Você também pode gostar
- L6208D To L6208PDDocumento16 páginasL6208D To L6208PDwtn2013Ainda não há avaliações
- Datasheet L6229Documento25 páginasDatasheet L6229Raul Sense MejiaAinda não há avaliações
- Tb62206Fg: Bicd PWM 2 Phase Bipolar Stepping Motor DriverDocumento28 páginasTb62206Fg: Bicd PWM 2 Phase Bipolar Stepping Motor DriverLuis Alejandro Blanco CalvoAinda não há avaliações
- STA323W: 2.1 High Efficiency Digital Audio SystemDocumento41 páginasSTA323W: 2.1 High Efficiency Digital Audio SystemsteonistAinda não há avaliações
- LMD18201 3A, 55V H-Bridge: General DescriptionDocumento8 páginasLMD18201 3A, 55V H-Bridge: General DescriptionNairo FilhoAinda não há avaliações
- Datasheet Amp DVD Philips Dumbo PDFDocumento17 páginasDatasheet Amp DVD Philips Dumbo PDFfreekenzoAinda não há avaliações
- +3 Volt, Serial Input Complete 12-Bit DAC AD8300Documento8 páginas+3 Volt, Serial Input Complete 12-Bit DAC AD8300jnax101Ainda não há avaliações
- Data SheetDocumento20 páginasData SheetLuis Fernando ChiavegatiAinda não há avaliações
- Microstepping DMOS Driver With Translator: Description Features and BenefitsDocumento18 páginasMicrostepping DMOS Driver With Translator: Description Features and BenefitsSaid BoubkerAinda não há avaliações
- Features Descriptio: LTC485 Low Power RS485 Interface TransceiverDocumento12 páginasFeatures Descriptio: LTC485 Low Power RS485 Interface TransceiverSidumisile SikhosanaAinda não há avaliações
- Hqew Tle5216Documento17 páginasHqew Tle5216Olga PlohotnichenkoAinda não há avaliações
- Ds92Lv16: Ds92Lv16 16-Bit Bus Lvds Serializer/Deserializer - 25 - 80 MHZDocumento21 páginasDs92Lv16: Ds92Lv16 16-Bit Bus Lvds Serializer/Deserializer - 25 - 80 MHZlur46Ainda não há avaliações
- LMD 18200Documento14 páginasLMD 18200Itzamary Romero SosaAinda não há avaliações
- 28V 2A Step-Down Switching Regulator: Power Management Features DescriptionDocumento19 páginas28V 2A Step-Down Switching Regulator: Power Management Features DescriptionLuis Espino PérezAinda não há avaliações
- Tle6220gp DatasheetDocumento18 páginasTle6220gp Datasheetmaelo99999Ainda não há avaliações
- MAX31865 RTD-to-Digital Converter: General Description FeaturesDocumento25 páginasMAX31865 RTD-to-Digital Converter: General Description FeaturespaKoSTe1Ainda não há avaliações
- Features Applications: X+ X - Y+ YDocumento35 páginasFeatures Applications: X+ X - Y+ YAlvaro ChaconAinda não há avaliações
- Ad 421Documento14 páginasAd 421Vishal Devrao JadhavAinda não há avaliações
- Ir 2156Documento24 páginasIr 2156anon_702708521Ainda não há avaliações
- Dual Full-Bridge Driver: DescriptionDocumento13 páginasDual Full-Bridge Driver: DescriptionBaher Bassem MorkosAinda não há avaliações
- sc7001q Ay 961Documento18 páginassc7001q Ay 961r2c1Ainda não há avaliações
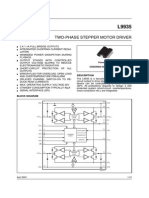
- Two-Phase Stepper Motor Driver: DescriptionDocumento19 páginasTwo-Phase Stepper Motor Driver: DescriptionDan EsentherAinda não há avaliações
- 7214Documento12 páginas7214Dan EsentherAinda não há avaliações
- ADC0844/ADC0848 8-Bit P Compatible A/D Converters With Multiplexer OptionsDocumento20 páginasADC0844/ADC0848 8-Bit P Compatible A/D Converters With Multiplexer Optionsrazali1982Ainda não há avaliações
- Ak 5358Documento18 páginasAk 5358Alver TuizaAinda não há avaliações
- Ir 2153Documento8 páginasIr 2153oasdopdasAinda não há avaliações
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CDocumento14 páginasLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiAinda não há avaliações
