0 (3.5)
onde = diag{
(i)
}, i = 1, , m. Esta a condio clssica de setor e apresenta um
forte apelo geomtrico em sua interpretao.
Se cada componente
(i)
(K
(i)
x) no ultrapassa a reta
(i)
K
(i)
x, impossvel que os
dois termos do produto
(Kx) e (
(Kx) Kx) encontrem-se no mesmo semi-plano
denido pelo eixo
(Kx) = 0.
Em (GOMES DA SILVA Jr.; TARBOURIECH., 2005) proposta uma nova condio
de setor, generalizada. Esta condio apresentada no lema 2.1. Sua aplicao mosta-se
mais eciente que a condio clssica em condies de estabilidade, sendo menos restri-
tiva por no limitar-se a uma estrutura diagonal - como a matriz na condio clssica - e
permitir a representao de condies sucientes para a estabilidade da origem do sistema
em malha fechada sob forma de LMI. A interpretao geomtrica perde-se. A condio
generalizada aplica-se apenas a no-linearidades do tipo zona-morta. Assim, no garante-
se mais a estabilidade absoluta da origem. Por isso tambm menos conservativa.
A partir do lema 2.1, tem-se em (2.3e):
(K)
T
T (
(K) G) 0
Se T = I
m
, G = K e = x, a condio generalizada torna-se a clssica expressa em
(3.5). Logo, todas as solues obtenveis pela condio clssica o so pela generalizada.
O uso de uma condies de setor em problemas com esta modelagem, ou de uma
regio politpica na modelagem homnima motivado pela possibilidade de aplicar-se a
S-procedure. A S-procedure uma tcnica de relaxao de uma condio de denio
de sinal. Ao invs de garantir-se a validade das condies para todo o espao de estados,
com esta tcnica garante-se-a apenas onde o modelo da no-linearidade vlido, algo
mais restrito. Quando a saturao do atuador modelado por no-linearidades de setor,
isto equivale a garantir-se a validade das condies da existncia de uma soluo apenas
para todo que pertena ao setor S() onde a no-linearidade se inclui. Para maiores
detalhes sobre a S-procedure, vide (BOYD et al., 1994), pgina 23.
26
3.3 Problemas
3.3.1 Anlise
A anlise de sistemas de controle sujeitos saturao do atuador consiste em:
1. A partir de um sistema dado, obter-se estimativas da regio de atrao da origem
para o sistema em malha fechada, dentro da qual as trajetrias podem garantida-
mente convergir para a origem;
2. Determinar-se uma estimativa do conjunto de estados iniciais que suporta um nvel
de perturbao sem que sob seu efeito o sistema torne-se instvel, abandonando a
regio de atrao da origem em malha fechada;
3. Avaliar-se o efeito da perturbao sobre o sistema e a capacidade do mesmo de
atenuar seu efeito.
Estes tpicos sero abordados a seguir.
3.3.1.1 Regio de Atrao
A regio de atrao corresponde ao conjunto de todos os pontos do espao de esta-
dos da dimenso do sistema onde o mesmo pode ser inicializado tendo suas trajetrias,
na ausncia de perturbao, convergindo para a origem. A estimativa da regio de atra-
o feita na ausncia de perturbaes. A diculdade est em obter-se uma estimativa
satisfatria para o problema em estudo, ou prxima da regio de atrao da origem.
Uma vez que exista distrbios L
2
agindo sobre o sistema, haver um conjunto m-
ximo atingvel. Este conjunto determinado pelo espao de estados onde as trajetrias
do sistema evoluem a partir de seu conjunto de estados iniciais, conduzidos pela ao
do distrbio L
2
1
. Assim, para um mesmo conjunto de estados iniciais, quanto maior a
estimativa do conjunto atingvel pelas trajetrias do sistema, contida na regio de atrao
da origem, maior a tolerncia garantida do sistema em malha fechada a perturbaes L
2
.
Para maiores detalhes vide (GOMES DA SILVA Jr.; TARBOURIECH; REGINATTO.,
2004).
3.3.1.2 Tolerncia e Rejeio Perturbao
Sistemas fsicos so sujeitos a toda a sorte de perturbaes, rudos e variaes de
parmetros. Neste trabalho ser estudada a inuncia que distrbios limitados em energia
exercem sobre o sistema. Segundo (PAIM et al., 2002), o interesse principal neste estudo
vem do fato de que um sistema sob saturao submetido a perturbaes sucientemente
fortes pode no ser capaz de garantir que seus estados permaneam dentro da regio de
atrao da origem e, conseqentemente, pode vir a apresentar trajetrias divergentes. O
sistema a seguir utilizado para ilustrar-se este problema.
Considere-se o seguinte sistema em malha fechada, assumindo-se seus estados iniciais
nulos.
= A +Bsat
()
(K) +B
w
w
y = C
y
+D
y
sat
()
(K) +D
y,w
w
z = C
z
+D
z
sat
()
(K) +D
z,w
w
1
Por ser um problema de regulao, no existem referncias.
27
A soluo do problema consiste em encontrar-se uma estimativa para o maior conjunto
atingvel pelas trajetrias do sistema sem que estas abandonem a regio de atrao da ori-
gem. Como os estados iniciais so nulos, somente a perturbao que excita o sistema.
Haver um limite na norma L
2
das perturbaes para o qual as trajetrias mantenham-se
limitadas regio de atrao da origem. Este limite na norma L
2
da perturbao cor-
responde ao nvel de tolerncia do sistema em malha fechada distrbios limitados em
normal L
2
representados por w.
Por outro lado, o conjunto atingvel das trajetrias limitadas para a mxima norma
L
2
da perturbao tolervel corresponde uma estimativa da regio de atrao da origem
quando a perturbao nula e o sistema inicializado dentro deste conjunto. Note-se que
quando sabidamente o sistema no ser inicializado na origem, mas dentro de umconjunto
que a inclua, a tolerncia perturbao diminui correspondentemente, vide (CASTELAN
et al., 2004).
Outra abordagem consiste em vericar-se em quanto o sistema atenua a perturbao
qual submetido, desde que esta perturbao seja tolervel, ou seja: as trajetrias do sis-
tema convirjam para a origem. Este problema chamado de rejeio perturbao. Esta
vericao pode ser feita em qualquer varivel do sistema, mas usualmente conside-
rada em uma sada do sistema. O critrio de desempenho utilizado nos desenvolvimentos
dos captulos 4 e 5 a rejeio perturbao na sada controlada do sistema em malha
fechada, medida pelo limitante ao ganho L
2
ali vericado. Em problemas de sntese,
garantir-se- que este ganho no exceda um limitante
.
3.3.2 Sntese
A sntese de leis de controle para sistemas sujeitos saturao do atuador consiste em
garantir-se:
1. A estabilidade assinttica da origem do sistema em malha fechada, na ausncia de
perturbaes;
2. A estabilidade L
2
do sistema dentro de uma regio contendo a origem, para um
eterminado conjunto de perturbaes externas limitadas em norma L
2
;
3. Algum nvel de desempenho dentro desta regio.
A sntese de leis de controle para sistemas sujeitos saturao do atuador aborda
questes similares s da anlise.
3.3.2.1 Regio de Atrao
A lei de controle sintetizada pode ter como objetivo a garantia da estabilidade da ori-
gem em mbito global. Desta forma, a regio de atrao da origem corresponde a
n
mf
,
onde n
mf
a ordem do sistema aumentado, o que inclui a dinmica adicionada pela malha
de realimentao. Segundo (SONTAG; SUSSMANN, 1990) e (BURGAT; TARBOURI-
ECH, 1992) sempre possvel encontrar uma lei de controle do tipo realimentao linear
de estados que estabilize globalmente o sistema saturado, desde que ele seja estvel em
malha aberta. Todavia, sabido tambm, que leis de controle globalmente estveis apre-
sentam um comportamento dinmico freqentemente insatisfatrio, uma vez que a lei de
controle sacrica o desempenho na medida necessria garantia da estabilidade global.
A estabilidade semi-global da origem signica que sua regio de atrao pode ser
to grande quanto se queira desde que limitada. assim, determinado a priori a regio
28
do espao de estados garantidamente inclusa na regio de atrao da origem do sistema
em malha fechada. Condies necessrias e sucientes para a estabilidade semi-global,
segundo (LIN; SABERI, 1993), (GOMES DA SILVA Jr.; TARBOURIECH, 2001), (PIT-
TET; TARBOURIECH; BURGAT, 1997) e (HINDI; BOYD, 1998) so tais que o par
(A, B) seja estabilizvel e o sistema seja estabilizvel em malha aberta.
A estabilidade local a nica opo quando a planta possui autovalores instveis em
malha aberta. Neste caso impossvel a estabilizao global mediante tcnicas de controle
linear. Todavia, como os estados de um sistema representativo de um processo - via de
regra - evoluem dentro de uma regio restrita, no necessrio garantir-se a estabilidade
alm de uma regio que inclua este espao. Em contrapartida, o desempenho dentro desta
regio torna-se relevante, o que juntamente com controles limitados e modos instveis em
malha aberta compem restries considerveis lei de controle.
De qualquer forma, uma parcela signicativa dos modelos lineares so obtidos a par-
tir de modelos no-lineares descritores da dinmica da planta, linearizados em torno de
um ponto de operao. Estes modelos assim obtidos tem sua validade somente em uma
vizinhana (estreita, muitas vezes) em torno da origem, ou seja: ponto de equilbrio do
modelo no-linear original. Descrevem to somente a dinmica do sistema para pertur-
baes em torno deste equilbrio. Assim posto, questionvel a eccia de garantias da
estabilidade global em sistemas lineares deste tipo.
A garantia de estabilidade foi inicialmente desenvolvida mediante realimentao de
estados. Alguns exemplos de tcnicas baseadas nesta forma de realimentao podem ser
encontrados em (GOMES DA SILVA Jr. et al., 1997) e (HU; LIN, 2001). A principal
desvantagem desta abordagem est na inviabilidade da implementao desta lei de con-
trole caso os estados sejam imensurveis. So poucos, comparativamente, os trabalhos
que abordam a realimentao dinmica de sada, que contorna esta limitao. Exemplos
so (BERNSTEIN, 1987) e (NGUYEN; JABBARI, 2000). Em (NGUYEN; JABBARI,
2000), todavia,considera-se perturbaes limitadas em norma L
. A no-linearidade em-
pregada a prpria saturao, sem uma modelagem especial conforme apresentado na
seo 3.2, o que visaria encontrar um problema convexo. Perturbaes persistentes so
tipicamente vinculadas a uma restrio de norma L
. A especicao de um limitante
superior para a amplitude exige um signicativo conhecimento do processo em estudo.
Encontrar um valor no conservativo sucientemente elevado requer a cincia das cir-
cunstncias operacionais para as quais o sistema deve ter seu desempenho e estabilidades
garantidos. Embora restries em norma L
2
estejam restritas a perturbaes limitadas em
energia, no existe a exigncia da perturbao restringir-se a um limite de amplitude, o
que simplica a deciso de projeto quanto a este aspecto.
3.3.2.2 Tolerncia e Rejeio Perturbao
Dentro dos critrios de desempenho exigidos a um sistema com estabilidade local, o
desempenho em relao perturbao merece destaque pela freqncia com que con-
siderado em processos com toda a sorte de interferncias externas. Assim, perturbaes
L
2
representativas de fenmenos exgenos relevantes so consideradas. Nestes termos,
a tolerncia a uma perturbao com determinada norma L
2
pode ser exigida dentro de
uma dada regio. A prtica comum , ento, garantir-se que a ao de uma perturbao
com norma L
2
nita e conhecida sobre o sistema no conduza suas trajetrias em malha
fechada para fora da regio de atrao da origem.
Por outro lado, a rejeio perturbao avalia a capacidade que o sistema tem de
atenuar em um ou mais de seus terminais de sada o efeito de uma perturbao limitada
29
em norma L
2
, a que esteja sujeito em um ou mais de seus terminais de entrada. Esta
rejeio pode ser, e usualmente assim o , quanticada atravs de um limitante superior
para o ganho L
2
que a perturbao apresente aos terminais de sada do sistema de interesse
esta questo.
Ambos problemas sero includos nos objetivos considerados pelos mtodos de sn-
tese apresentados neste trabalho.
3.4 Sntese de Anti-windup
As restries do atuador em sistemas instveis em malha aberta restringem tambm
a regio de atrao da origem deste sistema em malha fechada. Sistemas estveis em
malha aberta, com um controle restrito sujeitam-se a um desempenho limitado, ainda que
a estabilidade global seja possvel. A ocorrncia da saturao do sinal de controle em um
sistema em malha fechada cria uma diferena entre a sada e a entrada do atuador, o que
chamado de windup. Como conseqncia o sistema deixa de responder de acordo com o
sinal de controle aplicado. Nesta circunstncia a lei de controle no mais efetivamente
aplicada planta, que responde de forma indesejadamente distinta.
A tcnica de anti-windup consiste em a partir de um sistema realimentado por uma lei
de controle que despreza qualquer no-linearidade, sintetizar-se uma malha de realimen-
tao que elimine a diferena entre a entrada e sada do atuador sempre que ela existir.
Para tanto, existem duas abordagens: compensao esttica ou dinmica. Ambas tratam
da forma como suprime-se a diferena entre os sinais a entrada e sada do atuador; todavia,
a compensao esttica efetua-a de forma constante, enquanto a compensao dinmica
adiciona estados ao sistema em malha fechada e mediante graus de liberdade adicionais
sntese, permite que a compensao evolua de forma suave ao longo de toda sua in-
terveno. Cada uma destas abordagens pode considerar basicamente dois problemas de
otimizao: desempenho e maximizao da estimativa da regio de atrao.
Este problema foi inicialmente identicado em malhas de controle envolvendo con-
troladores com ao integral. A evidente sobrecarga do integrador motivou a busca de
uma soluo. Tcnicas especcas foram desenvolvidas a partir (FERTIK; ROSS, 1967).
Durante as dcadas seguintes os desenvolvimentos seguiram, considerando-se um con-
trole - dito nominal - projetado a priori, desconsiderando-se o efeito da saturao do
atuador. Na dcada de 90, (WALGAMA; STERNBY, 1990) aponta a caracterstica de
observadores em diversas malhas de compensao anti-windup. Em (KOTHARE et al.,
1994), apresenta-se um framework nico para anlise das principais tcnicas existentes,
at ento. Este esforo de unicao das tcnica de anti-windup mostrou que tcnicas s
vezes topologicamente distintas eram bastante similares se comparadas pelo framework
proposto. Os trabalhos concentravam-se no aprimoramento das tcnicas, todavia, sem um
tratamento mais rigoroso da estabildiade. A partir de 96, com (MIYAMOTO; VINNI-
COMBE, 1996) a estabilidade em malha fechada explicitamente abordada, com nfase
na estabilidade global. Em seguida, (TEEL; KAPPOR, 1997) introduz o conceito de anti-
windup L
2
como um problema de garantia da estabilidade L
2
, o que alm de vincular o
estudo formal da estabilidade ao problema de windup, tambm abre espao para o trata-
mento de questes de robustez.
A partir de (BOYD et al., 1994) inequaes matriciais lineares passaram a ser incor-
poradas na sntese de controladores e anlise de sistemas, sujeitos a restries no controle.
Mtodos baseados em LMI mostraram-se bastante adequados para o tratamento de pro-
blemas multi-objetivo. A cada objetivo associa-se um conjunto de restries em forma
30
de LMI. A soluo do problema, quando existe, atende a todas as restries. Pode ser
encontrada com o uso de pacotes comerciais de softwares. Hoje tcnicas de programa-
o linear so bastante difundidas na literatura, muito devido s contribuies de (BOYD
et al., 1994). Desta forma, possvel tratar-se diversos aspectos imprtantes como tamanho
e forma da regio de atrao, critrios lineares de performance distintos, especicaes
dinmicas, etc. Embora outras tcnicas no baseadas em LMI seguiram sendo estudadas,
este trabalho considerar apenas as abordagens com LMIs. Em (GOMES DA SILVA Jr.;
TARBOURIECH; REGINATTO, 2002), considerando-se sistemas de tempo contnuo, o
mtodo l proposto caracteriza explicitamente o domnio de estabilidade com tcnicas
de anti-windup, buscando otimizar-se um critrio de desempenho enquanto maximiza-se
a estimativa da regio de atrao da origem do sistema em questo, em malha fechada.
O comportamento no-linear do sistema sob saturao descrito por modelo de no-
lienaridade de setor clssica, por isto chega-se a uma conduo BMI, cuja soluo medi-
ante esquemas de relaxao por iteraes entre LMIs alternadas, no garante uma otimi-
zao global dos critrios. Em (MULDER; KOTHARE; MORARI, 2001) compensadores
estticos so propostos para estabilizao global e limitao do ganho L
2
da perturbao.
O mtodo ali proposto apresenta pela primeira vez restries em LMI. J (GRIMM et al.,
2003), propondo uma compensao dinmica anti-windup, descreve um mtodo baseado
em LMI que garante ganho L
2
nito para um sistema exponencialmente estvel.
Em (HU; LIN; CHEN, 2002), um mtodo de sntese de realimentao esttica de es-
tados proposto baseado em LMIs, a partir de BMIs relaxadas. Perturbaes persistentes
so consideradas na entrada da planta. A no-linearidade correspondente aos limites do
atuador so consideradas em um modelo politpico generalizado.
em (GOMES DA SILVA Jr.; TARBOURIECH., 2003) que um mtodo para sntese
de anti-windup esttico proposto baseado em LMI, para sistemas com modos instveis
em malha aberta. O mtodo baseado em uma nova modelagem por no-linearidade
de setor, dita generalizada. Como o emprgo da condio de setor clssica - baseada
em uma matriz diagonal - leva a restries expressas por BMIs, neste trabalho utiliza-
se a condio de setor proposta em (GOMES DA SILVA Jr.; TARBOURIECH., 2003) -
baseada em uma matriz de estrutura livre. Trabalhos posteriores dos autores estenderam
os resultados para sistemas discretos, propondo recentemnte a sntese de compensadores
dinmicos (TARBOURIECH; GOMES DA SILVA Jr.; BENDER, 2006), e a sntese de
controladores com restrio adicional em taxa de variao, (GOMES DA SILVA Jr. et al.,
2005). Todas as condies so expressas em LMIs.
Como parte de uma srie de trabalhos desenvolvidos a partir da nova condio de
setor publicada em (GOMES DA SILVA Jr.; TARBOURIECH., 2003), este trabalho es-
tende para o caso contnuo os resultados de (TARBOURIECH; GOMES DA SILVA Jr.;
BENDER, 2006) e (GOMES DA SILVA Jr. et al., 2005).
Com esta motivao, desenvolve-se a seguir mtodos que endeream problemas pouco
abordados na literatura de controle automtico para sistemas lineares. Existem muitas
publicaes que tratam o anti-windup esttico; poucas, o anti-windup dinmico. Sobre
este problema, grande parte consideram a estabilidade global; poucas, a local. Ainda,
praticamente inexistem publicaes que consideram a sntese simultnea do controlador
dinmico e de laos anti-windup. Um estudo preliminar neste sentido apresentado em
(GOMES DA SILVA Jr. et al., 2005).
31
4 COMPENSAO ANTI-WINDUP DINMICA
4.1 Introduo
Este captulo trata da sntese de compensadores anti-windup dinmicos para sistemas
contnuos lineares com o controle sujeito saturao. A compensao anti-windup atua
sobre um sistema sujeito a um atuador cujo modelo represente seus limites fsicos. A
compensao manifesta-se sempre que existir uma diferena entre os sinais entrada e
sada do atuador. Em sistemas cujas leis de controle foram projetadas desconsiderando-se
esta diferena, a compensao anti-windup contribui para a garantia de estabilidade da
origem do sistema em malha fechada e para a manuteno do desempenho nominal.
