Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Bombardier Aerospace 20140716 Business Aircraft Market Forecast - 2014 33Documento43 páginasBombardier Aerospace 20140716 Business Aircraft Market Forecast - 2014 33asbadgAinda não há avaliações
- Flow Through A Circular TubeDocumento8 páginasFlow Through A Circular TubeAnas Iqmal0% (1)
- 2016 Year End: General Aviation Aircraft Shipment ReportDocumento7 páginas2016 Year End: General Aviation Aircraft Shipment ReportasbadgAinda não há avaliações
- As 5045Documento2 páginasAs 5045asbadgAinda não há avaliações
- 2013 Year End: General Aviation Aircraft Shipment ReportDocumento6 páginas2013 Year End: General Aviation Aircraft Shipment ReportasbadgAinda não há avaliações
- 2016 GAMA Databook - ForwebDocumento60 páginas2016 GAMA Databook - ForwebAnton100% (1)
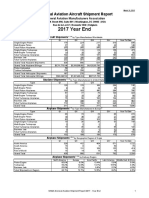
- 2017 Year End: General Aviation Aircraft Shipment ReportDocumento7 páginas2017 Year End: General Aviation Aircraft Shipment ReportasbadgAinda não há avaliações
- C 141 ADocumento2 páginasC 141 AasbadgAinda não há avaliações
- Brochura Legacy 600Documento17 páginasBrochura Legacy 600jtonetiAinda não há avaliações
- 2015 Year End: General Aviation Aircraft Shipment ReportDocumento7 páginas2015 Year End: General Aviation Aircraft Shipment ReportasbadgAinda não há avaliações
- 2018 Year-End Report: General Aviation Aircraft Shipment ReportDocumento7 páginas2018 Year-End Report: General Aviation Aircraft Shipment ReportasbadgAinda não há avaliações
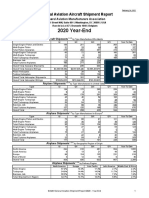
- 2020 Year-End: General Aviation Aircraft Shipment ReportDocumento7 páginas2020 Year-End: General Aviation Aircraft Shipment ReportasbadgAinda não há avaliações
- C 141 FDocumento2 páginasC 141 FasbadgAinda não há avaliações
- 2014 Year End: General Aviation Aircraft Shipment ReportDocumento7 páginas2014 Year End: General Aviation Aircraft Shipment ReportasbadgAinda não há avaliações
- 2017 Year End: General Aviation Aircraft Shipment ReportDocumento7 páginas2017 Year End: General Aviation Aircraft Shipment ReportasbadgAinda não há avaliações
- Gulfstream G550 Specifications SheetDocumento4 páginasGulfstream G550 Specifications Sheetasbadg100% (1)
- S102SDocumento2 páginasS102SasbadgAinda não há avaliações
- S102BDocumento2 páginasS102BasbadgAinda não há avaliações
- G550Performance ENG GS530EDocumento8 páginasG550Performance ENG GS530Easbadg100% (1)
- N 64215Documento1 páginaN 64215asbadgAinda não há avaliações
- Airbus FMCDocumento89 páginasAirbus FMCceparis100% (2)
- E 864Documento2 páginasE 864asbadgAinda não há avaliações
- E 561Documento2 páginasE 561asbadgAinda não há avaliações
- C 5 ADocumento2 páginasC 5 AasbadgAinda não há avaliações
- Airbus FMCDocumento89 páginasAirbus FMCceparis100% (2)
- Gulfstream G550 BrochureV3Documento26 páginasGulfstream G550 BrochureV3RAC1100% (1)
- C 141 CDocumento2 páginasC 141 CasbadgAinda não há avaliações
- C 141 DDocumento2 páginasC 141 DasbadgAinda não há avaliações
- Ah 79100 CDocumento2 páginasAh 79100 CasbadgAinda não há avaliações
- Bacj 1Documento2 páginasBacj 1asbadgAinda não há avaliações
- BacjDocumento2 páginasBacjasbadgAinda não há avaliações
- Europe Merchant Hydrogen Plants 112015Documento3 páginasEurope Merchant Hydrogen Plants 112015totpityiAinda não há avaliações
- 22 Piston Rings e PDFDocumento12 páginas22 Piston Rings e PDFBhumin PatelAinda não há avaliações