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocumento18 páginasADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesMarco MenezesAinda não há avaliações
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocumento17 páginasADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesJorge Luis Castillo GuarachiAinda não há avaliações
- AFT05MP075NDocumento21 páginasAFT05MP075NjeremyAW2SAinda não há avaliações
- Driver Mosfet TC428Documento16 páginasDriver Mosfet TC428jaimeAinda não há avaliações
- BLDC MainDocumento24 páginasBLDC MainGeralt VesemirAinda não há avaliações
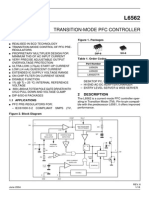
- Transition-Mode PFC Controller: 1 FeaturesDocumento17 páginasTransition-Mode PFC Controller: 1 Featuresadriancho66Ainda não há avaliações
- 2.7V Dual Channel 12-Bit A/D Converter With SPI Serial InterfaceDocumento34 páginas2.7V Dual Channel 12-Bit A/D Converter With SPI Serial InterfaceManjunatha Ac100% (1)
- Ir 2153Documento9 páginasIr 2153Carlos Marinho SilvaAinda não há avaliações
- MC33030PDocumento17 páginasMC33030PGisela ValdezAinda não há avaliações
- 1267379259Documento7 páginas1267379259sinasayedanaAinda não há avaliações
- D Escriptio: S FeatureDocumento8 páginasD Escriptio: S Featurevsc2012Ainda não há avaliações
- 1-Tle6240gp V3 1 1Documento24 páginas1-Tle6240gp V3 1 1Alexandre Da Silva PintoAinda não há avaliações
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocumento26 páginasVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksAinda não há avaliações
- Quad Power Amplifier With Built-In Voltage Converter: DescriptionDocumento10 páginasQuad Power Amplifier With Built-In Voltage Converter: DescriptionbakaninhaAinda não há avaliações
- MC 34152Documento12 páginasMC 34152dcastrelos2000Ainda não há avaliações
- Mach Cong Suat Cau H - Lmd18200Documento14 páginasMach Cong Suat Cau H - Lmd18200hieuhuech1Ainda não há avaliações
- Quad Low Side Driver: DescriptionDocumento17 páginasQuad Low Side Driver: DescriptionDan EsentherAinda não há avaliações
- Ha 13563Documento18 páginasHa 13563Danh ProAinda não há avaliações
- L293D Datasheet PDFDocumento8 páginasL293D Datasheet PDFSanjay PatilAinda não há avaliações
- M62301SP, FP: Description Pin Configuration (Top View)Documento9 páginasM62301SP, FP: Description Pin Configuration (Top View)roozbehxoxAinda não há avaliações
- Octal D-Type Latch With 3 State Outputs (Non Inverted) : Order CodesDocumento11 páginasOctal D-Type Latch With 3 State Outputs (Non Inverted) : Order CodesIsaacAinda não há avaliações
- 3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingDocumento12 páginas3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingPero01Ainda não há avaliações
- LM3530 High Efficiency White LED Driver With Programmable Ambient Light Sensing Capability and I C-Compatible InterfaceDocumento45 páginasLM3530 High Efficiency White LED Driver With Programmable Ambient Light Sensing Capability and I C-Compatible Interfacethoth2487Ainda não há avaliações
- ADC0820 NationalDocumento23 páginasADC0820 NationalePotyAinda não há avaliações
- TS324/TS2902: Low Power Quad Operational AmplifiersDocumento8 páginasTS324/TS2902: Low Power Quad Operational AmplifiersRana AhmadAinda não há avaliações
- MSM6544Documento13 páginasMSM6544Shuvamay GuhaAinda não há avaliações
- Datasheet L272MDocumento10 páginasDatasheet L272MJavier JaviAinda não há avaliações