Como tratado anteriormente, considera-se a ocorrncia de perturbaes externas ao
sistema limitadas em norma L
2
. Neste captulo, dois mtodos de sntese so propostos
para garantir que em malha fechada o sistema tenha suas trajetrias limitadas e um certo
nvel de desempenho L
2
em sua sada regulada. Adicionalmente, na ausncia de per-
turbaes os mtodos permitem a garantia da estabilidade assinttica interna global
1
ou
local. O primeiro mtodo consiste na sntese de compensadores de ordem plena; ou seja:
a ordem (nmero de estados) do compensador equivale soma da ordem da planta e do
controlador. O segundo mtodo apresenta uma alternativa com ordem reduzida, podendo
assumir qualquer valor inferior ordem plena. Os desenvolvimentos buscam condies
tericas em forma de LMI, formuladas com o auxlio da nova condio de setor proposta
em (GOMES DA SILVA Jr.; TARBOURIECH., 2003) e discutida na seo anterior, bem
como funes candidatas de Liapunov quadrticas. Recursos algbricos como mudanas
de variveis clssicas propostas por (SCHERER; GAHINET; CHILALI, 1997) tambm
so utilizados em ambos mtodos. O Lema de Finsler empregado sempre que as con-
dies obtidas inicialmente sejam bilineares. Todas as condies obtidas podem, ento,
gurar em problemas de otimizao convexos: maximizao do limite de perturbaes
admissveis, o que constitui-se no problema de tolerncia perturbao, e a minimizao
da norma L
2
da sada regulada - problema de rejeio perturbao.
4.2 Denio do Problema
O sistema linear contnuo abaixo representa o modelo de uma planta.
_
_
_
x = A x +B u +B
w
w
y = C
y
x +D
y
u +D
y,w
w
z = C
z
x +D
z
u +D
z,w
w
(4.1)
1
A estabilidade global da origem em malha fechada depende da estabilidade em malha aberta da planta,
vide (SONTAG; SUSSMANN, 1990)
32
onde x
n
, u
m
, y
p
, z
r
, w
q
so - respectivamente - os vetores estado,
entrada, sadas medida e regulada, e perturbao. As matrizes A, B, B
w
, C
y
, D
y
, D
y,w
, C
z
,
D
z
, D
z,w
, so reais, constantes e de dimenses apropriadas. Os pares (A, B), (C
y
, A) so
respectivamente controlveis e observveis. O sistema sujeito a perturbaes externas
representadas pelo vetor w limitado em energia (isto , w L
2
) em funo de algum
escalar real positivo , conforme (4.2)
w
2
2
=
_
0
w
T
w dt
1
, t > 0. (4.2)
A entrada de controle u limitada em amplitude, da seguinte forma:
u
0
(i)
u
(i)
u
0
(i)
, i = 1, , m (4.3)
Para a planta representada por (4.1), considera-se que um controlador dinmico de ordem
n
c
foi projetado a priori para garantir requisitos de estabilidade e desempenho do sistema
em malha fechada, na ausncia de saturao. Seu modelo correspondente exibido em
(4.4),
_
x
c
= A
c
x
c
+B
c
u
c
+B
c,w
w
v
c
= C
c
x
c
+D
c
u
c
+D
c,w
w
(4.4)
onde x
c
nc
, u
c
= y, v
c
m
so respectivamente os vetores estado, entrada e sada
do controlador. A sada do controlador v
c
alimenta a entrada da planta u. Todavia, como
conseqncia dos limites a que a entrada da planta encontra-se sujeita devido saturao,
o controle de facto do sistema no necessariamente v
c
e pode ser representado por
u = sat
u
0
(v
c
), ou seja:
u = sat
u
0
(C
c
x
c
+D
c
u
c
+D
c,w
w) (4.5)
As seguintes condies so premissas deste trabalho.
M
1
a
| M
a
= I
m
D
c
D
y
M
1
b
| M
b
= I
m
D
y
D
c
(4.6)
O que equivale a dizer que a interconexo de (4.1) com (4.4) well-posed. A planta
pode apresentar uma matriz de transferncia estritamente prpria, o que requer a garantia
expressas pelas premissas (4.6).
O problema abordado neste captulo, ento, a sntese de um compensador anti-
windup dinmico que reduza tanto quanto possvel os indesejveis efeitos do windup cau-
sados pela saturao entrada da planta. Desta forma, visa-se preservar o desempenho
nominal original quando a operao d-se com o sinal de controle dentro dos nveis de
resposta linear do atuador, e garantir a estabilidade fora desta regio de operao. A idia
consiste em realizar-se uma correo nos estados do controlador de forma que a diferena
entre a entrada e sada do atuador seja minimizada. No caso esttico, a correo aplicada
dinmica do controlador nominal diretamente proporcional ao erro entre a entrada e
sada do atuador. Como conseqncia, a malha anti-windup somente atua sobre o sistema
quando o atuador encontra-se saturado. Na caso dinmico, a correo inserida no con-
trolador nominal corresponde a sada de um bloco dinmico de ordem plena ou reduzida,
cujos estados prolongam a ao compensatria sobre o controlador nominal mesmo aps
cessada a saturao do atuador. A motivao da compensao dinmica est na possibili-
dade de obter-se melhores ndices de desempenho pelo maior grau de liberdade da sntese
em relao ao compensador esttico.
33
AW
+
COMPENSADOR ANTIWINDUP
v_c
CONTROLADOR
PLANTA
SATURAO
y u
Figura 4.1: Sistema em Malha Fechada
Adicionalmente, o compensador ser sintetizado de forma a garantir-se que a sada
regulada apresente um limitante ao ganho L
2
da perturbao externa w em z. O modelo
do compensador anti-windup ser o seguinte:
_
x
aw
= A
aw
x
aw
+B
aw
u
0
(v
c
)
y
aw
= C
aw
x
aw
+D
aw
u
0
(v
c
)
(4.7)
Tem-se x
aw
naw
como o vetor estado do compensador anti-windup,
u
0
(v
c
) = v
c
sat
u
0
(v
c
), representando a diferena entre a entrada e sada do atuador e y
aw
nc
como
o vetor sada do compensador dinmico. As matrizes A
aw
, B
aw
, C
aw
, D
aw
so de dimen-
ses apropriadas. O sinal y
aw
gerado pelo compensador ser injetado no controlador (4.4).
O modelo do controlador torna-se:
_
x
c
= A
c
x
c
+B
c
u
c
+B
c,w
w +y
aw
v
c
= C
c
x
c
+D
c
u
c
+D
c,w
w
(4.8)
4.3 O Sistema em Malha Fechada
O sistema em malha fechada corresponde planta (4.1), o controlador (4.8) e o com-
pensador anti-windup (4.7) interligados conforme (4.5) e u
c
= y. A gura 4.1 ilustra
esta interconexo. As expresses para y, v
c
, x, x
c
e z sero desenvolvidas algebricamente
buscando-se uma representao para o sistema em malha fechada que evidencie a din-
mica do sistema aumentado
_
x x
c
x
aw
.
Tem-se que:
y = C
y
x +D
y
sat
u
0
(v
c
) D
y
v
c
+D
y
v
c
+D
y,w
w
= C
y
x D
y
u
0
(v
c
) +D
y
v
c
+D
y,w
w
(4.9a)
Denindo-se = (I
m
D
c
D
y
)
1
e D
c,w
= (D
c,w
+D
c
D
y,w
) segue que:
v
c
= C
c
x
c
+D
c
(C
y
x D
y
u
0
(v
c
) +D
y
v
c
+D
y,w
w) +D
c,w
w
(I
m
D
c
D
y
) v
c
= C
c
x
c
+D
c
D
y
x D
c
D
y
u
0
(v
c
) +D
c
D
y,w
w +D
c,w
w
= D
c
C
y
x + C
c
x
c
D
c
D
y
u
0
(v
c
) + (D
c,w
+D
c
D
y,w
) w
= D
c
C
y
x + C
c
x
c
D
c
D
y
u
0
(v
c
) +D
c,w
w
(4.9b)
34
Denindo-se
= I
m
+ D
c
D
y
pode-se escrever que:
x = Ax +Bsat
u
0
(v
c
) Bv
c
+Bv
c
+B
w
w
= Ax B
u
0
(v
c
) +Bv
c
+B
w
w
= Ax +B(D
c
C
y
x + C
c
x
c
D
c
D
y
u
0
(v
c
) + (D
c,w
+D
c
D
y,w
) w)
B
u
0
(v
c
) +B
w
w
= (A +BD
c
C
y
) x +BC
c
x
c
B(I
m
+ D
c
D
y
)
u
0
(v
c
)
+(B
w
+B(D
c,w
+D
c
D
y,w
)) w
= (A +BD
c
C
y
) x +BC
c
x
c
B
u
0
(v
c
) + (B
w
+BD
c,w
) w
(4.9c)
Seja agora
= I
p
+D
y
D
c
, segue que aplicando-se (4.9a) em (4.9b):
y = C
y
x D
y
u
0
(v
c
)
+D
y
(D
c
C
y
x + C
c
x
c
D
c
D
y
u
0
(v
c
) + (D
c,w
+D
c
D
w
) w) +D
y,w
w
= (I
p
+D
y
D
c
) C
y
x +D
y
C
c
x
c
D
y
(I
m
+ D
c
D
y
)
u
0
(v
c
)
+(D
y,w
+D
y
D
c,w
) w
=
C
y
x +D
y
C
c
x
c
D
y
u
0
(v
c
) + (D
y,w
+D
y
D
c,w
) w
(4.9d)
x
c
= A
c
x
c
+B
c,w
w +C
aw
x
aw
+D
aw
u
0
(v
c
)
+B
c
_
C
y
x +D
y
C
c
x
c
D
y
u
0
(v
c
) + (D
y,w
+D
y
D
c,w
) w
_
= B
c
C
y
x + (A
c
+B
c
D
y
C
c
) x
c
+C
aw
x
aw
_
B
c
D
y
D
aw
_
u
0
(v
c
)
+(B
c,w
+B
c
(D
y,w
+D
y
D
c,w
)) w
(4.9e)
z = C
z
x +D
z
sat(v
c
) D
z
v
c
+D
z
v
c
+D
z,w
w
= C
z
D
z
u
0
(v
c
) +D
z,w
w
+D
z
(D
c
C
y
x + C
c
x
c
D
c
D
y
u
0
(v
c
) + (D
c,w
+D
c
D
y,w
) w)
= (C
z
+D
z
D
c
C
y
) x +D
z
C
c
x
c
D
z
u
0
(v
c
)
+(D
z,w
+D
z
(D
c,w
+D
c
D
y,w
)) w
= (C
z
+D
z
D
c
C
y
) x +D
z
C
c
x
c
D
z
u
0
(v
c
) + (D
z,w
+D
z
D
c,w
) w
(4.9f)
A partir do desenvolvimento acima, considerando-se o vetor de estados (4.10),
T
=
_
x
T
x
T
c
x
T
aw
(4.10)
35
e as matrizes
A =
_
A +BD
c
C
y
BC
c
B
c
C
y
A
c
+B
c
D
y
C
c
_
, A =
_
A 0
0 0
_
B =
_
B
B
c
D
y
_
, B =
_
B
0
_
, B
1
=
_
0
I
_
, B
1
=
_
0 B
1
I
naw
0
_
B
w
=
_
B
w
+BD
c,w
B
c,w
_
, B
w
=
_
B
w
0
_
, C =
_
0 0 I
naw
C
z
=
_
C
z
+D
z
D
c
C
y
D
z
C
c
, C
z
=
_
C
z
0
, K
1
=
_
A
aw
C
aw
_
D
z,w
= D
z,w
+D
z
D
c,w
, D
y,w
= D
y,w
+D
c
D
c,w
, K
2
=
_
B
aw
D
aw
_
B
c,w
= B
c,w
+B
c
D
y,w
, K =
_
D
c
C
y
C
c
, K =
_
K 0
D
z
= D
z
, K
= D
c
D
y
, D
z
= D
z
, D
z,w
= D
z,w
, D
c,w
= D
c,w
(4.11)
possvel, ento, encontrar-se a seguinte expresso para o sistema em malha fechada:
_
= (A+B
1
K
1
C) (B B
1
K
2
)
u
0
(v
c
) +B
w
w
z = C
z
D
z
u
0
(v
c
) +D
z,w
w
(4.12)
4.4 Resultados Principais
Esta seo apresenta em forma de teoremas e corolrios, seguidos de suas respectivas
provas, as condies para a obteno das matrizes A
aw
, B
aw
, C
aw
, D
aw
do compensador
anti-windup proposto, de forma a garantir a estabilidade da origem em malha fechada, um
limitante para o ganho L
2
da perturbao sada controlada do sistema, e um conjunto
de inicializao do sistema tolerante perturbao de norma L
2
mxima, conhecida. Na
ausncia de perturbao a origem dever ser garantida assintoticamente estvel.
4.4.1 Sntese de Compensadores de ordem n
aw
= n +n
c
Para o caso em que o compensador seja da ordem n+n
c
, o seguinte teorema pode ser
enunciado.
Teorema 4.1. Se existem matrizes simtricas positivas denidas, X, Y
(n+nc)(n+nc)
,
uma matriz diagonal positiva S
mm
e matrizes H
(n+nc)(n+nc)
, L
nc(n+nc)
,
F, G
1
, Q
m(n+nc)
, Z
ncm
, e escalares postivos , , vericando as LMIs
(4.13a), (4.13b), (4.13c)
_
_
sym{AX +B
1
L}
H Y A+A
T
Y
F SB
T
Z
T
B
T
1
Q
A0
B
T
w
B
T
w
Y D
T
c,w
I
q
C
z
X C
z
D
z
S D
z,w
I
r
_
_
< 0
A0
= 2S K
S SK
T
(4.13a)
36
_
_
X
I
n+nc
Y
K
(i)
X F
(i)
K
(i)
G
1
(i)
u
2
0
(i)
_
_
> 0, i = 1, , m (4.13b)
> 0 (4.13c)
com N, M vericando
NM
T
= I
n+nc
Y X (4.13d)
ento para qualquer w satisfazendo (4.2) , o compensador (4.7) denido conforme (4.13e)
D
aw
= ZS
1
C
aw
= LM
T
B
aw
= S
1
_
QG
1
+SB
T
Y +Z
T
B
T
1
Y
_
N
T
A
aw
= N
1
_
H A
T
Y AX Y B
1
L
_
M
T
(4.13e)
garante que o sistema em malha fechada well-posed e:
1. As trajetrias so limitadas, permanecendo no elipside (P,
1
) para todo (0)
(P, ), com =
1
1
, w
2
2
1
;
2. z
2
2
w
2
2
+V (0), V (x) = x
T
Px;
3. quando w = 0, a origem do sistema em malha fechada localmente assintotica-
mente estvel para todo (0) (P,
1
).
onde P denido conforme segue.
P =
_
Y
N
T
_
, P
1
=
_
X
M
T
_
Prova. Prope-se uma funo que se for negativa denida ao longo das trajetrias do
sistema, o sistema em malha fechada tenha suas trajetrias convergentes origem na
ausncia de perturbao. Esta mesma funo deve propiciar a avaliao do sistema em
malha fechada com relao ao critrio de desempenho escolhido; ganho L
2
de w em z.
Seja esta funo denida conforme (4.14a).
L
=
V w
T
w +
1
z
T
z, > 0
(4.14a)
O primeiro termo do lado direito da equao acima constitui-se da derivada temporal de
primeira ordem de
V () =
T
P, P = P
T
> 0, P
2(n+nc)2(n+nc)
(4.14b)
A funo representada em (4.14b) efetivamente a candidata de Liapunov. Esta deve
ser positiva denida. Os demais termos em (4.14a), permitem abordar conjuntamente a
tolerncia e a rejeio perturbao.
Conforme (2.4b) a derivada temporal de primeira ordem de V () dada por:
V =
T
P +
T
P (4.14c)
A matriz P, simtrica positiva denida possui a seguinte estrutura:
P =
_
Y
N
T
_
, P
1
=
_
X
M
T
_
(4.14d)
37
Suponha-se que
L < 0, . Integrando-se o lado esquerdo desta desigualdade no
intervalo t
_
0,
_
, temos que T > 0,
_
T
0
Ldt = V ((T)) V ((0))
_
T
0
w
T
wdt +
1
_
T
0
z
T
z dt (4.14e)
L < 0, V ((T)) V ((0))
_
T
0
w
T
wdt +
1
_
T
0
z
T
z dt < 0 (4.14f)
Neste caso
V ((T)) < V ((0)) +
_
T
0
w
T
wdt
1
_
T
0
z
T
z dt (4.14g)
Segue ento que,
1
z
2
2
0. Ento,
V ((T)) < V ((0)) +w
2
2
, T > 0 (4.14h)
A inequao (4.14h) evidencia que, enquanto
L < 0, V () limitado - e por conseguinte,
suas trajetrias.
Na ausncia de perturbao, ou seja w
2
2
= 0,
L < 0 implica que as trajetrias
decresam ao avano do tempo. Como
V (0) = 0, as trajetrias do sistema em malha fe-
chada convergem para a origem. A partir da denio de conjuntos onde (0) (P, ),
e =
1
+
1
, a ausncia de perturbao implica em =
1
, uma vez que neste caso,
1
= 0. Como as trajetrias do sistema em malha fechada iniciam-se dentro de (P,
1
),
pela equao (4.14h) conclui-se que o conjunto elipsoidal (P,
1
) dene um con-
junto contrativo - vide (GOMES DA SILVA Jr., 1997).
No caso em que w = 0 - limitada em norma L
2
, conforme (4.2) - a partir de (4.14c)
tem-se:
1
z
2
2
< V ((0)) V (()) +w
2
2
(4.14i)
Por denio V (()) 0, ento obrigatoriamente:
z
2
2
< w
2
2
+V ((0)) (4.14j)
A inequao (4.14h) garante que as trajetrias do sistema em malha fechada connam-se
no conjunto (P,
1
), desde que (0) (P, ), uma vez que
1
= +
1
. Se
L < 0, a
integral
_
L()d t = V (()) V ((0)) w
2
2
+
1
z
2
2
< 0 tambm o . Pode-
se, ento, armar-se o disposto na inequao (4.14j): z
2
2
< w
2
2
+ V ((0)). De
outra forma, se (0) = 0 ento o limitante superior ao ganho L
2
de w em z dado por
; ou seja: z
2
2
< w
2
2
. Com base nestes desenvolvimentos, a funo
L mostrou-se
apropriada para vericar se as trajetrias do sistema em malha fechada so limitadas e ao
mesmo tempo determimar um limitante superior para o ganho L
2
de w para z.
Dando seguimento prova, expressar-se-
L matricialmente, buscando-lhe uma re-
presentao em forma de uma LMI denida negativa. Principiando-se por (4.14c), que
matricialmente representada apresenta-se como:
_
_
u
0
(v
c
)
w
_
_
T
_
_
sym{P (A+B
1
K
1
C)}
(B B
1
K
2
)
T
P 0
B
T
w
P 0 0
_
_
_
_
u
0
(v
c
)
w
_
_
(4.15a)
Os demais termos de
L expressos na mesma notao tornam-se:
w
T
w =
_
_
u
0
(v
c
)
w
_
_
T
_
_
0
0 0
0 0 I
q
_
_
_
_
u
0
(v
c
)
w
_
_
(4.15b)
38
1
z
T
z =
1
_
_
u
0
(v
c
)
w
_
_
T
_
_
C
T
z
D
T
z
D
T
z,w
_
_
_
C
z
D
z
D
z,w
_
_
u
0
(v
c
)
w
_
_
(4.15c)
Chega-se a uma expresso completa de (4.14a),
L =
_
_
u
0
(v
c
)
w
_
_
T
_
_
u
0
(v
c
)
w
_
_
=
_
_
sym{P (A+B
1
K
1
C)}
(B B
1
K
2
)
T
P 0
B
T
w
P 0 I
q
_
_
+
1
_
_
C
T
z
D
T
z
D
T
z,w
_
_
_
_
C
T
z
D
T
z
D
T
z,w
_
_
T
(4.15d)
necessrio determinar o conjunto (P, ) dentro do qual o sistema possa ser
inicializado tendo garantida a estabilidade de sua origem e algum nvel de desempenho
L
2
.