- 2017 Winter Question Paper PDFDocumento4 páginas2017 Winter Question Paper PDFJanardan JakhadAinda não há avaliações
- Dynamic Surface Tension - KRÜSS ScientificDocumento4 páginasDynamic Surface Tension - KRÜSS ScientificRamirez FrancisAinda não há avaliações
- Book 2: Chapter 4 - Fluid Flow: Application LimitationsDocumento20 páginasBook 2: Chapter 4 - Fluid Flow: Application LimitationsVaniya GoelAinda não há avaliações
- Daily Air Compressor Inspection ChecklistDocumento1 páginaDaily Air Compressor Inspection Checklistarunjith rAinda não há avaliações
- Airliquide Ec Handbook v1.3Documento96 páginasAirliquide Ec Handbook v1.3John DalkiaAinda não há avaliações
- LPG TanksDocumento48 páginasLPG TanksdlebreromAinda não há avaliações
- SINGLE STAGE AIR COMPRESSOR LabDocumento5 páginasSINGLE STAGE AIR COMPRESSOR LabLetarbor de'GhettoGuyAinda não há avaliações
- Pipes and FittingsDocumento9 páginasPipes and FittingsRaquel MonsalveAinda não há avaliações
- Line Identification Line P&Id Size Pipe No. Line No. (In.) Spec Service (PD-) FromDocumento56 páginasLine Identification Line P&Id Size Pipe No. Line No. (In.) Spec Service (PD-) Fromsamer8saifAinda não há avaliações
- Unit 2 PumpsDocumento11 páginasUnit 2 PumpsThuy TranAinda não há avaliações
- Lecture 2-Hydraulic / PumpDocumento23 páginasLecture 2-Hydraulic / PumpyujAinda não há avaliações
- 9A03501 Thermal Engineering - IIDocumento1 página9A03501 Thermal Engineering - IIsivabharathamurthyAinda não há avaliações
- List F1929 - StocktypeDocumento37 páginasList F1929 - StocktypeRizki HardiansyahAinda não há avaliações
- Combustion Ratio ControlDocumento8 páginasCombustion Ratio ControlMourougapragash SubramanianAinda não há avaliações
- Rising MainDocumento2 páginasRising MainJitesh KumarAinda não há avaliações
- Tutorial: Water Flooding and WAG Application Builder Grid Properties (Field Units)Documento5 páginasTutorial: Water Flooding and WAG Application Builder Grid Properties (Field Units)Erick Morales SánchezAinda não há avaliações
- Assignmnet 2 Solutions 2011Documento4 páginasAssignmnet 2 Solutions 2011nedian_2006Ainda não há avaliações
- RESONANCE ALP Sol P Fluid Mechanics EDocumento6 páginasRESONANCE ALP Sol P Fluid Mechanics EChandrakant Bokade100% (1)
- DOLE Rule 1170 - Unfired Pressure VesselsDocumento16 páginasDOLE Rule 1170 - Unfired Pressure VesselsCrislene CruzAinda não há avaliações
- Laddomat 21 ManualDocumento8 páginasLaddomat 21 ManualAlonso CoradoAinda não há avaliações
- Impulse Tubing InstrumentsDocumento2 páginasImpulse Tubing InstrumentssuhailfarhaanAinda não há avaliações
- Greenhouse Gases and Human Activities: Snc2DDocumento7 páginasGreenhouse Gases and Human Activities: Snc2DdaramdasAinda não há avaliações
- Reporte Examen A Junior Valente Cansino PerezDocumento1 páginaReporte Examen A Junior Valente Cansino PerezCesar Alberto Cansino PerezAinda não há avaliações
- IBU-SMO-DC D002 Barrier Guidelines - Revision 3.1 (2020)Documento51 páginasIBU-SMO-DC D002 Barrier Guidelines - Revision 3.1 (2020)Boedi Syafiq100% (1)
- MAnual de Servicio Bomba CAT 2DXDocumento8 páginasMAnual de Servicio Bomba CAT 2DXKetzadilis Johana PérezAinda não há avaliações
- Abu Dhabi Oil Co., LTD (Japan)Documento3 páginasAbu Dhabi Oil Co., LTD (Japan)Anonymous AdofXEYAgEAinda não há avaliações
- Introduction GmawDocumento6 páginasIntroduction GmawNur' AyuniAinda não há avaliações