- TC427CPADocumento5 páginasTC427CPASherif OkdaAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Analog Circuit Design Volume Three: Design Note CollectionNo EverandAnalog Circuit Design Volume Three: Design Note CollectionNota: 3 de 5 estrelas3/5 (2)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsNo EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsNota: 3.5 de 5 estrelas3.5/5 (6)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsAinda não há avaliações
- Maintenance Manual FOR Jabiru 2200 Aircraft Engine Jabiru 3300 Aircraft Engine DOCUMENT No. JEM0002-9 Dated: 8 Nov 2019Documento103 páginasMaintenance Manual FOR Jabiru 2200 Aircraft Engine Jabiru 3300 Aircraft Engine DOCUMENT No. JEM0002-9 Dated: 8 Nov 2019Ricardo UrioAinda não há avaliações
- A-65 & A-75 SeriesDocumento77 páginasA-65 & A-75 SeriesRicardo UrioAinda não há avaliações
- CD Testdata: Bosch Diagnostics SoftwareDocumento1 páginaCD Testdata: Bosch Diagnostics SoftwareRicardo UrioAinda não há avaliações
- ACS724LMC, ACS725LMC: High Accuracy Hall-Effect-Based Current Sensor with 265 µΩ Integrated ConductorDocumento17 páginasACS724LMC, ACS725LMC: High Accuracy Hall-Effect-Based Current Sensor with 265 µΩ Integrated ConductorRicardo UrioAinda não há avaliações
- 1 MHZ Bandwidth, Galvanically Isolated Current Sensor Ic in Small Footprint Soic8 PackageDocumento26 páginas1 MHZ Bandwidth, Galvanically Isolated Current Sensor Ic in Small Footprint Soic8 PackageRicardo UrioAinda não há avaliações
- Ultimatum Fuzz: The Ultimate Experience in Vintage-Style Octave-Up FuzzDocumento9 páginasUltimatum Fuzz: The Ultimate Experience in Vintage-Style Octave-Up FuzzRicardo UrioAinda não há avaliações
- Ultimatum Fuzz: The Ultimate Experience in Vintage-Style Octave-Up FuzzDocumento9 páginasUltimatum Fuzz: The Ultimate Experience in Vintage-Style Octave-Up FuzzRicardo UrioAinda não há avaliações
- Bricotahe Octave Kit Building ManualDocumento10 páginasBricotahe Octave Kit Building ManualRicardo UrioAinda não há avaliações
- ACS72981xLR: High-Precision Linear Hall-Effect-Based Current Sensor IC with 200 µΩ Current ConductorDocumento54 páginasACS72981xLR: High-Precision Linear Hall-Effect-Based Current Sensor IC with 200 µΩ Current ConductorRicardo UrioAinda não há avaliações
- Ultimatum Fuzz: The Ultimate Experience in Vintage-Style Octave-Up FuzzDocumento9 páginasUltimatum Fuzz: The Ultimate Experience in Vintage-Style Octave-Up FuzzRicardo UrioAinda não há avaliações
- Canada: Electrical SpecificationsDocumento2 páginasCanada: Electrical SpecificationsRicardo UrioAinda não há avaliações
- BYOC Octave Fuzz Kit Instructions: WarrantyDocumento20 páginasBYOC Octave Fuzz Kit Instructions: WarrantyRicardo UrioAinda não há avaliações
- HK1400Documento82 páginasHK1400Ricardo Urio100% (3)
- L4916Documento8 páginasL4916Ricardo UrioAinda não há avaliações
- LT6108Documento30 páginasLT6108Ricardo UrioAinda não há avaliações
- Measurement of Liquid DensityDocumento144 páginasMeasurement of Liquid DensityRicardo UrioAinda não há avaliações
- Preliminary: MPC855T Communications Controller Technical SummaryDocumento16 páginasPreliminary: MPC855T Communications Controller Technical SummaryRicardo UrioAinda não há avaliações
- DSP16000 Funcoes PDFDocumento6 páginasDSP16000 Funcoes PDFRicardo UrioAinda não há avaliações
- U PD77111Documento221 páginasU PD77111Ricardo UrioAinda não há avaliações
- Features: RL201 Thru RL207Documento3 páginasFeatures: RL201 Thru RL207Ricardo UrioAinda não há avaliações
- Opc PPT FinalDocumento22 páginasOpc PPT FinalnischalaAinda não há avaliações