Considere-se que v
c
= K K
u
0
(v
c
) +D
c,w
w, e dena-se o conjunto S (u
0
) como
segue.
S (u
0
)
=
_
|
n+nc+naw
,
K
(i)
G
(i)
u
0
(i)
, i = 1, , m
_
(4.16a)
Pelo lema 2.1, se existe uma matriz G =
_
G
1
G
2
conforme (4.16a) e um
elemento de S (u
0
), ento possvel armar que:
u
0
(v
c
)
T
T
_
_
u
0
(v
c
)
_
G K
D
c,w
_
_
u
0
(v
c
)
w
_
_
_
_
0 (4.16b)
para qualquer matriz T diagonal positiva denida.
interessante notar-se que o lema 2.1 menciona o conjunto S(u
0
) como em (4.16a),
pormapresenta uma desigualdade - equao (2.3e) - expressa emtermos de
u
0
(K). Em
(4.16b), uma desigualdade semelhante expressa-se em termos de
u
0
(v
c
). A aplicao do
lema 2.1 condio de setor (4.16a) requer que ambas desigualdades sejam equivalentes,
o que verdadeiro.
Denindo-se r
= G + K
u
0
(v
c
) + D
c,w
w, segue de (4.9b) e (4.11) que v
c
r =
(K G). Ento, para todo S(u
0
) tem-se que
v
c
(i)
r
(i)
u
0
(i)
. Deste ponto em
diante a prova do lema 2.1 justica (4.16b).
Multiplicando-se (4.16b) por 2 resulta em
u
0
(v
c
)
T
T
_
_
u
0
(v
c
)
_
G K
D
c,w
_
_
u
0
(v
c
)
w
_
_
_
_
_
_
u
0
(v
c
)
_
G K
D
c,w
_
_
u
0
(v
c
)
w
_
_
_
_
T
T
u
0
(v
c
) 0
(4.16c)
39
o que expresso por:
_
_
u
0
(v
c
)
w
_
_
T
2
_
_
u
0
(v
c
)
w
_
_
2
=
_
_
0
TG 2T TK
K
T
T
0 D
T
c,w
T 0
_
_
0
(4.16d)
A expresso
no precisa ser negativa denida em todo os espao
(n+nc+naw)
, uma
vez que a modelagem da saturao do atuador vlida somente enquanto S(u
0
).
A matriz
2
representa a pertinncia de ao setor S(u
0
). Assim, se S(u
0
), ento
2
0. Como
+
2
, se
+
2
< 0, ento
< 0, S(u
0
). Pelo complemento
de Schur possvel representar-se
+
2
< 0 conforme:
3
=
_
_
sym{P (A+B
1
K
1
C)}
(B B
1
K
2
)
T
P +TG
A1
B
T
w
P D
T
c,w
T I
q
C
z
D
z
D
z,w
I
r
_
_
< 0
A1
= 2T TK
K
T
T
(4.16e)
Por convenincia, o termo D
c,w
foi substitudo pelo seu equivalente D
c,w
.
Da expresso (4.16e), possvel armar-se que se
3
< 0, ento
L < 0, S(u
0
).
Conseqncia direta
V < 0 uma vez que o termo (1, 1) de (4.16e) vericar-se-ia denido
negativo. Alm disto, (4.14h) verdadeira. Sendo
V < 0, S(u
0
), e considerando-
se a presena de perturbaes com norma L
2
_
1
; a exemplo da expresso (4.14h),
possvel escrever-se:
V ((t)) < V ((0)) +w
2
2
(4.16f)
Mas conforme (4.2), w
2
2
1
. Ento,
V ((t)) < V ((0)) +
1
(4.16g)
Sejam e escalares reais positivos tais que:
1
= +
1
(4.16h)
e = V ((0)). Ento, pelas denies de conjuntos elipsoidais (2.4c), comparando-se as
expresses (4.16g) e (4.16h) conclui-se que todas as trajetrias inicializadas em (P, )
jamais deixaro o elipside (P,
1
). Uma conseqncia disto que (P,
1
)
S(u
0
). , portanto, necessrio encontrar-se algum que satisfaa (4.16h). O lema 2.5
trata exatamente da garantia da pertinncia do elipside (P,
1
) ao conjunto S (u
0
),
resolvendo esta questo.
Assim, conforme o lema 2.5, se (P,
1
) S (u
0
), ento:
_
P
K
(i)
G
(i)
u
2
0
(i)
_
> 0, i = 1, , m (4.17a)
Finalmente, a partir de (4.16h), para garantir-se um conjunto de inicializao no vazio,
com > 0, deve-se ter:
< 0 (4.17b)
40
Uma vez determinados os termos para a garantia de estabilidade da origem do sistema
em malha fechada caso
3
< 0, parte-se agora para a representao de
3
< 0, em
(4.16e), por uma LMI.
Para tanto dena-se e S como:
=
_
X I
n+nc
M
T
0
_
, S = T
1
(4.18)
Multiplicando-se (4.16e) pela esquerda e direita, respectivamente por:
BLKDG
__
T
S I
q+r
_
(4.19a)
e seu transposto, chega-se a:
4
=
_
_
sym
_
T
P (A+B
1
K
1
C)
_
S (B B
1
K
2
)
T
P +G
A0
B
T
w
P D
T
c,w
I
q
C
z
D
z
S D
z,w
I
r
_
_
< 0 (4.19b)
Onde:
sym
_
T
P (A+B
1
K
1
C)
_
=
_
sym{AX +B
1
C
aw
M
T
}
A2
Y A+A
T
Y
_
A2
= Y AX +Y B
1
C
aw
M
T
+NA
aw
M
T
+A
T
SB
T
P = S
_
B
T
0
_
I
n+nc
Y
0 N
T
_
=
_
SB
T
SB
T
Y
SK
T
2
B
T
1
P = S
_
D
T
aw
B
T
1
B
T
aw
_
I
n+nc
Y
0 N
T
_
=
_
SD
T
aw
B
T
1
SD
T
aw
B
T
1
Y +SB
T
aw
N
T
B
T
w
P =
_
B
T
w
0
_
I
n+nc
Y
0 N
T
_
=
_
B
T
w
B
T
w
Y
C
z
=
_
C
z
0
_
X I
n+nc
M
T
0
_
=
_
C
z
X C
z
G =
_
G
1
G
2
_
X I
n+nc
M
T
0
_
=
_
G
1
X +G
2
M
T
G
1
K =
_
K 0
_
X I
n+nc
M
T
0
_
=
_
KX K
(4.19c)
Usando-se uma mudana de variveis semelhante proposta em (SCHERER; GAHINET;
CHILALI, 1997), transforma-se
4
< 0 de (4.19b) em uma LMI. Assim, seja feita a
seguinte mudana de variveis:
L = C
aw
M
T
Z = D
aw
S
H = Y AX +Y B
1
L +NA
aw
M
T
+A
T
Q = G
1
SBY Z
T
B
T
1
Y SB
T
aw
N
T
F = G
1
X +G
2
M
T
(4.19d)
Substituindo-se as expresses de (4.19c) em (4.19b) e aplicando-se a substituio de va-
riveis indicada em (4.19d) chega-se a (4.13a). Observe-se que no existe nenhuma res-
trio s matrizes N e M exceto a estrutura interna de P denida a priori, o que justica
(4.13d).
41
Isolando-se as incgnitas A
aw
, B
aw
, C
aw
e D
aw
, em (4.19d), obtm-se (4.13e).
Multiplicando-se (4.17a) em ambos os lados por:
BLKDG
__
T
1
_
(4.20)
obtm-se:
_
T
0 1
_ _
P
K
(i)
G
(i)
u
2
0
(i)
_ _
0 1
_
(4.21)
Em especial, o termo (1, 1) de (4.21) equivale a:
T
P =
_
X M
I
n+nc
0
_ _
Y
N
T
_ _
X I
n+nc
M
T
0
_
=
_
X I
n+nc
I
n+nc
Y
_
(4.22)
Esta transformao de similaridade faz de (4.17a), (4.13b).
Se (4.13a) se verica,
A0
< 0 (
A0
encontra-se em (4.13a)). Obrigatoriamente
A1
< 0. A partir disto, assegura-se a wellposedness do sistema em malha-fechada, da
seguinte forma:
a) Seja especicamente para esta vericao, correspondente ao mapeamento v
c
u
0
(v
c
). Fazendo-se V = T e D = K
, verica-se a partir de
A1
a condio
2V +V D +D
T
V < 0 do lema 2.4.
b) Ento I D no singular. A funo pode ser reescrita como v
c
= K Kv
c
+
D
c,w
w.
c) O jacobiano de
u
0
(v
c
), J
u
0
(v
c
) = I Jsat
u
0
(v
c
).
d) Substituindo-se v
c
por sua expresso equivalente, tem-se J
u
0
(v
c
) = I + K
, ou
J
u
0
(v
c
) = I D, no singular.
e) Ento, pelo lema 2.3, existe uma nica funo globalmente Lipschitz
u
0
(v
c
) :
m
m
, tal que F(
u
0
(v
c
)) = v
c
, para todo v
c
m
, o que mostra que o sistema emmalha
fechada well-posed
2
.
Adicionalmente, se (4.13a) se verica, dene-se X e Y . Observando-se (4.13d)
garante-se que N e M so matrizes no singulares, de modo que tambm seja no
singular. Desta forma, todas as transformaes de similaridade so inversveis, e con-
seqentemente (4.16e) vericada para as matrizes A
aw
, B
aw
, C
aw
e D
aw
denidas em
(4.13e). Posto isto, pelo complemento de Schur, possvel vericar-se que
L < 0 desde
que (P,
1
) S(u
0
). Isto vericado da seguinte forma:
a) Sendo (4.13b) vlido, e (0) (P, ), segue que as trajetrias do sistema em malha
fechada nunca abandonam (P,
1
).
b) Assim, pelo lema 2.5, nestas circunstncias obrigatoriamente S(u
0
), e portanto
L < 0. O que prova os itens 1 e 2 do teorema 4.1.
Suponha-se agora que w = 0 e (P,
1
), ento segue que S(u
0
). Neste
caso, com (4.13a) satisfeita assegura-se que
V < 0. Como esta condio vlida para
todo (P,
1
), segue que esta a regio em que a estabilidade assinttica da origem
do sistema em malha fechada garantida. Isto completa a prova do tem 3 do teorema
4.2.
2
Para maiores detalhes, vide (GRIMM et al., 2003)
42
Depois da prova do teorema 4.1, necessrio especicar os parmetros do compensa-
dor anti-windup ali proposto. A obteno das matrizes A
aw
, B
aw
, C
aw
e D
aw
denidas em
(4.13e) requer a denio das matrizes M e N de acordo com (4.13d). As matrizes M e
N podem ser obtidos mediante a decomposio LU de I
n+nc
Y X emN e M
T
, bastante
apropriada para pela robustez numrica conferida esta tcnica. Alternativamente pode-
se assumir uma das matrizes como identidade, e obter-se a outra por substituio direta
em (4.13e).
Todo o desenvolvimento anterior precedido pelo teorema 4.1 refere-se estabilidade
num mbito local. Em casos em que a origem da planta seja assintoticamente estvel em
malha aberta, sempre existir uma soluo para a sntese do compensador que garanta a
estabilidade assinttica global da origem - na ausncia de perturbaes. Somente para
estes casos, segue o seguinte corolrio.
Corolrio 4.1. Se existemmatrizes simtricas positivas denidas, X, Y
(n+nc)(n+nc)
,
uma matriz diagonal positiva S
mm
e matrizes H
(n+nc)(n+nc)
, L
nc(n+nc)
,
Q
m(n+nc)
, Z
ncm
, e um escalar postivo , vericando a LMI, (4.13c)
_
_
sym{AX +B
1
L}
H Y A+A
T
Y
KX SB
T
Z
T
B
T
1
Q
A0
B
T
w
B
T
w
Y D
T
c,w
I
q
C
z
X C
z
D
z
S D
z,w
I
r
_
_
< 0
(4.23a)
com N, M vericando
NM
T
= I
n+nc
Y X (4.23b)
ento para qualquer w L
2
, o compensador (4.7) denido conforme (4.13e) garante que
o sistema em malha fechada well-posed e:
1. As trajetrias so limitadas, para todo (0)
2(n+nc)
, com qualquer w L
2
.
2. z
2
2
w
2
2
+V (0)
3. quando w = 0, a origem do sistema em malha fechada globalmente assintotica-
mente estvel
Prova. Tomando-se G = K, (4.13b) verica-se para todo
2(n+nc)
, o que torna
desnecessrias as LMIs (4.13b) e (4.13c) do caso local. No existe mais restries para
os estados iniciais seno o prprio espao vetorial em que so denidos. O mesmo diz-se
das trajetrias em malha fechada. Assim, no h porque restringir w alm do espao L
2
.
Isto torna desnecessria a varivel . Desta vez Q = KSBY Z
T
B
T
1
Y SB
T
aw
N
T
,
e o restante da prova imita a do teorema 4.1.
4.4.2 Sntese de Compensadores de ordem n
aw
< n +n
c
Em geral, um compensador anti-windup de ordem plena ter na implementao des-
vantagens de custo e complexidade com relao a compensadores de menor ordem. O
teorema 4.2 aborda a sntese de compensadores de ordem reduzida - ou seja n
aw
< n+n
c
- cujas condies sucientes para existncia de uma soluo so expressas por inequa-
es matriciais, entre elas, uma BMI. Adaptaes sero feitas a partir do teorema 4.1 para
permitir a exibilidade na escolha da ordem do compensador anti-windup.
43
Teorema 4.2. Se existirem a matriz simtrica positiva denida W
(n+nc+naw)(n+nc+naw)
, uma matriz diagonal positiva S
mm
, matrizes K
1
(naw+nc)(naw)
, Y
m(n+nc+naw)
, Z
2
(naw+nc)m
, e escalares reais positivos ,
vericando as inequaes matriciais abaixo relacionadas,
_
_
sym
_
W (A+B
1
K
1
C)
T
_
SB
T
+Z
T
2
B
T
1
+Y
A0
B
T
w
D
T
c,w
I
q
C
z
W D
z
D
z,w
I
r
_
_
< 0 (4.24a)
_
W
K
(i)
W Y
(i)
u
2
0
(i)
_
> 0 (4.24b)
> 0 (4.24c)
ento o compensador de anti-windup (4.7) com,
A
aw
=
_
I
naw
0
K
1
B
aw
=
_
0 I
nc
K
1
C
aw
=
_
I
naw
0
Z
2
S
1
D
aw
=
_
0 I
nc
Z
2
S
1
(4.25)
garante que o sistema em malha fechada well-posed e:
1. As trajetrias so limitadas, permanecendo no elipside (W
1
,
1
) para todo
(0) (W
1
, ), com =
1
1
2. z
2
2
w
2
2
+V (0)
3. quando w = 0, a origem do sistema em malha fechada local e assintoticamente
estvel para todo (0) (W
1
,
1
)
A prova deste teorema apresenta a mesma seqncia de passos contidos na prova do
teorema 4.1.
Prova. Seja W = P
1
. Como mostrado no teorema 4.1 a vericao de (4.16e) implica
que
L < 0, desde que S(u
0
). Tal fato verica os itens 1, 2 e 3 do presente teorema.
Para ns de manipulao algbrica, multiplica-se (4.16e) em ambos os lados pela matriz:
BLKDG
__
W S I
q+r
_
e obtm-se:
_
_
sym
_
W (A+B
1
K
1
C)
T
_
S (B B
1
K
2
)
T
+GW
A0
B
T
w
D
T
c,w
I
q
C
z
W D
z
S D
z,w
I
r
_
_
< 0 (4.26)
Desenvolvendo-se os termos de (4.26) e assumindo-se Z
2
= K
2
S e Y = GW, obtm-se
a expresso abaixo:
_
_
sym
_
WA
T
+B
1
K
1
CW
_
SB
T
Z
T
2
B
1
+Y
A0
B
T
w
D
T
c,w
I
q
C
z
W D
z
S D
z,w
I
r
_
_
< 0 (4.27)
44
Pelo lema 2.5, se a condio expressa pela LMI (4.17a) for verdadeira as trajetrias do
sistema emmalha fechada permanecemdentro do conjunto S(u
0
). Ento, para expressar
esta condio em termos da nova varivel W, multiplica-se (4.17a) em ambos os lados
pela matriz:
BLKDG
__
W 1
_
e obtm-se (4.24b). A LMI (4.24c) faz-se necessria para denir-se um conjunto de esta-
dos iniciais no vazio.
Uma vez obtida uma soluo satisfatria para as matrizes W, K
1
, S, Z
2
, Y, e a
partir das denies em (4.11), obtm-se as matrizes A
aw
, B
aw
, C
aw
, D
aw
conforme
apresentado em (4.25).
A exemplo do corolrio 4.1, o seguinte corolrio estende o disposto no teorema 4.2
ao mbito global, nos casos em que, em malha aberta, a origem da planta seja assintoti-
camente estvel.
Corolrio 4.2. Se existirem a matriz simtrica positiva denida W
(n+nc+naw)(n+nc+naw)
, uma matriz diagonal positiva S
mm
, matrizes K
1
(naw+nc)(naw)
, Z
2
(naw+nc)m
, e escalares reais positivos , vericando a inequa-
o abaixo
_
_
sym
_
W (A+B
1
K
1
C)
T
_
SB
T
+Z
T
2
B
T
1
+KW
A0
B
T
w
D
T
c,w
I
q
C
z
W D
z
D
z,w
I
r
_
_
< 0 (4.28)
ento para qualquer w L
2
, o compensador (4.7) denido conforme (4.13e) garante que
o sistema em malha fechada well-posed e:
1. As trajetrias so limitadas, para todo (0)
(n+nc+naw)
, com qualquer w L
2
.
2. z
2
2
w
2
2
+V (0)
3. quando w = 0, a origem do sistema em malha fechada globalmente assintotica-
mente estvel.
Como no corolrio 4.1, basta considerar G = K. Note-se que neste caso, Y em (4.24a)
aqui substitudo por KW.
importante destacar que o produto B
1
K
1
CW em (4.27) e em (4.28) concentra a di-
culdade do projeto por constituir-se de umtermo bilinear em K
1
e W. Assimesta restrio
torna-se uma BMI, e no pode ser otimizada globalmente, por no ser uma representa-
o convexa. Utilizando-se diretamente estas condies, obtm-se resultados numricos
atravs de esquemas de relaxao ao conjunto de inequaes matriciais (4.24a)-(4.24b)-
(4.24c). Para maiores detalhes sobre esta tcnica, vide (PAIM, 2003).
Como forma de contornar a impossibilidade da otimizao global, o lema 2.2 - ou
como conhecido, o Lema de Finsler - mostra-se um importante instrumento algbrico
por representar uma inequao matricial de forma equivalente, mediante a insero de
multiplicadores escalares ou matriciais. Aplicar o lema 2.2 ao problema em estudo per-
mitir representar as BMIs (4.27) e (4.28) de formas equivalentes, e inserindo-se multipli-
cadores matriciais. Estes multiplicadores tero sua estrutura, que a priori livre, xada
para que o resultado nal seja uma LMI. Assim, pode-se considerar-se K
1
e W simul-
taneamente na busca de uma soluo numrica e evitar-se esquemas de relaxao. Esta
45
proposta ser agora desenvolvida. A inteno obter-se uma representao convexa do
problema de sntese de compensadores de anti-windup dinmicos com ordem reduzida
O corolrio seguinte um resultado intermedirio na busca da representao linear do
problema. Justica-se por constituir-se em alternativa ao teorema 4.2 na otimizao local.
O corolrio 4.3 consiste em separar-se os termos K
1
e W no bloco (1, 1) da inquao
(4.24a) mediante a adio de multiplicadores matriciais - J
1
e J
2
- de ordem apropriada.
Corolrio 4.3. Se existirem W = W
T
> 0
(n+nc+naw)(n+nc+naw)
, uma matriz di-
agonal positiva S
mm
, matrizes K
1
(naw+nc)(naw)
, Y
m(n+nc+naw)
, Z
2
(naw+nc)m
, J
1
j
1
e J
2
j
2
; onde j
1
= (n + n
c
+ n
aw
+ m + q + r) (n
aw
+ m + q + r)
e j
2
= (n
aw
+ m + q + r) (n
aw
+ m + q + r), e existirem escalares reais positivos , veri-
cando (4.24b), (4.24c) e a inequao matricial abaixo,
_
M
1
+ sym{J
1
R}
M
T
2
+J
2
R J
T
1
sym{J
2
}
_
< 0 (4.29a)
onde
M
1
=
_
_
sym{AW}
SB
T
+Z
T
2
B
1
+Y
A0
B
T
w
D
T
c,w
I
q
C
z
W D
z
D
z,w
I
r
_
_
M
2
=
_
_
B
1
K
1
0 0
0 0 0
0 0 0 0
_
_
,
R =
_
_
CW
0 I
m
0 0 I
q
0 0 0 I
r
_
_
(4.29b)
ento o controlador (4.7) denido em (4.25) garante o disposto nos itens 1, 2 e 3 do
Teorema 4.2.
Prova. Partindo-se de (4.24a), possvel reescr-la no formato
M= M
1
+ sym{M
2
R} < 0 (4.30a)
onde as matrizes M
1
, M
2
e
R esto denidas em (4.29b). Seguindo um raciocnio se-
melhante ao feito em (TARBOURIECH; GOMES DA SILVA Jr.; BENDER, 2006) para
sistemas de tempo discreto, representa-se (4.30a) na forma:
M =
_
I
A
R
T
_
M
1
M
T
2
0
_ _
I
A
R
_
< 0 (4.30b)
Em (4.30b), a matriz I
A
apresenta dimenses apropriadas, neste caso de ordem n + n
c
+
n
aw
+ m + q + r. Ento, pelos itens 2 e 4 do lema de 2.2, existem matrizes J
1
e J
2
de
dimenses apropriadas tais que 4.30a seja equivalente a:
_
M
1
M
T
2
0
_
+ sym
__
J
1
J
2
_
_
R I
B
_
< 0 (4.30c)
onde a matriz I
B
tambm apresenta dimenses apropriadas, neste caso de ordem n
aw
+
m+q+r. Verica-se, ento, que (4.30c) e (4.29a) so equivalentes. As demais disposies
deste corolrio seguem a prova do Teorema 4.2.
46
Como todos os desenvolvimentos com garantias locais de estabilidade foram estendi-
dos para o caso global, o corolrio 4.4, a seguir enunciado, estende o anterior para o caso
em que a origem do sistema em malha aberta globalmente estvel.
Corolrio 4.4. Se existirem a matriz simtrica positiva denida W
(n+nc+naw)(n+nc+naw)
, uma matriz diagonal positiva S
mm
, matrizes K
1
(naw+nc)(naw)
, Z
2
(naw+nc)m
, J
1
j
1
e J
2
j
2
; onde
j
1
= (n + n
c
+ n
aw
+ m + q + r) (n
aw
+ m + q + r) e
j
2
= (n
aw
+ m + q + r) (n
aw
+ m + q + r), e existirem escalares reais positivos , veri-
cando a inequao abaixo,
_
M
3
+ sym{J
1
R}
M
T
2
+J
2
R J
T
1
sym{J
2
}
_
< 0 (4.31a)
onde
M
3
=
_
_
sym{AW}
SB
T
+Z
T
2
B
1
+KW
A0
B
T
w
D
T
c,w
I
q
C
z
W D
z
D
z,w
I
r
_
_
M
2
=
_
_
B
1
K
1
0 0
0 0 0
0 0 0 0
_
_
,
R =
_
_
CW
0 I
m
0 0 I
q
0 0 0 I
r
_
_
(4.31b)
ento para qualquer w L
2
, o compensador (4.7) denido conforme (4.13e) garante que
o sistema em malha fechada well-posed e:
1. As trajetrias so limitadas, para qualquer w L
2
.
2. z
2
2
w
2
2
+V (0)
3. quando w = 0, a origem do sistema em malha fechada globalmente assintotica-
mente estvel.
A extenso das condies para o caso global considera sempre G = K.
Como observado anteriormente, as condies para existncia de um controlador de
ordem reduzida apresentavam termos bilineares. O mesmo diz-se dos corolrios 4.3 e
4.4, bilineares em J
1
R e J
2
R. A m de obter-se uma representao completa em termos
de LMI, to somente, ser mostrado agora uma estrutura especial para J
1
e J
2
que permite
a representao do problema apenas por LMIs.
Teorema 4.3. Se existirem W = W
T
> 0
(n+nc+naw)(n+nc+naw)
, a matriz dia-
gonal positiva S
mm
, matrizes K
1
(naw+nc)(naw)
, Y
m(n+nc+naw)
, Z
2
(naw+nc)m
, J
111
(n+nc+naw)naw
, J
112
(n+nc+naw)m
, J
113
(n+nc+naw)q
, J
114
(n+nc+naw)r
, J
122
mm
, J
123
mq
, J
124
mr
, J
132
qm
, J
133
qq
,
J
134
qr
, J
142
rm
, J
143
rq
, J
144
rr
, J
212
nawm
, J
213
nawq
,
J
214
nawr
, J
222
mm
, J
223
mq
, J
224
mr
, J
232
qm
, J
233
qq
,
J
234
qr
, J
242
rm
, J
243
rq
, J
244
rr
e escalares reais positivos ,
vericando as LMIs (4.24b), (4.24c) e,
J
T
111
C
T
+CJ
111
< 0 (4.32a)
47
com o resultado J
111
empregado em,
_
1
2
3
_
< 0 sendo,
1
=
_
11
12
A0
+ sym{J
122
}
13
D
T
c,w
+J
132
+J
T
123
I
q
+ sym{J
112
}
14
D
z
+J
142
+J
T
124
D
z,w
+J
143
+J
T
134
15
_
11
= sym{(A+J
111
C) W}
12
= SB
T
+Z
2
B
T
1
+Y +J
T
112
13
= B
T
w
+J
T
113
14
= C
z
W +J
T
114
15
= I
r
+ sym{J
144
}
2
=
_
_
K
T
1
B
T
1
+CW J
T
111
+J
212
+J
213
+J
214
J
T
112
J
222
J
T
122
J
233
J
T
132
J
224
J
T
142
J
T
113
J
223
J
T
123
J
233
J
T
133
J
234
J
T
143
J
T
114
J
224
J
T
124
J
233
J
T
134
J
244
J
T
144
_
3
=
_
_
2I
naw
J
T
212
sym{J
222
}
J
T
213
J
212
J
T
212
sym{J
233
}
J
T
214
J
212
J
T
212
J
212
J
T
212
sym{J
244
}
_
_
(4.32b)
ento o controlador (4.7) denido em (4.25) garante o disposto nos itens 1, 2 e 3 do
Teorema 4.2.
Prova. Desenvolvendo-se a expresso (4.29a) obtm-se,
M
F
=
_
_
sym{AW}
SB
T
+Z
2
B
T
1
+Y
A0
B
T
w
D
T
c,w
I
q
C
z
W D
z
D
z,w
I
r
K
T
1
B
T
1
0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
_
_
+sym
_
_
_
_
J
111
CW J
112
J
113
J
114
J
111
J
112
J
113
J
114
J
121
CW J
122
J
123
J
124
J
121
J
122
J
123
J
124
J
131
CW J
132
J
133
J
134
J
131
J
132
J
133
J
134
J
141
CW J
142
J
143
J
144
J
141
J
142
J
143
J
144
J
211
CW J
212
J
213
J
214
J
211
J
212
J
213
J
214
J
221
CW J
222
J
223
J
224
J
221
J
222
J
223
J
224
J
231
CW J
232
J
233
J
234
J
231
J
232
J
233
J
234
J
241
CW J
242
J
243
J
244
J
241
J
242
J
243
J
244
_
_
_
_
(4.33a)
48
ou seja,
M
F
=
_
1
2
3
_
< 0
1
=
_
11
12
A0
+ sym{J
122
}
13
D
T
c,w
+J
132
+J
T
123
I
q
+ sym{J
133
}
14
D
z
+J
142
+J
T
124
D
z,w
+J
143
+J
T
134
15
_
11
= sym{(A+J
111
C) W}
12
= SB
T
+Z
2
B
T
1
Y +J
121
CW +J
T
112
13
= B
T
w
+J
131
CW + J
T
113
14
= C
z
WJ
141
CW +J
T
114
15
= I
r
+ sym{J
144
}
2
=
_
_
K
T
1
B
T
1
+J
211
CW J
T
111
J
212
J
T
121
J
213
J
T
131
J
214
J
T
141
J
221
CW J
T
112
J
222
J
T
122
J
223
J
T
132
J
224
J
T
142
J
231
CW J
T
113
J
232
J
T
123
J
233
J
T
133
J
234
J
T
143
J
241
CW J
T
114
J
242
J
T
124
J
243
J
T
134
J
244
J
T
144
_
3
=
_
_
sym{J
211
} J
212
J
T
221
J
213
J
T
231
J
214
J
T
241
J
221
J
T
212
sym{J
222
} J
223
J
T
232
J
224
J
T
242
J
231
J
T
213
J
232
J
T
223
sym{J
233
} J
234
J
T
243
J
241
J
T
214
J
242
J
T
224
J
243
J
T
234
sym{J
244
}
_
_
(4.33b)
Se J
ij1
= 0, i = 1, 2; j = 2, 3, 4 e J
211
= I
naw
, compondo a seguinte estrutura nos
multiplicadores:
J
1
=
_
_
J
111
J
112
J
113
J
114
0 J
122
J
123
J
124
0 J
132
J
133
J
134
0 J
142
J
143
J
144
_
_
, J
2
=
_
_
I
naw
J
212
J
213
J
214
0 J
222
J
223
J
224
0 J
232
J
233
J
234
0 J
242
J
243
J
244
_
_
ento (4.33b) torna-se (4.32b). As demais disposies seguem a prova do Teorema 4.2.
A LMI (4.32a) tem como objetivo evitar a determinao a priori de J
111
. Note-se que
J
111
aparece no-linearmente no termo sym{(A+J
111
C) W} em (4.33b). Considere-se
J
111
composto por J
111
1
nnaw
, J
111
2
ncnaw
, J
111
3
nawnaw
, da seguinte
forma: J
111
=
_
_
J
111
1
J
111
2
J
111
3
_
_
. Desenvolvendo-se A+J
111
C, tem-se:
_
_
A+BD
c
C
y
BC
c
0
B
c
C
y
A
c
+B
c
D
y
C
c
0
0 0 0
_
_
+
_
_
J
111
1
J
111
2
J
111
3
_
_
_
0 0 I
naw
=
_
A 0
0 J
111
3
_
Como os autovalores de (A+J
111
C) correspondema unio dos espectros de Ae de J
111
3
,
e por denio A estvel, A ser negativa denida se e somente se o espectro de J
111
3
estiver contido em C
, o que garantido por (4.32a).
Estendendo as condies do Teorema 4.3 para garantir a estabilidade global da origem
de (4.12) em malha fechada, tem-se o seguinte corolrio.
Corolrio 4.5. Se existirem W = W
T
> 0
(n+nc+naw)(n+nc+naw)
, a matriz dia-
gonal positiva S
mm
, matrizes K
1
(naw+nc)(naw)
, Z
2
(naw+nc)m
, J
111
49
(n+nc+naw)naw
, J
112
(n+nc+naw)m
, J
113
(n+nc+naw)q
, J
114
(n+nc+naw)r
, J
122
mm
, J
123
mq
, J
124
mr
, J
132
qm
, J
133
qq
,
J
134
qr
, J
142
rm
, J
143
rq
, J
144
rr
, J
212
nawm
, J
213
nawq
,
J
214
nawr
, J
222
mm
, J
223
mq
, J
224
mr
, J
232
qm
, J
233
qq
,
J
234
qr
, J
242
rm
, J
243
rq
, J
244
rr
e escalares reais positivos , ,
vericando a LMI (4.32a), com o resultado aplicado em
_
1
2
3
_
< 0
1
=
_
2
A0
+ sym{J
122
}
3
D
T
c,w
+J
132
+J
T
123
I
q
+ sym{J
112
}
4
D
z
+J
142
+J
T
124
D
z,w
+J
143
+J
T
134
5
_
1
= sym{(A+J
111
C) W}
2
= SB
T
+Z
T
2
B
T
1
+KW +J
T
112
3
= B
T
w
+J
T
113
4
= C
z
W +J
T
114
5
= I
r
sym{J
144
}
2
=
_
_
K
T
1
B
T
1
+CW J
T
111
+J
212
+J
213
+J
214
J
T
112
J
222
J
T
122
J
233
J
T
132
J
224
J
T
142
J
T
113
J
223
J
T
123
J
233
J
T
133
J
234
J
T
143
J
T
114
J
224
J
T
124
J
233
J
T
134
J
244
J
T
144
_
3
=
_
_
2I
naw
J
T
212
sym{J
222
}
J
T
213
J
212
J
T
212
sym{J
233
}
J
T
214
J
212
J
T
212
J
212
J
T
212
sym{J
244
}
_
_
(4.34)
ento o controlador (4.7) denido em (4.25) garante o disposto nos itens 1 e 2 do corol-
rio 4.4.
A prova deste, imita a prova do corolrio 4.4.
Expressar as condies sucientes relativas estabilidade e desempenho do sistema
em forma de LMI exigiu a representao das condies primeiramente obtidas em uma
forma equivalente atravs do lema de Finsler, e a posterior xao de uma estrutura para
seus multiplicadores, suprimindo graus de liberdade. A soluo do problema expresso por
LMIs uma forma apropriada para inicializar-se algoritmos de soluo do mesmo pro-
blema expresso por BMIs - como o teorema 4.2 e o corolrio 4.2. Alm da sensibilidade
inicializao dos algoritmos para soluo de BMIs, a relaxao da condies bilineares
em (4.24a) e (4.29a), por exemplo, requer a escolha inicial da matriz W ou de K
1
que
respeitem a todas as suas restries. Tanto W como K
1
so matrizes chave na soluo do
problema, pois W vincula-se funo de Liapunov usada para garantir a estabilidade da
origem, e K
1
dene a dinmica do compensador anti-windup, objeto da sntese. Logo,
a escolha inicial quer de W, quer de K
1
no trivial. Assim posto, a soluo prvia
de uma LMI possibilita valores seguramente satisfatrios de ambas matrizes para iniciar
algum algoritmo de otimizao sob restries expressas por BMIs, o que potencialmente
melhora os resultados obtidos com as LMIs.
50
4.5 Problemas de Otimizao
As condies nos teorema 4.1, corolrio 4.1, teorema 4.3, e corolrio 4.5 so LMIs.
Ento, se um critrio linear usado, um timo global pode ser obtido. As condies no
teorema 4.2, e corolrios 4.2, 4.3 e 4.4 so BMIs. Mediante esquemas de relaxao
tambm possvel otimizar-se critrios lineares. A relaxao obtida xando-se uma das
variveis de uma expresso bilinear e resolvendo-se a LMI resultante. A varivel livre
xada no valor encontrado, e a anteriormente pr-xada deixada livre em uma nova
iterao. Repete-se este processo at a satisfao de algum critrio de parada. Esquemas
assim descritos so empregados em (GOMES DA SILVA Jr. et al., 1997), (GOMES DA
SILVA Jr.; TARBOURIECH, 2001) e (PAIM, 2003), vide algoritmo 5.2, pgina 79.
O objetivo desta seo a sntese de compensadores baseados em dois critrios: a
maximizao da perturbao admissvel - Tolerncia Perturbao - e a minimizao
do ganho L
2
entre a perturbao e a sada regulada z - Rejeio Perturbao. Por
simplicidade, em ambos os casos considerar-se- (0) = 0, o que implica que o sistema
est em equilbrio no instante inicial.
4.5.1 Tolerncia Perturbao
A suposio (0) = 0 torna
1
=
1
. A idia ento minimizar , o que maximiza
o limite da perturbao. Se w = 0, adicionalmente, obtm-se a soluo para o problema
de maximizao da regio de atrao da origem em malha fechada. Note que, este pro-
blema s faz sentido quando a estabilidade em mbito global no est sendo considerada.
Para os teoremas e corolrios enunciados aqui, a mxima tolerncia perturbao obte-
nvel como segue
Para o teorema 4.1:
min
sujeito a (4.13a), (4.13b) e (4.13c)
(4.35)
Para o teorema 4.3:
min
sujeito a (4.32a) seguido de (4.32b), (4.24b) e (4.24c)
(4.36)
Para o teorema 4.2:
1. Encontrar K
1
tal que (A+B
1
K
1
C) C
.
2. Substitui-se o valor de K
1
obtido em 1 nas inequaes propostas.
3. Efetue-se
min
sujeito a (4.24a), (4.24b), (4.24c)
(4.37)
4. A matriz W substituda nas inequaes pelo valor obtido em 3. As demais vari-
veis so mantidas.
5. Efetue-se
min
sujeito a (4.24a), (4.24b), (4.24c)
(4.38)
6. A matriz K
1
substituda nas inequaes pelo valor obtido em 5. As demais vari-
veis so mantidas.
51
7. Retorna-se a 3 at que algum critrio de parada torne-se verdadeiro.
O algoritmo proposto tem como grande diculdade sua inicializao, uma vez que
envolve uma estimativa de parte do compensador que o algoritmo visa determinar. Um
modo possvel de inicializar-se K
1
atravs do resultado obtido com o teorema 4.3. A
vantagem desta escolha est na garantia de que K
1
atenda a todas as restries impostas
pelo teorema 4.2, uma vez que todas as solues que satisfazem as condies do teorema
4.3, satisfazem tambm as do teorema 4.2.
4.5.2 Rejeio Perturbao
A considerao (0) = 0 torna
o limite para o mximo do ganho L
2
de w para z.
Ao contrrio da tolerncia, a rejeio perturbao passvel de otimizao independente
do mbito da estabilidade da origem do sistema em malha fechada - local ou global.
Assumindo-se que
1
fornecido, o seguinte problema pode ser abordado em cada um
dos teoremas e corolrios.
Para o teorema 4.1:
min
sujeito a (4.13a), (4.13b) e (4.13c)
(4.39)
Para o corolrio 4.1:
min
sujeito a (4.23a)
(4.40)
Para o teorema 4.3:
min
sujeito a (4.32a) seguido de (4.32b), (4.24b) e (4.24c)
(4.41)
Para o corolrio 4.5:
min
sujeito a (4.32a) seguido de (4.34)
(4.42)
Para o teorema 4.2:
1. Seja K
1
denido a partir da condio sym{A+B
1
K
1
C} < 0.
2. Substitui-se o valor de K
1
obtido em 1 nas inequaes propostas.
3. Efetue-se
min
sujeito a (4.24a), (4.24b), (4.24c)
(4.43)
4. A matriz W substituda nas inequaes pelo valor obtido em 3. As demais vari-
veis so mantidas.
5. Efetue-se
min
sujeito a (4.24a), (4.24b), (4.24c)
(4.44)
6. A matriz K
1
substituda nas inequaes pelo valor obtido em 5. As demais vari-
veis so mantidas.
7. Retorna-se a 3 at que algum critrio de parada torne-se verdadeiro.
52
Aqui novamente, a inicializao concentra a grande diculdade em aplicar-se este algo-
ritmo. Mais uma vez, sugere-se obter K
1
a partir do problema formulado para o teorema
4.3.
Para o corolrio 4.2:
1. Seja K
1
denido a partir da condio sym{A+B
1
K
1
C} < 0.
2. Substitui-se o valor de K
1
obtido em 1 nas inequaes propostas.
3. Efetue-se
min
sujeito a (4.28)
(4.45)
4. A matriz W substituda nas inequaes pelo valor obtido em 3. As demais vari-
veis so mantidas.