- Pivot TableDocumento19 páginasPivot TablePrince AroraAinda não há avaliações
- Project - New Restuarant Management System The Grill HouseDocumento24 páginasProject - New Restuarant Management System The Grill HouseMayank Mahajan100% (3)
- Review1 ScheduleDocumento3 páginasReview1 Schedulejayasuryam.ae18Ainda não há avaliações
- Quantitative Methods For Economics and Business Lecture N. 5Documento20 páginasQuantitative Methods For Economics and Business Lecture N. 5ghassen msakenAinda não há avaliações
- DN Cross Cutting IssuesDocumento22 páginasDN Cross Cutting Issuesfatmama7031Ainda não há avaliações
- Ricoh IM C2000 IM C2500: Full Colour Multi Function PrinterDocumento4 páginasRicoh IM C2000 IM C2500: Full Colour Multi Function PrinterKothapalli ChiranjeeviAinda não há avaliações
- Evaluation TemplateDocumento3 páginasEvaluation Templateapi-308795752Ainda não há avaliações
- Lesson PlanDocumento2 páginasLesson Plannicole rigonAinda não há avaliações
- C - Amarjit Singh So Bhura SinghDocumento5 páginasC - Amarjit Singh So Bhura SinghRohit JindalAinda não há avaliações
- ME Eng 8 Q1 0101 - SG - African History and LiteratureDocumento13 páginasME Eng 8 Q1 0101 - SG - African History and Literaturerosary bersanoAinda não há avaliações
- Spesifikasi PM710Documento73 páginasSpesifikasi PM710Phan'iphan'Ainda não há avaliações
- WL-80 FTCDocumento5 páginasWL-80 FTCMr.Thawatchai hansuwanAinda não há avaliações
- Electro Fashion Sewable LED Kits WebDocumento10 páginasElectro Fashion Sewable LED Kits WebAndrei VasileAinda não há avaliações
- Gemini Dollar WhitepaperDocumento7 páginasGemini Dollar WhitepaperdazeeeAinda não há avaliações
- Dokumen - Pub - Bobs Refunding Ebook v3 PDFDocumento65 páginasDokumen - Pub - Bobs Refunding Ebook v3 PDFJohn the First100% (3)
- 2021-03 Trophy LagerDocumento11 páginas2021-03 Trophy LagerAderayo OnipedeAinda não há avaliações
- Costbenefit Analysis 2015Documento459 páginasCostbenefit Analysis 2015TRÂM NGUYỄN THỊ BÍCHAinda não há avaliações
- Turn Around Coordinator Job DescriptionDocumento2 páginasTurn Around Coordinator Job DescriptionMikeAinda não há avaliações
- V737 OverheadDocumento50 páginasV737 OverheadnewahAinda não há avaliações
- Talking Art As The Spirit Moves UsDocumento7 páginasTalking Art As The Spirit Moves UsUCLA_SPARCAinda não há avaliações
- A Case Study of Coustomer Satisfaction in Demat Account At: A Summer Training ReportDocumento110 páginasA Case Study of Coustomer Satisfaction in Demat Account At: A Summer Training ReportDeepak SinghalAinda não há avaliações
- Equivalent Fractions Activity PlanDocumento6 páginasEquivalent Fractions Activity Planapi-439333272Ainda não há avaliações
- Mixed Up MonstersDocumento33 páginasMixed Up MonstersjaneAinda não há avaliações
- Fss Presentation Slide GoDocumento13 páginasFss Presentation Slide GoReinoso GreiskaAinda não há avaliações
- Arnold Ventures Letter To Congressional Social Determinants of Health CaucusDocumento7 páginasArnold Ventures Letter To Congressional Social Determinants of Health CaucusArnold VenturesAinda não há avaliações
- Acute Coronary SyndromeDocumento30 páginasAcute Coronary SyndromeEndar EszterAinda não há avaliações
- Task 3 - LPDocumento21 páginasTask 3 - LPTan S YeeAinda não há avaliações
- GT-N7100-Full Schematic PDFDocumento67 páginasGT-N7100-Full Schematic PDFprncha86% (7)
- The Mantel Colonized Nation Somalia 10 PDFDocumento5 páginasThe Mantel Colonized Nation Somalia 10 PDFAhmad AbrahamAinda não há avaliações