5. Efetue-se
min
sujeito a (4.28)
(4.46)
6. A matriz K
1
substituda nas inequaes pelo valor obtido em 5. As demais vari-
veis so mantidas.
7. Retorna-se a 3 at que algum critrio de parada torne-se verdadeiro.
4.6 Exemplos Numricos
Esta seo exemplica alguns mtodos desenvolvidos neste captulo e os problemas
de otimizao da seo anterior. De forma ilustrativa o segundo exemplo numrico de
(GOMES DA SILVA Jr.; TARBOURIECH., 2005) utilizado. Nele, um controlador
linear sintetizado a priori para garantir a estabilidade da origem do sistema em malha
aberta, desconsiderando-se a saturao do atuador em amplitude. A partir deste exemplo,
um compensador anti-windup ser sintetizado para garantir a estabilidade da origem do
sistema em malha fechada, e resolver o problema da mxima tolerncia perturbao
para este exemplo.
Considere-se a seguinte planta:
_
_
x =
_
.1 .1
.1 3
_
x +
_
5 0
0 1
_
u +
_
.09501
.02311
_
w
y =
_
1 0
0 1
_
x
z =
_
1 0
0 1
_
x
(4.47a)
Neste modelo a matriz B
w
no consta no exemplo original referido, pois este no
considera perturbaes. As sadas medida y e controlada z so idnticas por simplicidade,
uma vez que o problema original em (GOMES DA SILVA Jr.; TARBOURIECH., 2005)
apresenta apenas uma nica sada.
Observe-se que os autovalores desta planta so
1
= .096771 e
2
= 2.996771. Para
que a origem deste sistema seja estvel e a sada apresente um desempenho satisfatrio,
53
foi projetado o seguinte controlador:
_
_
x
c
=
_
171.2 27.2
68 626.8
_
x
c
+
_
598.2 5.539
4.567 149.8
_
u
c
v
c
=
_
.146 .088
6.821 5.67
_
x
(4.47b)
A interligao entre (4.47a) e (4.47b) d-se mediante u = sat
u
0
(v
c
) e u
c
= y, e well-
posed pois o sistema estritamente prprio.
O controlador acima descrito no considera qualquer no-linearidade no atuador. A
planta aceita entradas restritas em aplitude pelo vetor u
0
=
_
5 2
T
.
Neste sistema aplicou-se os mtodos de sntese de anti-windup de ordem plena e re-
duzida. Simulaes feitas no ambiente Simulink do Matlab
3
exibem o comportamento
do sistema sob cada mtodo.
4.6.1 Simulao com o Compensador Anti-windup de Ordem Plena
Para o sistema (4.47a)-(4.47b), determinou-se um compensador anti-windup de ordem
plena. A planta foi sujeita uma perturbao de norma L
2
igual a 556.85, cuja manifes-
tao durou 5 segundos. A perturbao escolhida teve esta forma por representar eventos
externos a que os sistemas fsicos sujeitam-se, especialmente manutenes preventivas de
sistemas de misso crtica, onde os estados do sistema so levados a um novo equilbrio
durante a presena da perturbao.
O seguinte conjunto de matrizes foi obtido:
A
aw
= 1.0 10
4
_
_
0.0003 0.0660 0.1347 1.0284
0.0000 0.0183 0.0475 0.3974
0.0001 0.0100 0.0315 0.5512
0.0000 0.0040 0.0094 0.1124
_
_
B
aw
= 1.0 10
4
_
_
6.0711 0.0343
1.9185 0.0051
0.6575 0.0105
0.3661 0.0023
_
_
C
aw
=
_
0.0660 16.9658 21.7000 180.1890
0.0451 11.8255 20.6636 132.4550
_
D
aw
=
_
929.1781 2.1786
282.6055 2.0875
_
(4.47c)
As guras 4.2, 4.3, 4.4, 4.5, 4.6 ilustram respectivamente os grcos obtidos para a
sada controlada z, a entrada de controle u, a perturbao w, a compensao anti-windup
y
aw
e a sada do controlador y
c
. Observe-se a saturao de u
2
(t) na gura 4.3.
4.6.2 Sntese de Compensador Anti-windup de Ordem Reduzida
O mesmo foi feito para a compensao de ordem reduzida. Neste caso a ordem do
compensador foi a metade da do de ordem plena. A planta foi sujeita uma perturbao
de norma L
2
igual a 550.13, igualmente atuando entrada da planta por 5 segundos.
3
Simulink e Matlab so marcas registradas da Mathworks
54
0 1 2 3 4 5 6 7 8 9 10
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
z(t)
Tempo
z
Figura 4.2: Sinal z - Ordem Plena
0 1 2 3 4 5 6 7 8 9 10
2.5
2
1.5
1
0.5
0
0.5
1
1.5
2
u(t)
Tempo
u
Figura 4.3: Sinal u - Ordem Plena
55
0 1 2 3 4 5 6 7 8 9 10
0
20
40
60
80
100
120
w(t)
Tempo
w
Figura 4.4: Sinal w - Ordem Plena
0 1 2 3 4 5 6 7 8 9 10
100
50
0
50
100
150
200
y
aw
(t)
Tempo
y
a
w
Figura 4.5: Sinal y
aw
- Ordem Plena
O seguinte conjunto de matrizes foi obtido:
A
aw
= 1.0 10
3
_
4.0126 0
0 4.0126
_
B
aw
= 1.0 10
3
_
4.0126 0
0 4.0126
_
C
aw
=
_
0 0
0 0
_
D
aw
=
_
918.8485 3.0146
341.8372 1.8447
_
(4.47d)
As guras 4.7, 4.8, 4.9, 4.10, 4.11 ilustram respectivamente os grcos obtidos para a
sada controlada z, a entrada de controle u, a perturbao w, a compensao anti-windup
y
aw
e a sada do controlador y
c
. Observe-se a saturao de u
2
(t) na gura 4.8.
Finalmente, uma tabela mostra o compromisso entre os problemas de minimizar e
nos teoremas 4.1 e 4.3. A varivel nestes teoremas corresponde ao inverso do quadrado
da mxima norma L
2
de uma perturbao tolervel pelo sistema quando inicializado na
origem. A varivel , por sua vez, corresponde ao quadrado do limitante superior ao
ganho L
2
garantido pertubao sada controlada.
56
0 1 2 3 4 5 6 7 8 9 10
20
0
20
40
60
80
100
y
c
(t)
Tempo
y
c
Figura 4.6: Sinal y
c
- Ordem Plena
0 1 2 3 4 5 6 7 8 9 10
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
z(t)
Tempo
z
Figura 4.7: Sinal z - Ordem Reduzida
Na tabela 4.6 possvel observar o trade-off entre tolerncia e atenuao da pertur-
bao. medida que aumenta, ou seja, a tolerncia perturbao diminui, a atenuo
que o sistema aplica perturbao cresce.
57
0 1 2 3 4 5 6 7 8 9 10
2.5
2
1.5
1
0.5
0
0.5
1
1.5
2
u(t)
Tempo
u
Figura 4.8: Sinal u - Ordem Reduzida
Tabela 4.1: Trade-off Tolerncia Atenuao para a perturbao externa.
Ordem Plena Ordem Reduzida
3.22 10
6
3.83 10
1
3.30 10
6
2.01 10
4
3.25 10
6
2.04 10
1
3.30 10
6
3.86 10
2
3.29 10
6
9.96 10
0
3.47 10
6
3.72 10
0
3.32 10
6
6.46 10
0
3.51 10
6
3.04 10
0
3.39 10
6
3.64 10
0
3.90 10
6
8.75 10
1
4.30 10
6
3.79 10
1
5.20 10
6
1.77 10
1
6.45 10
6
7.18 10
2
1.04 10
5
5.00 10
2
1.29 10
5
4.95 10
2
4.16 10
5
4.95 10
2
58
0 1 2 3 4 5 6 7 8 9 10
0
20
40
60
80
100
120
w(t)
Tempo
w
Figura 4.9: Sinal w - Ordem Reduzida
0 1 2 3 4 5 6 7 8 9 10
300
250
200
150
100
50
0
y
aw
(t)
Tempo
y
a
w
Figura 4.10: Sinal y
aw
- Ordem Reduzida
0 1 2 3 4 5 6 7 8 9 10
20
0
20
40
60
80
100
y
c
(t)
Tempo
y
c
Figura 4.11: Sinal y
c
- Ordem Reduzida
59
5 SNTESE DE CONTROLADORES DINMICOS
5.1 Introduo
A losoa do anti-windup em sistemas lineares pressupe que planta e controlador
nominal - que despreza eventuais no-linearidades - sejam dados a priori, cabendo ao
compensador anti-windup o tratamento dos efeitos indesejveis manifestos pelas no-
linearidades intrnsecas planta. O captulo anterior seguiu esta idia propondo mtodos
para a sntese de compensadores dinmicos de ordem n+n
c
e inferiores a esta, onde o si-
nal de controle era limitado em amplitude com limites simtricos. Neste captulo resolve-
remos o problema de controle sujeito a restries segundo a abordagem da sntese direta.
Nesta abordagem, o controlador sintetizado simultaneamente a laos anti-windup. Adi-
cionalmente, considerar-se- o sistema sujeito a um atuador apresentando limitaes em
amplitude e taxa de variao. Os limites de taxa de variao tambm sero considerados
simtricos.
De modo a lidar com esta restrio adicional, ser proposto um controlador dinmico
no-linear, composto por um compensador linear clssico em cascata com um integrador
com entrada saturante. Dois laos estticos de anti-windup permitiro graus de liberdade
adicionais sintese.
5.2 Denio do Problema
A planta em estudo pode ser modelada a partir do equilbrio como mostrado em (4.1),
por convenincia abaixo repetido.
_
_
_
x = A x +B u +B
w
w
y = C
y
x +D
y
u +D
y,w
w
z = C
x
x +D
z
u +D
z,w
w
Tambm sujeita a perturbaes externas limitadas em norma L
2
, conforme (4.2). Supe-
se que a planta ter sua entrada de controle u limitada em amplitude e taxa de variao da
seguinte forma:
u
0
(i)
u
(i)
u
0
(i)
u
R
(i)
u
(i)
u
R
(i)
_
i = 1, , m (5.1)
onde u
0
representa a magnitude mxima do sinal de controle, e u
R
, de sua taxa de vari-
ao. Supe-se que apenas a sada y est disponvel para medio. O objetivo, ento,
dimensionar um controlador dinmico estabilizante.
De modo a lidar-se com as restries do sistema, considera-se o seguinte controlador
no-linear de ordem m+2m, composto por um controlador dinmico clssico em cascata
60
+
Ec
DINMICO
COMPENSADOR
Fc
+
PLANTA
INTEGRADOR
y
u v
y_c
Controlador Dinmico
Figura 5.1: Topologia de malha fechada proposta
commintegradores de entrada saturante, e dois laos anti-windup, conforme ilustrado em
5.1. Tal estrutura foi proposta em (GOMES DA SILVA Jr. et al., 2005), no contexto de
sistema de tempo discreto. A representao em espao de estados do controlador proposto
a seguinte.
_
_
x
c
= A
c
x
c
+B
c
_
y
v
_
+E
c
u
0
(v
) +F
c
u
R
(y
c
) +B
c,w
w
y
c
= C
c
x
c
+D
c
_
y
v
_
+D
c,w
w
v = sat
R
(y
c
) +B
v,w
w
v
c
= v +D
v,w
w
v
= v +D
,w
w
(5.2)
Tem-se x
c
n+m
, y
c
m
como seus respectivos vetores estado e sada. As matrizes
B
c,w
, D
c,w
so reais, constantes, de dimenses apropriadas e conhecidas a priori. A en-
trada do controlador representada por um vetor composto pela sada medida y e um sinal
realimentado v
, discutido a seguir. A sada y
c
corresponde taxa de variao calculada
para o sinal de controle, livre de saturao.
O controlador no age sobre a planta, seno atravs de um atuador. Os limites deste
so determinados por suas propriedades fsicas e natureza do processo. Enquanto os si-
nais de controle so tipicamente eletro-eletrnicos, o atuador apresenta em sua sada -
eventualmente - sinais de natureza distinta, de difcil medio. O efeito da saturao da
taxa de variao e amplitude realimentado no compensador dinmico atravs dos sinais
u
R
(y
c
) e
u
0
(v
), respectivamente. Isto feito atravs de matrizes de ganho esttico F
c
e
E
c
, conforme mostra a gura 5.1. Como denido em (2.3c), a compensao anti-windup
exige o conhecimento da taxa de variao e amplitude do sinal de controle aplicado
planta (ou seja, sada do controlador). Se as saturaes em taxa de variao e amplitude
do atuador estiverem modeladas no prprio controlador, o sinal de controle de facto pode
ser estimado quando invivel for medi-lo. A estrutura do controlador proposto, inclui em
seu modelo a a representao dos limites do atuador considerados, amplitude e taxa de
variao. Esta representao, atravs das duas saturaes simtricas que o modelo do con-
trolador dinmico contempla, permite determinar se os limites fsicos do atuador foram
excedidos, ou no.
A sada do controlador v
c
pode eventualmente apresentar a ao de alguma perturba-
o externa, uma vez que w pode, sem prejuzo das equaes, ser uma matriz q l, sendo
cada coluna uma perturbao independente. A reproduo de v
c
implica no conhecimento
61
de parmetros desta perturbao. A reproduo de v dispensa tal necessidade. As esti-
mativas de v podero da mesma forma estarem sujeitas ao efeito de alguma perturbao,
incerteza ou erros de medida assim modelados. Prevendo-se esta situao, existe v
, que
considera uma matriz D
,w
para acoplar a perturbao e representar seus efeitos.
No caso em que v
c
pode ser medido e as incertezas e perturbaes manifestas no
interior do controlador so desprezveis, faz-se v
c
= v
mediante D
v,w
= D
,w
. Se v
c
no for mensurvel e da mesma forma o controlador no estiver sujeito a perturbaes
ou incertezas relevantes tem-se D
,w
= 0, o que torna v
= v. Se a perturbao for
desprezvel, as matrizes de acoplamento de w podem ser desconsideradas, e tem-se v
c
=
v
= v, o que consitui-se o caso ideal. O modelo proposto possibilita que os resultados
obtidos sejam vlidos para todas estas possibilidades.
A partir de y
c
e v
, determina-se as respectivas funes
u
R
(y
c
) e
u
0
(v
). Estas me-
diante os respectivos ganhos F
c
e E
c
, realimentamo compensador dinmico, completando
a malha de controle da sada da planta.
Finalmente, a estrutura do controlador garante que a restrio de taxa de variao do
atuador no violada. Pelo lema 2.6 a saturao com os limites da taxa de variao do
atuador aplicada a y
c
garante que v
c
tenha uma taxa de variao que no exceda estes
limites.
As matrizes A
c
, B
c
, C
c
, D
c
, E
c
, F
c
so reais, constantes e de dimenses apropriadas.
Mtodos para sua sntese sero propostos e desenvolvidos neste captulo.
5.3 O Sistema em Malha Fechada
Desenvolvendo-se os termos das equaes da seo anterior, temos que:
x = Ax +Bsat
u
0
(v
c
) Bv
c
+Bv
c
+B
w
w
= Ax B
u
0
(v
c
) +Bv
c
+B
w
w
= Ax B
u
0
(v
c
) +B(v +D
v,w
w) B
w
w
= Ax +Bv B
u
0
(v
c
) + (B
w
+BD
v,w
) w
y = C
y
x +D
y
sat
u
0
(v
c
) +D
y,w
w
= C
y
x +D
y
sat
u
0
(v
c
) D
y
v
c
+D
y
v
c
+D
y,w
w
= C
y
x D
y
u
0
(v
c
) +D
y
(v +D
v,w
w) +D
y,w
w
= C
y
x +D
y
v D
y
u
0
(v
c
) + (D
y,w
+D
y
D
v,w
) w
x
c
= A
c
x
c
+B
c
_
C
y
x +D
y
v D
y
u
0
(v
c
) + (D
y,w
+D
y
D
v,w
) w
v +D
,w
w
_
+E
c
u
0
(v
) +F
c
u
R
(y
c
) +B
c,w
w
= B
c
__
C
y
D
y
0 I
m
_ _
x
v
_
_
D
y
0
_
u
0
(v
c
) +
_
D
y,w
+D
y
D
v,w
D
,w
_
w
_
+A
c
x
c
+E
c
u
0
(v
) +F
c
u
R
(y
c
) +B
c,w
w
y
c
= D
c
_
C
y
x +D
y
v D
y
u
0
(v
c
) + (D
y,w
+D
y
D
v,w
) w
v +D
,w
w
_
+C
c
x
c
+D
c,w
w
= D
c
__
C
y
D
y
0 I
m
_ _
x
v
_
_
D
y
0
_
u
0
(v
c
) +
_
D
y,w
+D
y
D
v,w
D
,w
_
w
_
+C
c
x
c
+D
c,w
w
62
v = sat
u
R
(y
c
) +B
v,w
w
= sat
u
R
(y
c
) y
c
+y
c
+B
v,w
w
= D
c
__
C
y
D
y
0 I
m
_ _
x
v
_
_
D
y
0
_
u
0
(v
c
) +
_
D
y,w
+D
y
D
v,w
D
,w
_
w
_
+C
c
x
c
+D
c,w
w
u
R
(y
c
) +B
v,w
w
Considerando-se as matrizes abaixo relacionadas,
A =
_
A B
0 0
_
B =
_
0
I
m
_
C
y
=
_
C
y
D
y
0 I
m
_
D
y
=
_
D
y
0
_
C
z
=
_
C
z
D
z
B
1
=
_
B
0
_
C
z
=
_
C
z
0
B
2
=
_
0
E
c
_
(5.3a)
A =
_
A+BD
c
C BC
c
B
c
C A
c
_
B
1
=
_
B
1
+BD
c
D
y
B
c
D
y
_
B
R
=
_
B
F
c
_
D
y,w
=
_
D
y,w
+D
y
D
v,w
D
,w
_
B
w
=
_
B
w
+BD
v,w
B
v,w
+D
c,w
_
B
w
=
_
B
w
B
c,w
_
B
c,w
= (B
c,w
+B
c
D
y,w
) K =
_
D
c
C
y
C
c
K =
_
K 0
D
z,w
= (D
z,w
+D
z
D
v,w
) L =
_
0 I
m
L =
_
L 0
D
c,w
= (D
c,w
+D
c
D
y,w
) D
v,w
= D
v,w
= D
v,w
D
y
= D
y
D
,w
= D
,w
= D
,w
D
z
= D
z
= D
z
D
z,w
= D
z,w
D
c,w
= D
c,w
, D
z,w
= D
z,w
e o seguinte vetor de estados:
=
_
x
T
v
T
x
T
c
T
(5.3b)
Verica-se, ento, a possibilidade de representar-se o sistema em malha fechada pelas
seguintes equaes:
= A B
1
u
0
(v
c
) +B
2
u
0
(v
) +B
R
u
R
(y
c
) +B
w
w
z = C
z
D
z
u
0
(v
c
) +D
z,w
w
(5.3c)
5.4 Resultados Principais
Esta seo apresenta em forma de teoremas e corolrios, seguidos de suas respectivas
provas, os mtodos para a obteno das matrizes A
c
, B
c
, C
c
, D
c
, E
c
e F
c
, necessrias na
denio do controlador dinmico proposto.
Teorema 5.1. Se existem matrizes simtricas positivas denidas X
(n+m)(n+m)
, Y
(n+m)(n+m)
, matrizes diagonais positivas S
1
mm
, S
2
mm
, S
R
mm
,
matrizes
A
(n+m)(n+m)
,
B
(n+m)(p+m)
,
C
m(n+m)
,
D
m(p+m)
, F
1
m(n+m)
, F
2
m(n+m)
, F
R
m(n+m)
, G
11
m(n+m)
, G
21
m(n+m)
, G
R1
m(n+m)
, N
(n+m)(n+m)
, Q
1
m(n+m)
, Q
2
m(n+m)
, e escalares reais posi-
63
tivos , , vericando as inequaes matriciais abaixo relacionadas,
_
B1
A
B4
B2
B5
2S
1
F
2
Q
1
0 2S
2
F
R
S
R
B
T
Q
2
DD
y
S
1
0 2S
R
B3
B6
D
T
v,w
D
T
,w
B7
I
q
C
z
X C
z
D
z
S
1
0 0 D
z,w
I
r
_
_
< 0
B1
= sym{AX +B
C}
B5
= G
11
S
1
B
T
1
Y S
1
D
T
y
B
T
B2
= F
1
S
1
B
T
1
S
1
D
T
y
D
T
B
T
B6
= B
T
Y +B
T
c,w
N
T
+D
T
y,w
B
T
B3
= B
T
w
+D
T
y,w
D
T
B
T
B7
= D
T
c,w
+D
T
y,w
D
T
B4
= sym{Y A+
BC
y
}
(5.4a)
_
_
X
I
n+m
Y
L
(i)
X F
1
(i)
L
(i)
G
11
(i)
u
2
0
(i)
_
_
> 0
_
_
X
I
n+m
Y
L
(i)
X F
2
(i)
L
(i)
G
21
(i)
u
2
0
(i)
_
_
> 0
_
_
X
I
n+m
Y
C
(i)
F
R
(i)
D
(i)
C
y
G
R1
(i)
u
2
R
(i)
_
_
> 0
_
_
, i = 1, , m (5.4b)
> 0 (5.4c)
sym{N} > 0 (5.4d)
ento o controlador (4.4), com
F
T
c
= S
1
R
_
Q
2
G
R1
+S
R
B
T
Y
_
N
T
E
T
c
= S
1
2
(Q
1
G
21
) N
T
D
c
=
D
C
c
=
_
C
DC
y
X
_
M
T
, M
T
= N
1
(I
n+m
Y X)
B
c
= N
1
_
B Y B
D
_
A
c
= N
1
_
AY AX Y B
C NB
c
C
y
X A
T
C
T
y
D
T
B
T
_
M
T
(5.4e)
garante que o sistema em malha fechada well-posed e:
1. As trajetrias so limitadas, permanecendo no elipside (P,
1
) para todo (0)
(P, ), com =
1
1
, w
2
2
1
;
2. z
2
2
w
2
2
+V (0), V (x) = x
T
Px;
3. quando w = 0, a origem do sistema em malha fechada localmente assintotica-
mente estvel para todo (0) (P,
1
).
onde P determinado por (5.5) e M denida segundo:
M = (I
n+m
Y X)
T
N
T
(5.4f)
64
A prova deste teorema segue uma seqncia de passos similar a empregada na prova
do teorema 4.1.
Prova. As matrizes abaixo so redenidas para adequarem-se congurao distinta
deste sistema. Sejam, pois:
P =
_
Y
N
T
_
, P
1
=
_
X
M
T
_
, =
_
X I
n+m
M
T
0
_
(5.5)
Este sistema apresenta trs no-linearidades:
u
0
(v
c
),
u
0
(v
) e
u
R
(y
c
). Aplicando-se o
lema 2.1, seguindo a justicativa em torno da equao (4.16b), as seguintes condies de
setor podem ser estabelecidas para estas no-linearidades, respectivamente.
u
0
(v
c
)
T
T
1
_
u
0
(v
c
)
_
G
1
D
v,w
_
w
__
0 (5.6a)
u
0
(v
)
T
T
2
_
u
0
(v
)
_
G
2
D
,w
_
w
__
0 (5.6b)
u
R
(y
c
)
T
T
R
_
_
u
R
(y
c
)
_
G
R
D
c
D
y
D
c,w
_
_
u
0
(v
c
)
w
_
_
_
_
0 (5.6c)
Como visto no captulo anterior, a validade das mesmas requer simultaneamente per-
tencente aos seguintes conjuntos:
S
1
(u
0
)
=
_
2(n+m)
|
L
(i)
G
1
(i)
u
0
(i)
, i = 1, , m
_
S
2
(u
0
)
=
_
2(n+m)
|
L
(i)
G
2
(i)
u
0
(i)
, i = 1, , m
_
S (u
R
)
=
_
2(n+m)
|
K
(i)
G
R
(i)
u
R
(i)
, i = 1, , m
_
(5.7)
Isto garantido se algum conjunto elipsoidal (P,
1
) que envolva as trajetrias de
para todo t > 0 estiver contido em cada um dos conjuntos de (5.7). Aplicando-se o lema
2.5 esta restrio, obtm-se as LMIs,
_
P
L
(i)
G
1
(i)
u
2
0
(i)
_
> 0
_
P
L
(i)
G
2
(i)
u
2
0
(i)
_
> 0
_
P
K
(i)
G
R
(i)
u
2
R
(i)
_
> 0
_
_
, i = 1, , m
Multiplicando cada uma delas por BLKDG
_
T
1
e seu transposto, respectivamente
pela esquerda e direita, chega-se as LMIs (5.4b).
Considerando-se o desenvolvimento da prova do teorema 4.1 (em especial a denio
65
de
L) e as condies de setor descritas em (5.6); a condio
L < 0 aqui garantida se:
L
L 2
_
_
u
0
(v
c
)
u
0
(v
u
R
(y
c
)
_
_
T
_
_
T
1
0 0
0 T
2
0
0 0 T
R
_
_
_
_
u
0
(v
c
) +
C1
u
0
(v
) +
C2
u
R
(y
c
) +
C3
_
_
< 0, onde:
C1
=
_
G
1
D
v,w
_
w
_
C2
=
_
G
2
D
,w
_
w
_
C3
=
_
G
R
D
c
D
y
D
c,w
_
_
u
0
(v
c
)
w
_
_
(5.8a)
Como agora possvel representar-se:
V =
_
_
sym{A
T
P}
B
T
1
P 0
B
T
2
P 0 0
B
T
R
P 0 0 0
B
T
w
P 0 0 0 I
q
_
_
A condio abaixo expressa,
5
=
_
_
sym{A
T
P}
B
T
1
P 0
B
T
2
P 0 0
B
T
R
P 0 0 0
B
T
w
P 0 0 0 I
q
_
_
+
1
_
_
C
T
z
D
T
z
0
0
D
T
z,w
_
_
_
C
z
D
z
0 0 D
z,w
+
_
_
0
T
1
G
1
2T
1
T
2
G
2
0 2T
2
T
R
G
R
T
R
D
c
D
y
0 2T
R
0 D
T
v,w
T
1
D
T
,w
T
2
D
T
c,w
T
R
I
q
_
_
< 0
(5.8b)
garante
L < 0. Aplicando-se o complemento de Schur a (5.8b), tem-se:
_
_
sym{A
T
P}
B
T
1
P +T
1
G
1
2T
1
B
T
2
P +T
2
G
2
0 2T
2
B
T
R
P +T
R
G
R
T
R
D
c
D
y
0 2T
R
B
T
w
P D
T
v,w
T
1
D
T
,w
T
2
D
T
c,w
T
R
I
q
C
z
D
z
0 0 D
z,w
I
r
_
_
< 0 (5.8c)
Seja S
1
, S
2
, S
R
, tais que:
_
_
S
1
0 S
2
0 0 S
R
_
_
_
_
T
1
0 T
2
0 0 T
R
_
_
= I
3m
Multiplicando-se (5.8c) pela esquerda e direita por:
BLKDG
__
T
S
1
S
2
S
R
I
q+m
_
, (5.8d)
66
e seu transposto, respectivamente, chega-se seguinte expresso:
_
_
sym{
T
A
T
P}
S
1
B
T
1
P +G
1
2S
1
S
2
B
T
2
P +G
2
0 2S
2
S
R
B
T
R
P +G
R
D
c
D
y
S
1
0 2S
R
B
T
w
P D
T
v,w
D
T
,w
D
T
c,w
I
q
C
z
D
z
S
1
0 0 D
z,w
I
r
_
_
< 0 (5.8e)
Considerando-se a estrutura das matrizes denidas em (5.5) e a mudana de variveis
proposta em (SCHERER; GAHINET; CHILALI, 1997) tem-se,
sym{
T
A
T
P} =
_
sym{AX +B
C}
A sym{Y A+
BC
y
}
_
A = Y AX +Y BD
c
CX +Y BC
c
M
T
+NB
c
CX +NA
c
M
T
B = Y BD
c
+NB
c
C = D
c
C
y
X +C
c
M
T
S
1
B
T
1
P =
_
S
1
B
T
1
+S
1
D
T
y
D
T
c
B
T
S
1
B
1
Y +S
1
D
T
y
B
T
S
2
B
T
2
P =
_
0 S
2
E
T
c
N
T
S
R
B
T
R
P =
_
S
R
B
T
S
R
B
T
Y +S
R
F
T
c
N
T
B
T
w
P =
_
B
T
w
+D
T
y,w
D
T
B
T
B
T
Y +B
T
c,w
N
T
+D
T
y,w
B
T
C
z
=
_
C
z
X C
z
G
i
=
_
G
i1
X +G
i2
M
T
G
i1
, i = 1, 2, R
Sendo:
F
i
= G
i1
X +G
i2
M
T
, i = 1, 2, R
Q
1
= G
21
+S
2
E
T
c
N
T
Q
2
= G
R1
S
R
B
T
Y +S
R
F
T
c
N
T
(5.8f)
chega-se inequao matricial (5.4a). A denio de matrizes (5.4e), completa o modelo
do controlador (5.2) uma vez que as matrizes de acoplamento da perturbao so conhe-
cidas a priori. A estrutura das matrizes , P e P
1
exige NM
T
= I
n+m
XY , relao
esta que pode ser vericada a partir do produto PP
1
. O que no ocorrer caso a matriz
N resulte singular. A LMI (5.4d) garante N no singular.
1
Se no singular, uma vez que (5.4a) vericada, tambm o (5.8b) para as
matrizes denidas em (5.4e).
A LMI (5.4c) garante que
=
1
1
ser positivo. Assim, se (5.4a) satisfeita,
L < 0, para todo (0) (P, ).
A no singularidade de N no teorema 4.1 evitada pela prpria contruo das ma-
trizes. Aqui, como uma varivel de deciso deve ter garantias explcitas de sua no
singularidade.
O sistema em estudo apresenta trs no-linearidades tipo zona-morta. A matriz D
y
causa a transmisso direta de sat
u
0
(v
c
) para a sada medida da planta. O compensador di-
nmico transmite atravs de D
c
, y diretamente para y
c
. Este processo causa a dependncia
1
No entanto, no sem a desnecessria conservatividade que se constitui na exigncia dos autovalores
de N contidos no SPD. A eventual no vericao das LMIs por algum solver pode no ser contornada
substituindo-se (5.4d) por LMI que expresse o oposto. A soluo menos restritiva que garanta N no singu-
lar, dentro desta estrutura de representao do problema seria uma LMI que garantisse que os autovalores
esto todos fora de uma regio, to pequena quanto se queira, contendo a origem.
67
de
u
R
(y
c
) de
u
0
(v
c
). Esta dependncia resulta nos blocos (4, 2) de (5.8c) e (5.8e), (5, 3)
de (5.4a), e o termo bilinear de
B2
, tambm em (5.4a). Nota-se que se D
y
= 0 ou o pro-
duto D
c
D
y
= 0 e v
c
= v
, a BMI (5.4a) pode ser reduzida a uma LMI. Este caso ser
estudado na seo 5.5.
O corolrio 5.1 o primeiro passo obteno de condies expressas por LMIs para
o problema em estudo neste captulo.
Corolrio 5.1. Se existem matrizes simtricas positivas denidas X
(n+m)(n+m)
, Y
(n+m)(n+m)
, matrizes diagonais positivas S
1
mm
, S
2
mm
, S
R
mm
,
matrizes
A
(n+m)(n+m)
,
B
(n+m)(p+m)
,
C
m(n+m)
,
D
m(p+m)
, F
1
m(n+m)
, F
2
m(n+m)
, F
R
m(n+m)
, G
11
m(n+m)
, G
21
m(n+m)
, G
R1
m(n+m)
, N
(n+m)(n+m)
, Q
1
m(n+m)
, Q
2
m(n+m)
, J
1
j
1
, J
2
j
2
,
onde j
1
= (2 (n +m) + 3m+q +r) 3m e j
2
= 3m3m, e escalares reais positivos
, , vericando a inequao matricial abaixo disposta,
_
M
1
+ sym{J
1
R}
M
T
2
+J
2
R J
T
1
sym{J
2
}
_
< 0 (5.9)
bem como (5.4b), (5.4c), (5.4d) e (5.4f); sendo:
M
1
=
_
B1
A
B4
F
1
G
11
0
F
2
Q
1
0 2S
2
F
R
S
R
B
T
Q
2
0 0 2S
R
B3
B6
D
T
v,w
D
T
,w
B7
I
q
C
z
X C
z
0 0 0 D
z,w
I
r
_
_
M
T
2
=
1
2
_
_
0 0 S
1
0 0 0 0
0 0 0 0 D
T
y
D
T
0 D
T
z
0 0 0 0 0 D
v,w
0
_
_
R =
_
_
B
T
1
D
T
y
D
T
B
T
B
1
Y D
T
Y
B
T
I
m
0 0 0 0
0 0 S
1
0 0 0 0
0 0 I
m
0 0 0 0
_
_
(5.10)
ento o controlador (5.2), denido em (5.4e) garante o disposto nos itens 1, 2 e 3 do
teorema 5.1.
Prova. A inequao matricial (5.4a) pode ser reescrita como:
_
B1
A
B4
F
1
G
11
0
F
2
Q
1
0 2S
2
F
R
S
R
B
T
Q
2
0 0 2S
R
B3
B6
D
T
v,w
D
T
,w
B7
I
q
C
z
X C
z
0 0 0 D
z,w
I
r
_
_
+
_
_
0
0 0
B2
F
1
S
1
B
T
1
Y S
1
D
T
y
B
T
2S
1
0 0 0 0
0 0
DD
y
S
1
0 0
0 0 D
T
v,w
0 0 0
0 0 D
z
S
1
0 0 0 0
_
_
< 0
(5.11a)
68
A segunda parcela da inequao acima pode ser reescrita como sym{M
2
R}; M
2
e
R con-
forme denio em (5.10). Seguindo o desenvolvimento de (TARBOURIECH; GOMES
DA SILVA Jr.; BENDER, 2006),
M
1
+ sym{M
2
R} < 0
_
I
A
R
T
_
M
1
M
T
2
0
_ _
I
A
R
_
< 0 (5.11b)
onde I
A
de ordem 2(n+m)+3m+q+r. Ento, pelo Lema de Finsler, existemmatrizes
J
1
e J
2
dedimenses apropriadas tais que:
_
M
1
M
T
2
0
_
+ sym
__
J
1
J
2
_
_
R I
B
_
< 0 (5.11c)
onde I
B
de ordem 3m; algo equivalente a (5.9). As demais disposies vericam-se
pela prova do Teorema 5.1.
Com os multiplicadores J
1
e J
2
propostos neste ltimo corolrio, apresenta-se agora
uma estrutura especial para os mesmos de forma a representar (5.9) em uma LMI.
Teorema 5.2. Se existem matrizes simtricas positivas denidas X
(n+m)(n+m)
, Y
(n+m)(n+m)
, matrizes diagonais positivas S
1
mm
, S
2
mm
, S
R
mm
,
matrizes
A
(n+m)(n+m)
,
B
(n+m)(p+m)
,
C
m(n+m)
,
D
m(p+m)
, F
1
m(n+m)
, F
2
m(n+m)
, F
R
m(n+m)
, G
11
m(n+m)
, G
21
m(n+m)
, G
R1
m(n+m)
, N
(n+m)(n+m)
, Q
1
m(n+m)
, Q
2
m(n+m)
, Q
3
m(n+m)
, J
112
(n+m)m
, J
132
mm
, J
113
(n+m)m
, J
123
(n+m)m
, J
133
mm
, J
143
mm
, J
153
mm
, J
163
qm
, J
173
rm
, J
221
mm
, J
231
mm
, J
223
mm
, J
233
mm
, e escalares reais positivos , , vericando a LMI,
_
D1
D2
D3
_
< 0
D1
=
_
_
sym{AX +B
C}
A sym{Y A+
BC
y
}
F
1
+J
T
113
G
11
+J
T
123
sym{J
133
}
F
2
Q
1
J
143
2S
2
F
R
S
R
B
T
Q
2
J
153
0 2S
R
_
D2
=
_
B3
B6
D
T
v,w
+J
163
D
T
,w
B7
C
z
X C
z
J
173
0 0
B
T
1
D
T
y
DB
T
B
T
1
Y D
y
B
T 1
2
S
1
I
m
0 0
J
T
112
Q
3
S
1
J
T
132
+J
223
0
1
2
D
T
y
D
T
J
T
113
J
T
123
d1
J
T
143
J
T
153
_
d1
= J
233
J
T
133
J
231
D3
=
_
_
I
q
D
z,w
I
r
0 0 2I
m
0
1
2
D
T
z
J
221
2I
m
1
2
D
v,w
J
163
J
T
173
J
231
J
T
223
sym{J
233
}
_
_
(5.12)
e as LMIs (5.4b), (5.4c), (5.4d) e (5.4f); o controlador (5.2) determinado em (5.4e) ga-
rante o disposto nos itens 1, 2 e 3 do Teorema 5.1.
69
Prova. Da inequao (5.9), o desenvolvimento da expresso resulta em:
6
=
_
F1
F2
F3
_
< 0
F1
=
_
f1
f2
f6
f3
f7
f8
f4
Q
1
J
141
B
T
1
Y J
141
D
T
y
B
T
f9
2S
2
f5
Q
2
J
151
B
T
1
Y J
151
D
T
y
B
T
f10
0 2S
R
_
f1
=
B1
sym
_
J
111
B
T
1
+J
111
D
T
y
D
T
B
T
_
f2
=
AJ
121
B
T
1
J
121
D
T
y
D
T
B
T
Y B
1
J
T
111
BD
y
J
T
111
f3
= F
1
J
131
B
T
1
J
131
D
T
y
D
T
B
T
J
T
111
+S
1
J
T
112
+J
T
113
f4
= F
2
J
141
B
T
1
J
141
D
T
y
D
T
B
T
f5
= F
R
S
R
B
T
J
151
B
T
1
J
151
D
T
y
D
T
B
T
f6
=
B3
sym
_
J
121
B
T
1
Y +J
121
D
T
y
B
T
_
f7
= G
11
J
131
B
T
1
Y J
131
D
T
y
B
T
J
T
121
+S
1
J
T
122
+J
T
123
f8
= sym{J
131
+J
132
S
1
+J
133
}
f9
= J
141
+J
142
S
1
+J
143
f10
= J
151
+J
152
S
1
J
153
F2
=
_
f11
f16
D
T
v,w
J
161
+J
162
S
1
+J
163
D
T
,w
B7
f12
f17
J
171
+ J
172
S
1
+J
173
0 0
f13
f18
1
2
S
1
J
211
+J
212
S
1
+J
213
J
T
131
J
T
141
J
T
151
f14
f19
J
221
+J
222
S
1
+J
223
J
T
132
J
T
142
f21
f15
f20
d1
+J
232
S
1
J
T
143
J
T
153
_
f11
= B
T
w
J
161
B
T
1
J
161
D
T
y
D
T
B
T
f12
= C
z
X J
171
B
T
1
J
171
D
T
y
D
T
B
T
f13
= J
211
B
T
1
J
211
D
T
y
D
T
B
T
J
T
111
f14
= J
221
B
T
1
J
221
D
T
y
D
T
B
T
J
T
112
f15
= J
231
B
T
1
J
231
D
T
y
D
T
B
T
J
T
113
f16
=
B6
J
161
B
T
1
Y J
161
D
T
y
B
T
f17
= C
z
J
171
B
T
1
Y J
171
D
T
y
B
T
f18
= J
211
B
T
1
Y J
211
D
T
y
B
T
J
T
121
f19
= J
221
B
T
1
Y J
221
D
T
y
B
T
J
T
122
f20
= J
231
B
T
1
Y J
231
D
T
y
B
T
J
T
123
f21
=
1
2
D
T
y
D
T
J
T
152
F3
=
_
_
I
q
D
z,w
I
r
J
T
161
J
T
171
sym{J
211
}
J
T
162
1
2
D
T
z
J
T
172
J
221
J
T
212
sym{J
222
}
f22
J
T
173
J
231
J
T
213
J
232
J
T
223
f23
_
f22
=
1
2
D
v,w
J
163
f23
= sym{J
233
}
(5.13a)
70
Considerando-se a seguinte estrutura das matrizes J
1
e J
2
:
J
1
=
_
_
0 J
112
J
113
0 J
122
J
123
0 J
132
J
133
0 0 J
143
0 0 J
153
0 0 J
163
0 0 J
173
_
_
, J
2
=
_
_
I
m
0 0
J
221
I
m
J
223
J
231
0 J
233
_
_
(5.13b)
possvel vericar-se que (5.13a) torna-se idntica a (5.12). Os demais termos do coro-
lrio seguem a prova apresentada para o Teorema 5.1.
Observe-se que em nenhum momento garantiu-se a well-posedness do sistema em
malha fechada. Esta uma garantia algebricamente mais rdua de ser obtida, uma vez que
envolve a um produto com D
c
e S
R
, portanto constitui-se em uma condio bilinear. No
obstante, a well-posedness da interconexo deste sistema pode ser vericada a posteriori,
atravs da seguinte condio:
2S D
c
D
y
S
R
S
R
D
T
y
D
T
c
< 0 (5.14)
Outras formas de garantir-se a well-posedness do sistema em malha fechada devem ser
investigadas e constituem-se em perspectivas deste trabalho.
5.5 Casos Especiais
Embora tenha sido trabalhado uma situao com generalidade intencional, possvel
prever-se aplicaes especcas cuja representao seja algebricamente mais simples.
5.5.1 Matriz de transferncia da planta estritamente prpria, atuador mensurvel:
D
y
= 0 e v
c
= v
Caso a planta tenha uma matriz de transferncia estritamente prpria, e no exista
diferena signicativa (a ponto de ser expressa no modelo) entre v
c
e v
, a formulao
das condies sucientes para o disposto nos tens 1, 2 e 3 do teorema 5.1 pode ser
simplicada. As condies tornam-se LMIs, e o sistema naturalmente well-posed. A
ordem do sistema diminui, pois no existe nesta representao a no-linearidade
u
0
(v
).
As matrizes utilizadas para representar o sistema em malha fechada modicam-se. Os
resultados sero enunciados em colorrio e o respectivo desenvolvimento ser includo na
prova.
Corolrio 5.2. Se existem matrizes simtricas positivas denidas X
(n+m)(n+m)
, Y
(n+m)(n+m)
, matrizes diagonais positivas S
1
mm
, S
R
mm
, matrizes
A
(n+m)(n+m)
,
B
(n+m)(p+m)
,
C
m(n+m)
,
D
m(p+m)
, F
1
m(n+m)
, F
R
m(n+m)
, G
11
m(n+m)
, G
R1
m(n+m)
, N
(n+m)(n+m)
, Q
1
m(n+m)
,
71
Q
2
m(n+m)
, e escalares reais positivos , , vericando as LMIs abaixo,
_
B1
A
B4
B2
B5
2S
1
F
R
S
R
B
T
Q
1
0 2S
R
B3
B6
D
T
v,w
B7
I
q
C
z
X C
z
D
z
S
1
0 D
z,w
I
r
_
_
< 0
B5
= G
11
S
1
B
T
1
Y S
1
D
T
y
B
T
+S
1
E
T
c
N
T
B2
= F
1
S
1
B
T
1
(5.15a)
_
_
X
I
n+m
Y
L
(i)
X F
1
(i)
L
(i)
G
11
(i)
u
2
0
(i)
_
_
> 0
_
_
X
I
n+m
Y
C
(i)
F
R
(i)
D
(i)
C
y
G
R1
(i)
u
2
R
(i)
_
_
> 0
_
_
, i = 1, , m (5.15b)
> 0 (5.15c)
sym{N} > 0 (5.15d)
ento o controlador (4.4), denido conforme (5.4e) garante o disposto nos itens 1, 2 e 3
do teorema 5.1.
Prova. Partindo-se das equaes originais, aplica-se as idealizaes aqui propostas. As
equaes so desenvolvidas de modo a obter-se a representao em malha fechada, con-
forme seqncia das demonstraes anteriores.
x = Ax +Bsat
u
0
(v
c
) Bv
c
+Bv
c
+B
w
w
= Ax B
u
0
(v
c
) +Bv
c
+B
w
w
= Ax B
u
0
(v
c
) +B(v +D
v,w
w) B
w
w
= Ax +Bv B
u
0
(v
c
) + (B
w
+BD
v,w
) w
y = C
y
x +D
y,w
w
x
c
= A
c
x
c
+B
c
_
C
y
x +D
y,w
w
v +D
v,w
w
_
+E
c
u
0
(v
c
) +F
c
u
R
(y
c
) +B
c,w
w
= A
c
x
c
+B
c
__
C
y
0
0 I
m
_ _
x
v
_
+
_
D
y,w
D
v,w
_
w
_
+E
c
u
0
(v
c
) +F
c
u
R
(y
c
) +B
c,w
w
y
c
= C
c
x
c
+D
c
_
C
y
x +D
y,w
w
v +D
v,w
w
_
+D
c,w
w
= C
c
x
c
+D
c
__
C
y
0
0 I
m
_ _
x
v
_
+
_
D
y,w
D
v,w
_
w
_
+D
c,w
w
v = sat
u
R
(y
c
) +B
v,w
w
= sat
u
R
(y
c
) y
c
+y
c
+B
v,w
w
= C
c
x
c
+D
c
__
C
y
0
0 I
m
_ _
x
v
_
+
_
D
y,w
D
v,w
_
w
_
+D
c,w
w
u
R
(y
c
) +B
v,w
w
72
As matrizes neste caso diferem um pouco das utilizadas no captulo anterior.
A =
_
A B
0 0
_
B =
_
0
I
m
_
C
y
=
_
C
y
0
0 I
m
_
B
1
=
_
B
1
E
c
_
C
z
=
_
C
z
D
z
B
1
=
_
B
0
_
C
z
=
_
C
z
0
B
R
=
_
B
F
c
_
K =
_
K 0
D
c,w
= D
c,w
L =
_
L 0
D
z,w
= D
z,w
A =
_
A+BD
c
C BC
c
B
c
C A
c
_
B
w
=
_
B
w
+BD
v,w
B
v,w
+D
c,w
_
B
w
=
_
B
w
B
c,w
_
B
c,w
= (B
c,w
+B
c
D
y,w
)
D
z,w
= (D
z,w
+D
z
D
v,w
)
D
c,w
= (D
c,w
+D
c
D
y,w
)
K =
_
D
c
C
y
C
c
L =
_
0 I
m
D
z
= D
z
= D
z
D
y,w
=
_
D
y,w
D
v,w
_
O sistema em malha fechada agora representado por:
= A +B
1
u
0
(v
c
) +B
R
u
R
(y
c
) +B
w
w
z = C
z
D
z
u
0
(v
c
) +D
z,w
w
A condio
L < 0 garantida por:
_
_
sym{A
T
P}
B
T
1
P 0
B
T
R
P 0 0
B
T
w
P 0 0 I
q
_
_
+
1
_
_
C
T
z
D
T
z
0
D
T
z,w
_
_
_
C
z
D
z
0 D
z,w
+
_
_
0
T
1
G
1
2T
1
T
R
G
R
0 2T
R
0 D
T
v,w
T
1
D
T
c,w
T
R
I
q
_
_
< 0
e, mediante a aplicao do complemento de Schur, esta garantia dada pela vericao
de:
_
_
sym{A
T
P}
B
T
1
P +T
1
G
1
2T
1
B
T
R
P +T
R
G
R
0 2T
R
B
T
w
P D
T
v,w
T
1
D
T
c,w
T
R
I
q
C
z
D
z
0 D
z,w
I
r
_
_
< 0
Seja S
1
= T
1
1
e S
R
= T
1
R
, multiplicando-se a inequao anterior pela esquerda e direita
por:
BLKDG
__
T
S
1
S
R
I
q+m
_
,
e seu transposto, respectivamente, chega-se seguinte expresso:
_
_
sym{
T
A
T
P}
S
1
B
T
1
P +G
1
2S
1
S
R
B
T
R
P + G
R
0 2S
R
B
T
w
P D
T
v,w
D
T
c,w
I
q
C
z
D
z
S
1
0 D
z,w
I
r
_
_
< 0
73
Aplicando-se a substituio de matrizes propostas em (GOMES DA SILVA Jr. et al.,
2005), semelhantes utilizada no teorema 5.1, tem-se:
sym{
T
A
T
P} =
_
sym{AX +B
C}
A sym{Y A+
BC
y
}
_
A = Y AX +Y BD
c
CX +Y BC
c
M
T
+NB
c
CX +NA
c
M
T
B = Y BD
c
+NB
c
C = D
c
C
y
X +C
c
M
T
S
1
B
T
1
P =
_
S
1
B
T
1
S
1
B
1
Y +S
1
E
T
c
N
T
S
R
B
T
R
P =
_
S
R
B
T
S
R
B
T
Y +S
R
F
T
c
N
T
B
T
w
P =
_
B
T
w
+D
T
y,w
D
T
B
T
B
T
Y +B
T
c,w
N
T
+D
T
y,w
B
T
C
z
=
_
C
z
X C
z
G
i
=
_
G
i1
X +G
i2
M
T
G
i1
, i = 1, R
Sendo:
F
i
= G
i1
X +G
i2
M
T
, i = 1, R
Q
1
= G
R1
S
R
B
T
Y +S
R
F
T
c
N
T
chega-se a LMI (5.15a). As restries de incluso necessrias para a validade das condi-
es de setor utilizadas com
u
0
(v
c
) e
u
R
(y
c
) so expressas pelas LMIs em (5.15b). A
garantia de algum conjunto de inicializao impe a LMI > 0. O seginte termo:
B6
= B
T
Y +B
T
c,w
N
T
+D
T
y,w
B
T
apresenta a dependncia explcita de N, o que requer a LMI adicional sym{N} > 0,
pelos motivos apresentados e discutidos prova do teorema 5.1. A vericao de todas
estas LMIs garante o disposto nos itens 1, 2 e 3 do teorema 5.1.
5.5.2 Matriz de transferncia estritamente prpria, atuador mensurvel e entrada
do controlador livre de perturbao: D
y
= 0, v
c
= v
e B
c,w
= 0
Este caso especial corresponde a uma idealizao adicional a do anterior. Aqui assume-
se que a perturbao externa no possui conexo com os terminais de entrada do controla-
dor. Observe-se que mesmo que ela exista de fato, persiste a matriz D
y,w
para representar
seu efeito no modelo. Ainda, fcil vericar que a partir de (5.15a), se B
c,w
= 0 ento, o
termo
B6
cede lugar a:
B6
= B
T
Y +D
T
y,w
B
T
Assim desaparece qualquer meno explcita a N dentro das LMIs. A condio
sym{N} > 0 , ento, substituda por NM
T
= I
n+m
Y X, menos conservativa e
determinada a posteriori.
5.6 Problemas de Otimizao
Observe-se que as condies no teorema 5.2 so LMIs. Ento, se um critrio linear
usado, um timo global pode ser obtido. As condies no teorema 5.1 e no corolrio
5.1 so BMIs. Mediante esquemas de relaxao tambm possvel otimizar-se critrios
lineares. A relaxao de BMIs obtida xando-se uma das variveis de uma expresso
bilinear - possivelmente com o valor obtido pela soluo de uma LMI para o mesmo
problema - e resolvendo-se a LMI resultante desta substituio. A varivel livre xada
no valor encontrado, e a anteriormente pr-xada deixada livre em uma nova iterao.
Repete-se este processo at a satisfao de algum critrio de parada.
74
O objetivo desta seo a sntese de compensadores baseados em dois critrios: a
maximizao da perturbao admissvel - Tolerncia Perturbao - e a minimizao
do ganho L
2
entre a perturbao e a sada regulada z - Rejeio Perturbao. Por
simplicidade, em ambos os casos considerar-se- (0) = 0, o que implica que o sistema
est em equilbrio no instante inicial.
5.6.1 Tolerncia Perturbao
A suposio (0) = 0 torna
1
=
1
. A idia ento minimizar , o que maximiza
o limite da perturbao. Se w = 0, adicionalmente, obtm-se a soluo para o problema
de maximizao da regio de atrao da origem em malha fechada. De qualquer forma,
este problema s faz sentido quando a estabilidade em mbito global no est sendo consi-
derada. Para os teoremas e corolrios enunicados aqui, a mxima tolerncia perturbao
obtenvel da seguinte forma:
Para o teorema 5.2:
min
sujeito a (5.12), (5.4b), (5.4c) e (5.4d)
(5.16)
Para o corolrio 5.2:
min
sujeito a (5.15a), (5.15b), (5.15c) e (5.15d)
(5.17)
Para o teorema 5.1:
1. Estipular-se um valor inicial para S
1
.
2. Substitui-se o valor de S
1
obtido em 1 nas inequaes propostas.
3. Efetue-se:
min
sujeito a (5.4a), (5.4b), (5.4c) e (5.4d)
(5.18)
4. As matrizes
D,
B e Y obtidas so substitudas nas inequaes pelo valor obtido em
3. As demais variveis so mantidas.
5. Efetue-se:
min
sujeito a (5.4a), (5.4b), (5.4c) e (5.4d)
(5.19)
6. A matriz S
1
substituda nas inequaes pelo valor obtido em 5. As demais vari-
veis so mantidas.
7. Retorna-se a 3 at que algum critrio de parada torne-se verdadeiro.
A exemplo do discutido nos problemas de otimizao do captulo anterior, sugere-se ini-
cializar S
1
atravs do resultado obtido com o teorema 5.2.
75
5.6.2 Rejeio Perturbao
A considerao (0) = 0 torna
o limite para o mximo do ganho L
2
de w para z.
Ao contrrio da tolerncia, a rejeio perturbao passvel de otimizao independente
do mbito da estabilidade da origem do sistema em malha fechada - local ou global.
Assumindo-se que
1
fornecido, o seguinte problema pode ser abordado em cada um
dos teoremas e corolrios.
Para o teorema 5.2:
min
sujeito a (5.12), (5.4b), (5.4c) e (5.4d)
(5.20)
Para o corolrio 5.2:
min
sujeito a (5.15a), (5.15b), (5.15c) e (5.15d)
(5.21)
Para o teorema 5.1:
1. Estipular-se um valor inicial para S
1
.
2. Substitui-se o valor de S
1
obtido em 1 nas inequaes propostas.
3. Efetue-se:
min
sujeito a (5.4a), (5.4b), (5.4c) e (5.4d)
(5.22)
4. As matrizes
D,
B e Y obtidas so substitudas nas inequaes pelo valor obtido em
3. As demais variveis so mantidas.
5. Efetue-se:
min
sujeito a (5.4a), (5.4b), (5.4c) e (5.4d)
(5.23)
6. A matriz S
1
substituda nas inequaes pelo valor obtido em 5. As demais vari-
veis so mantidas.
7. Retorna-se a 3 at que algum critrio de parada torne-se verdadeiro.
5.7 Exemplos Numricos
Esta seo exemplica alguns mtodos desenvolvidos neste captulo e os problemas
de otimizao da seo 5.6. Assim como no captulo 4, o segundo exemplo numrico de
(GOMES DA SILVA Jr.; TARBOURIECH., 2005) utilizado de forma ilustativa.
O controlador neste caso substitudo pelo controlador sintetizado pelo mtodo em
estudo neste captulo. Adicionalmente a taxa de variao mxima do atuador foi restrita
pelo vetor u
R
=
_
1 1
T
.
Neste sistema aplicou-se os mtodos de sntese simultnea de controlador com laos
de anti-windup sujeitos a restrio do atuador em amplitude e taxa de variao.
Simulaes feitas no ambiente Simulink do Matlab
2
exibem o comportamento do
sistema em malha fechada.
2
Simulink e Matlab so marcas registradas da Mathworks
76
0 1 2 3 4 5 6 7 8 9 10
0
0.2
0.4
0.6
0.8
1
1.2
1.4
z(t)
Tempo
z
Figura 5.2: Sinal z
Para o sistema (4.47a) com a restrio adicional da taxa de variao do atuador,
determinou-se um controlador dinmico com laos anti-windup de acordo com o pro-
blema de maximizao da tolerncia para o teorema 5.2. A planta foi sujeita uma per-
turbao de norma L
2
igual a 14.586, cuja manifestao durou 1 segundo. O seguinte
conjunto de matrizes foi obtido:
A
c
= 1.0 10
7
_
_
0.0009 0.0000 0.0000 0.0000
0.0002 0.0000 0.0000 0.0000
6.5335 0.0953 0.0325 0.0011
3.1445 0.0462 0.0012 0.0432
_
_
B
c
=
_
_
2.8148 0.0378 0.0002 0.0000
0.0378 1.8283 0.0001 0.0019
0.0194 0.0008 0.3861 0.0010
0.0161 0.0014 0.3554 0.5250
_
_
C
c
= 1.0 10
7
_
3.0523 0.0445 0.0152 0.0005
1.4689 0.0216 0.0006 0.0202
_
D
c
= 1.0 10
8
_
0.0092 0.0003 0.2815 0.0005
0.0075 0.0002 0.1660 0.2121
_
E
c
=
_
_
0.4649 0.0035
0.0136 0.0001
0.0034 0.0007
0.0001 0.0163
_
_
F
c
=
_
_
0.0000 0.0000
0.0000 0.0002
2.1409 0.0002
0.0002 2.1413
_
_
(5.24)
As guras 5.2, 5.3, 5.4 ilustram respectivamente os grcos obtidos para a sada contro-
lada z, a entrada de controle u, a perturbao w, controle excedente em amplitude,
u
0
(v
c
)
e controle excedente em taxa de variao
u
R
(y
c
).
A tabela ao nal deste captulo mostra o compromisso entre os problemas de minimi-
zar e nos teoremas 4.1 e 4.3. A varivel nestes teoremas corresponde ao inverso
do quadrado da mxima norma L
2
de uma perturbao tolervel pelo sistema quando ini-
cializado na origem. A varivel , por sua vez, corresponde ao quadrado do limitante
superior ao ganho L
2
garantido pertubao sada controlada.
Na tabela 5.7 possvel observar-se o trade-off entre tolerncia e atenuao da pertur-
bao. medida que aumenta, ou seja, a tolerncia perturbao diminui, a atenuo
que o sistema aplica perturbao cresce.
77
0 1 2 3 4 5 6 7 8 9 10
0.06
0.05
0.04
0.03
0.02
0.01
0
0.01
0.02
u(t)
Tempo
u
Figura 5.3: Sinal u
Tabela 5.1: Trade-off Tolerncia Atenuao para a perturbao externa.
Relao
5 10
3
8.35 10
4
1 10
2
9.24 10
2
1 10
1
9.64 10
1
2 10
1
5.46 10
1
5 10
1
2.68 10
1
1 10
0
1.59 10
1
2 10
0
9.63 10
0
5 10
0
3.08 10
0
1 10
1
6.32 10
1
1 10
2
1.33 10
1
1 10
3
5.28 10
2
78
0 1 2 3 4 5 6 7 8 9 10
0
5
10
15
w(t)
Tempo
w
Figura 5.4: Sinal w
79
6 CONCLUSES E PERSPECTIVAS
Este trabalho apresentou contribuies ao problema de compensao dinmica de sis-
temas lineares contnuos sujeitos a saturao de controle. So poucas as publicaes que
propem mtodos de compensao dinmica de sada que garantam a estabilidade da ori-
gem em plantas instveis em malha aberta e sujeitas a controle restrito. Ainda, poucos
trabalhos h que abordem a sntese simultnea de um controlador dinmico de sada e
laos anti-windup. O desenvolvimento de mtodos de sntese para estes problemas foi
feito atravs da extenso dos resultados de (TARBOURIECH; GOMES DA SILVA Jr.;
BENDER, 2006) no caso de compensao dinmica de anti-windup, e de (GOMES DA
SILVA Jr. et al., 2005) no caso da sntese de controladores dinmicos.
Para a compensao anti-windup dinmica, apresentou-se mtodos de sntese de com-
pensadores de ordem plena e reduzida. Para o caso de ordem plena, o mtodo proposto
garante a estabilidade da origem em malha fechada para sistemas sujeitos a restries na
amplitude do atuador. Considerou-se a presena de perturbaes limitadas em norma L
2
,
obtendo-se um limitante superior para o ganho L
2
da perturbao externa na sada contro-
lada da planta e uma estimativa dos conjuntos atingveis pelas trajetrias e de inicializao
do sistema.
Na ausncia de perturbao a origem garantida assintoticamente estvel. O mtodo
ainda explorado em problemas de otimizao para maximizar a norma L
2
da perturbao
tolervel pelo sistema, e minimizar o ganho L
2
da perturbao na sada controlada do
sistema. Exemplos numricos evidenciaram os efeitos do mtodo. Para os casos em que
desejvel a implementao de compensador de menor ordem, apresentou-se mtodos
de sntese de compensadores anti-windup de ordem reduzida. A estabilidade da origem
em malha fechada foi garantida e a perturbao externa teve sua tolernica e atenuao
maximizados em problemas distintos. Todavia, condies matriciais lineares no foram
obtidas seno pela aplicao do lema de Finsler. Embora os mtodos baseados em BMIs
apresentem diculdades computacionais e percam a garantia de otimizao global quando
esquemas de relaxao lhes so aplicados, podem estender o mtodo de sntese linear
quando o resultado de otimizaes lineares for utilizado como soluo inicial. Neste
captulo apenas a restrio em amplitude do atuador foi considerada.
Para a sntese de controladores dinmicos, props-se um mtodo que sintetiza simul-
taneamente o controlador e laos de anti-windup em uma planta onde alm da amplitude,
a taxa de variao do atuador restrita. A estabilidade em malha fechada da origem ga-
rantida. Considerou-se a presena de perturbaes limitadas em norma L
2
, obtendo-se um
limitante superior para o ganho L
2
da perturbao externa na sada controlada da planta
e uma estimativa dos conjuntos atingveis pelas trajetrias e de inicializao do sistema.
Na ausncia de perturbao garante-se a origem assintoticamente estvel. O mtodo
explorado em problemas de otimizao para maximizar a norma L
2
da perturbao tole-
80
rvel pelo sistema, e minimizar o ganho L
2
da perturbao manifesto na sada controlada.
Exemplos numricos evidenciaram os efeitos do mtodo.
Todos os mtodos propostos tiveram suas condies sucientes expressas por LMIs.
O modelo da planta utilizado no apresentava uma matriz de transferncia estritamente
prpria, o que fez necessria a garantia da wellposedness da matriz de transferncia do
sistema em malha fechada. Adicionalmente, pelos diversos acoplamentos de perturba-
es considerados alguns resultados iniciais apresentaram-se como condies bilineares
de soluo. Por conseguinte, foram linearizadas atravs do lema de Finsler, que insere
multiplicadores em uma representao distinta a partir das restries originais. Por ser
uma representao equivalente, xar elementos dos multiplicadores restringe os graus de
liberdade originais, mas permite linearizar as restries. Desta forma, tomou-se muito
cuidado para que a estrutura fosse minimamente xada.
Os problemas de sntese de compensadores anti-windup dinmicos e sntese direta
de controlador, abordados nos captulos 4 e 5, respectivamente, apreentaram em sues
problemas de otimizao, um claro trade-off entre tolerncia e atenuao de perturbaes
externas. possvel explicar tal relao pelo fato de que comcontrole limitado, a presena
de perturbaes maiores no sistema, implicar em ganhos tambm maiores na sada da
planta, na medida em ocorra a saturao de controle.
O presente trabalho possui um grande nmero de possibilidades de continuao. As
que o autor pretende seguir so:
a) Sntese de compesadores anti-windup para sistemas lineares sujeitos saturao do
atuador em amplitude e taxa de variao com um controlador nominal dado a priori.
b) Utilizao de funes de Liapunov quadrticas de termo polinomial completo.
c) Sntese de compensadores anti-windup para sistemas lineares sujeitos a restries do
atuador em amplitude e acelerao.
d) Estender os mtodos desenvolvidos ao problema de seguimento de referncia;
e) Investigar formas apropriadas de garantir-se o sistema estudado no captulo 5 well-
posed.
Tanto melhor, lutaremos sombra.
81
REFERNCIAS
BERNSTEIN, D. The optimal projection equations for static and dynamic output feed-
back: the singular case. IEEE Transactions on Automatic Control, New York, v.12,
p.11391143, Dec. 1987.
BERNSTEIN, D. S.; MICHEL, A. N. A chronological bibliography on saturating actua-
tor. Int. Journal of Robust and Nonlinear Control, New Jersey, v.5, p.375380, 1995.
BOYD, S.; GHAOUI, E.; FERON, E.; BALAKRISHNAN, V. Linear Matrix Inequali-
ties in System and Control Theory. 1st.ed. Philadelphia, PA: SIAM, 1994.
BURGAT, C.; TARBOURIECH, S. Global stability of a class of systems with satura-
ted controls. International Journal of Systems and Science, Abingdon, v.23, p.3756,
1992.
CASTELAN, E. B.; QUEINNEC, I.; TARBOURIECH, S.; GOMES DA SILVA JR., J. M.
LMI approach for L2-control of linear systems with saturating actuators. In: IFAC SYM-
POSIUM ON NONLINEAR CONTROL SYSTEMS, 6., 2004, Stuttgart, Germany. Pro-
ceedings. . . Kidlington: Oxford, 2004. p.287292d.
COUTINHO, D. F.; D. J. PAGANO, A. T. On the estimation of robust stability regions
for nonlinear systems with saturation. Sociedade Brasileira de Automtica, Campinas,
SP, Brasil, v.15, p.269278, Sep. 2004.
DORATO, P. Robust Control. New York: IEEE Press, 1987.
FERTIK, H. A.; ROSS, C. W. Direct digital control algorithm with anti-windup feature.
ISA Transactions, Chapel Hill, v.6, p.317328, 1967.
FINSLER, P. ber das vorkommen deniter und semideniter formen in scharen qua-
dratischen formen. Commentarii Mathematici Helvetici, Zurich, SU, v.9, p.188192,
Feb. 1937.
GOMES DA SILVA Jr., J. M. Sur la Stabilit Locale de Systmes Linaires avec Satu-
ration des Commandes. 1997. Tese (Doutorado em Cincia da Computao) , Tou-
lousse, France.
GOMES DA SILVA Jr., J. M.; FISCHMAN, A.; TARBOURIECH, S.; DION, J.; DU-
GARD., L. Synthesis of state feedback for linear systems subject to control saturation by
an LMI-based approach. In: IFAC SYMPOSIUM ON ROBUST CONTROL, 2., 1997,
Budapest, Hungary. Proceedings. . . Kidlington: Oxford, 1997. p.229234.
82
GOMES DA SILVA Jr., J. M.; LIMON, D.; ALAMO, T.; CAMACHO., E. Dynamic
output feedback for discrete-time systems under amplitude and rate actuator constraints.
In: IEEE CONFERENCE ON DECISION AND CONTROL, 44., 2005, Sevilla, Spain.
Proceedings. . . New York, 2005.
GOMES DA SILVA Jr., J. M.; TARBOURIECH., S. Anti-Windup design with guaranted
regions of stability: an lmi-based approach. In: IEEE CONFERENCE ON DECISION
AND CONTROL, 42., 2003, Maui, USA. Proceedings. . . New York, 2003.
GOMES DA SILVA Jr., J. M.; TARBOURIECH., S. Anti-Windup design with guaranted
regions of stability: an lmi-based approach. IEEE Trans. on Automatic Control, New
York, v.50, p.106111, 2005.
GOMES DA SILVA Jr., J. M.; TARBOURIECH, S.; GARCIA, G. Local stabilization
of linear systems under amplitude and rate saturating actuators. IEEE Transactions on
Automatic Control, New York, v.48, p.842847, May 2003.
GOMES DA SILVA Jr., J. M.; TARBOURIECH, S.; REGINATTO, R. Analysis of regi-
ons of stability for linear systems with saturating inputs through an anti-windup scheme.
In: IEEE CONFERENCE ON CONTROL APPLICATIONS, 2002, Glasgow, Scotland.
Proceedings. . . New York, 2002.
GOMES DA SILVA Jr., J. M.; TARBOURIECH, S.; REGINATTO., R. Application of
hybrid and polytopic modeling to the stability analysis of linear systems with saturating
inputs. Revista Controle Automao (SBA), Natal, v.15, p.401412, 2004.
GOMES DA SILVA Jr., J.; TARBOURIECH, S. Polyhedral regions of local asymptotic
stability for discrete-time linear sytems with saturating controls. IEEE Trans. on Auto-
matic Control, New York, v.44, p.20812086, 1999.
GOMES DA SILVA Jr., J.; TARBOURIECH, S. Local stabilization of discrete-time linear
systems with saturating controls an LMI-based approach. IEEE Trans. on Automatic
Control, New York, v.46, p.119125, 2001.
GRIMM, G.; HATFIELD, J.; POSTLETHWAITE, I.; TEEL, A. R.; TURNER, M. C.;
ZACCARIAN, L. Antiwindup for stable linear systems with input saturation: an lmi-
based synthesis. IEEE Transactions on Automatic Control, New York, v.48, p.1509
1525, 2003.
HINDI, H.; BOYD, S. Analysis of linear systems with saturation using convex optimi-
zation. In: IEEE CONFERENCE ON DECISION AND CONTROL, 37., 1998, Tamba,
USA. Proceedings. . . New York, 1998. p.903908.
HU, T.; LIN, Z. Control Systems with Actuator Saturation: analysis and design. Bos-
ton: Birkhuser, 2001.
HU, T.; LIN, Z.; CHEN, B. M. An analysis and design method for linear systems subject
to actuator saturation and disturbance. Automatica, Kidlington, v.38, p.351359, 2002.
KAPILA, V.; GRIGORIADIS, K. Actuator Saturation Control. New York: Marcel
Dekker, Inc., 2002. p.320.
KHALIL, H. Nonlinear Systems. 2.ed. New Jersey: Prentice-Hall, Inc., 1996. p.734.
83
KOTHARE, M. V.; CAMPO, P. J.; MORARI, M.; NETT, C. N. A unied framework for
the study of anti-windup designs. Automatica, Kidlington, v.30, p.18691883, 1994.
LIAPUNOV, A. M. General Problems in the Stability of Motion (in Russian). 1892.
Thesis (PhD) Moscow University, Kharkow.
LIN, Z.; SABERI, A. Semiglobal exponential stabilization of linear systems subject to
input saturation via linear feedback. Systems and Control Letters, North-Holland, v.21,
p.225239, 1993.
MIYAMOTO, A.; VINNICOMBE, G. Robust control of plants with saturation nonline-
arity based on coprime factor representation. In: IEEE CONFERENCE ON DECISION
AND CONTROL, 35., 1996, Kobe, Japan. Proceedings. . . New York, 1996. p.2838
2840.
MULDER, E. F.; KOTHARE, M. V.; MORARI, M. Multivariable anti-windup controller
synthesis using linear matrix inequalities. Automatica, Kidlington, v.37, p.14071416,
Sep. 2001.
NGUYEN, T.; JABBARI, F. Output Feedback controllers for disturbance attenuation
with actuator amplitude and rate saturation. Automatica, Kidlington, v.36, p.13391346,
2000.
PAIM, C. Anlise e Controle de Sistemas Lineares sob Saturao. 2003. Tese de Dou-
torado Universidade Federal de Santa Catarina, Florianpolis, Brasil.
PAIM, C.; TARBOURIECH, S.; GOMES DA SILVA Jr., J. M.; CASTELAN, E. B. Con-
trol design for linear systems with saturating actuators and L
2
-bounded disturbances. In:
IEEE CONFERENCE ON DECISION AND CONTROL, 41., 2002, Las Vegas, USA.
Proceedings. . . New York, 2002.
PITTET, C.; TARBOURIECH, S.; BURGAT, C. Stability regions for linear systems with
saturating controls via circle and Popov criteria. In: IEEE CONFERENCE ON DECI-
SION AND CONTROL, 36., 1997, San Diego, USA. Proceedings. . . New York, 1997.
p.45184523.
REGINATTO, R. Contribuies ao Projeto de Controladores No-Lineares para Sis-
temas com Restries no Controle. 2000. Tese de Doutorado Universidade Federal
de Santa Catarina, Florianpolis, Brasil.
SCHERER, C.; GAHINET, P.; CHILALI, M. Multiobjective output feedback control via
LMI optimization. IEEE Transactions on Automatic Control, New York, v.42, p.896
911, July 1997.
SCHUR, J. ber Potenzreihen, die im Innern des Einheitskreises beschrnkt sind. Jour-
nal fr die reine und angewandte Mathematik, Berlin, Deutschland, v.148, p.122145,
1918.
SONTAG, E. D.; SUSSMANN, H. D. Nonlinear output feedback design for linear sys-
tems with saturation control. In: IEEE CONFERENCE ON DECISION AND CON-
TROL, 29., 1990, Honolulu, USA. Proceedings. . . New York, 1990. p.34143416.
84
STOORVOGEL, A. A.; SABERI, A. Output regulation for linear systems to amplitude
plus rate saturating actuators. International Journal of Robust and Nonlinear Control,
New Jersey, v.9, p.631657, Oct. 1999.
TARBOURIECH, S. Sur la Stabilit des Regulateurs Retour dtat Satur. 1991.
Tese (Doutorado em Cincia da Computao) , Universit Paul Sabatier, Toulouse,
France.
TARBOURIECH, S.; GARCIA, G. Control of uncertain systems with bounded inputs.
Berlin: Springer Verlag., 1997. p.186.
TARBOURIECH, S.; GOMES DA SILVA Jr., J. M.; BENDER, F. A. Dynamic anti-
windup synthesis for discrete-time linear systems subject to input saturation and L
2
dis-
turbances. In: IFAC SYMPOSIUM ON ROBUST CONTROL DESIGN, 5., 2006, Tou-
louse, France. Proceedings. . . Kidlington: Oxford, 2006. p.665682.
TEEL, A. R.; KAPPOR, N. The L
2
problem: its denition and solution. In: EUCA
EUROPEAN CONTROL CONFERENCE, 1997, Cambridge, England. Proceedings. . .
New York, 1997.
TYAN, F.; BERNSTEIN, D. S. Dynamic output feedback compensation for linear sys-
tems with independent amplitude and rate saturation. International Journal of Control,
Abingdon, v.67, p.89116, Jan. 1997.
WALGAMA, K. S.; STERNBY, J. Inherent observer property in a class of anti-windup
compeensators. International Journal of Control, Brussels, Belgium, v.52, p.705724,
1990.
WEISSTEIN, E. W. Acesso em: http://mathworld.wolfram.com/WellDened.html.
ZACCARIAN, L.; TEEL, A. R. A common framework for anti-windup, bumpless transfer
and reliable designs. Automatica, Kidlington, v.38, 2002.
Você também pode gostar
- MEDCON4W internacionalização estratégiaDocumento2 páginasMEDCON4W internacionalização estratégiafernandoabel010% (1)
- 72 - Cessacao e Tratamento Do TabagismoDocumento60 páginas72 - Cessacao e Tratamento Do TabagismoAlex Batista OliveiraAinda não há avaliações
- Situacao Problema Gestao Estrategica RHDocumento2 páginasSituacao Problema Gestao Estrategica RHCamilla CrivelaroAinda não há avaliações
- Orientações para o Estudo 2.4 Norbert Elias e A Sociologia FiguracionalDocumento4 páginasOrientações para o Estudo 2.4 Norbert Elias e A Sociologia FiguracionalRuiAinda não há avaliações
- OnzeneiroDocumento10 páginasOnzeneiroFernanda MaiaAinda não há avaliações
- 3 Lista de Apoio - Recuperação Do 2º TrimestreDocumento2 páginas3 Lista de Apoio - Recuperação Do 2º TrimestreBianca N C BasilioAinda não há avaliações
- Robert N Gunn - Duplex Stainless Steels, Microstructure, Properties and Applications (1997, Woodhead Publishing)Documento18 páginasRobert N Gunn - Duplex Stainless Steels, Microstructure, Properties and Applications (1997, Woodhead Publishing)Fabiana SantosAinda não há avaliações
- Queda Livre Massa AceleraçãoDocumento2 páginasQueda Livre Massa AceleraçãoJoão GuerraAinda não há avaliações
- Ética e Cidadania para o Ensino Fundamental - Exam - VladiDocumento6 páginasÉtica e Cidadania para o Ensino Fundamental - Exam - VladiMichele SilvaAinda não há avaliações
- Resultado Final 1052 - 20Documento1 páginaResultado Final 1052 - 20lsbatistal1466Ainda não há avaliações
- Anexo 2 - Demanda Das Linhas de OnibusDocumento159 páginasAnexo 2 - Demanda Das Linhas de OnibusIME EmailAinda não há avaliações
- Teatro popular de Gil VicenteDocumento37 páginasTeatro popular de Gil VicenteLUKE SHELTONAinda não há avaliações
- KERN - Ações Afirmativas e Politizacao Da Questao RacialDocumento18 páginasKERN - Ações Afirmativas e Politizacao Da Questao RacialWilliane PontesAinda não há avaliações
- Interpretacao de Texto. SlidesDocumento29 páginasInterpretacao de Texto. SlidesAltair AntunesAinda não há avaliações
- Programação de shell no WindowsDocumento202 páginasProgramação de shell no WindowsGeorge Duarte LemosAinda não há avaliações
- LipidoseDocumento10 páginasLipidoseSérgio HenriqueAinda não há avaliações
- EpigenéticaDocumento53 páginasEpigenéticaPri LuAinda não há avaliações
- RESUMODocumento4 páginasRESUMOJoão Vitor Farias UFCAinda não há avaliações
- 1122 Prodmução de Kit Cesta BásicaDocumento13 páginas1122 Prodmução de Kit Cesta BásicaJaasiel Neres Maiane BritoAinda não há avaliações
- Divisão Do Sistema Esquelético e Ossos Do Crânio SANARFLIXDocumento21 páginasDivisão Do Sistema Esquelético e Ossos Do Crânio SANARFLIXIzabella ArrudaAinda não há avaliações
- Ebook - Confeccao 4.0Documento11 páginasEbook - Confeccao 4.0João SacheteAinda não há avaliações
- Operação Da EscavadeiraDocumento5 páginasOperação Da Escavadeiradrico12Ainda não há avaliações
- Ex Alv EditavelDocumento23 páginasEx Alv EditavelFrederico MorgadoAinda não há avaliações
- Carderno ArtesDocumento58 páginasCarderno Artesadilson_Ainda não há avaliações
- Cálculo de Duração Das Atividades para Os Alunos Sem RespostaDocumento6 páginasCálculo de Duração Das Atividades para Os Alunos Sem RespostaRicardo Sousa CruzAinda não há avaliações
- JESUS NO SEPULCRODocumento46 páginasJESUS NO SEPULCROAlexandre Siqueira100% (1)
- Sistema Score 2022Documento5 páginasSistema Score 2022celia pecciniAinda não há avaliações
- John McCarthyDocumento6 páginasJohn McCarthyfilipe.diniz.xdAinda não há avaliações
- Instruções de SegurançaDocumento10 páginasInstruções de Segurançaliliana0castro_1Ainda não há avaliações
- Esforços internos e externos em estruturasDocumento44 páginasEsforços internos e externos em estruturasCalebe CostaAinda não há avaliações