Você também pode gostar
- Biblio TexDocumento3 páginasBiblio TexAnonymous IoreTDh7Ainda não há avaliações
- LogDocumento2 páginasLogAnonymous IoreTDh7Ainda não há avaliações
- 00 ReadmeDocumento1 página00 ReadmeAnonymous IoreTDh7Ainda não há avaliações
- Assembled Monolayers of Thiolates On Metals As A FormDocumento3 páginasAssembled Monolayers of Thiolates On Metals As A FormAnonymous IoreTDh7Ainda não há avaliações
- U.S. Navy Fluid Power Theory (English Edition) (Ebook ...Documento3 páginasU.S. Navy Fluid Power Theory (English Edition) (Ebook ...Anonymous IoreTDh7Ainda não há avaliações
- NewDocumento3 páginasNewAnonymous IoreTDh7Ainda não há avaliações
- Latex guide, tutorials and resourcesDocumento4 páginasLatex guide, tutorials and resourcesAnonymous IoreTDh7Ainda não há avaliações
- U.S. Navy Fluid Power Theory (English Edition) (Ebook ...Documento3 páginasU.S. Navy Fluid Power Theory (English Edition) (Ebook ...Anonymous IoreTDh7Ainda não há avaliações
- Get Unlimited Downloads With ADocumento2 páginasGet Unlimited Downloads With AthylamiAinda não há avaliações
- Publisher McGraw-HillDocumento1 páginaPublisher McGraw-HillAnonymous IoreTDh7Ainda não há avaliações
- Introduction To VLSI Circuits and SystemsDocumento1 páginaIntroduction To VLSI Circuits and SystemsAnonymous IoreTDh725% (4)
- Join GhhujDocumento1 páginaJoin GhhujCamille MontenegroAinda não há avaliações
- Kinematics, Dynamics, and Design of Machinery - K.J. WaldronDocumento1 páginaKinematics, Dynamics, and Design of Machinery - K.J. WaldronAnonymous IoreTDh7Ainda não há avaliações
- Resultados de Búsqueda: Por JC Love - 2005Documento3 páginasResultados de Búsqueda: Por JC Love - 2005Anonymous IoreTDh7Ainda não há avaliações
- Get Unlimited Downloads With ADocumento2 páginasGet Unlimited Downloads With AthylamiAinda não há avaliações
- SubscriptionDocumento1 páginaSubscriptionAnonymous IoreTDh7Ainda não há avaliações
- Avr TutorialDocumento111 páginasAvr Tutoriallabirint10100% (7)
- Install Config WinAVRDocumento18 páginasInstall Config WinAVRAnonymous IoreTDh7Ainda não há avaliações
- Tipos de Archivo Compatiblesç PDF, TXT, PS, RTFDocumento1 páginaTipos de Archivo Compatiblesç PDF, TXT, PS, RTFAnonymous IoreTDh7Ainda não há avaliações
- Upload to Scribd AgreementDocumento1 páginaUpload to Scribd AgreementAnonymous IoreTDh7Ainda não há avaliações
- TIP115Documento5 páginasTIP115Anonymous IoreTDh7Ainda não há avaliações
- ASMLNKDocumento87 páginasASMLNKAnonymous IoreTDh7Ainda não há avaliações
- Datasheet Arduino Duemilanove ATMEG328Documento448 páginasDatasheet Arduino Duemilanove ATMEG328Caio LoksAinda não há avaliações
- VHDL Golden Reference GuideDocumento136 páginasVHDL Golden Reference GuidePratik DaveAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Mirror TutorialDocumento4 páginasMirror TutorialKrocodileAinda não há avaliações
- IRICEN Journal Explores Span Arrangements and Foundation DepthsDocumento76 páginasIRICEN Journal Explores Span Arrangements and Foundation Depthsveera_swamy2100% (1)
- Ed 319 Lesson Plan 1 DiversityDocumento12 páginasEd 319 Lesson Plan 1 Diversityapi-340488115Ainda não há avaliações
- Music ArticleDocumento34 páginasMusic ArticleHenry SpencerAinda não há avaliações
- MCQsDocumento17 páginasMCQsbilal100% (1)
- Chonburi PDFDocumento81 páginasChonburi PDFJirasak PonchuaAinda não há avaliações
- MAF151 COMMON TEST 2023NOV - QDocumento4 páginasMAF151 COMMON TEST 2023NOV - QArissa NashaliaAinda não há avaliações
- Sensory Evaluation of Pandesal Bread With Ipil-Ipil: (Leucaena Leucocephala) YOUNG LEAVESDocumento31 páginasSensory Evaluation of Pandesal Bread With Ipil-Ipil: (Leucaena Leucocephala) YOUNG LEAVESprincenicolitteborresAinda não há avaliações
- Tuten SMM Ch10Documento22 páginasTuten SMM Ch10JannatAinda não há avaliações
- Must-Know Korean Love Phrases: Always Wanted To Speak Korean?Documento4 páginasMust-Know Korean Love Phrases: Always Wanted To Speak Korean?FatimaAinda não há avaliações
- 2015UniformEvaluation PaperIII PDFDocumento26 páginas2015UniformEvaluation PaperIII PDFAdayyat M.Ainda não há avaliações
- CampylobacterDocumento2 páginasCampylobactersarguss14Ainda não há avaliações
- Hubble Space Telescope Thermal Blanket Repair Design and ImplementationDocumento13 páginasHubble Space Telescope Thermal Blanket Repair Design and ImplementationhabeebAinda não há avaliações
- Rakshit Bhandari - Byju'sTheLearningAppDocumento15 páginasRakshit Bhandari - Byju'sTheLearningAppRakshit BhandariAinda não há avaliações
- Comments: Sample Report CardDocumento2 páginasComments: Sample Report CardLam Nguyen Truc Lam100% (2)
- Chapter 3 ReviewDocumento12 páginasChapter 3 Reviewapi-3829767100% (1)
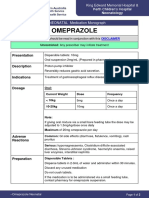
- OmeprazoleDocumento2 páginasOmeprazolephawphawphawAinda não há avaliações
- Worksheet Works Comparative and Superlative Adjectives 2Documento3 páginasWorksheet Works Comparative and Superlative Adjectives 2Bongkotratt CharuchindaAinda não há avaliações
- Kyle Landry Married Life (From Up) Sheet Music (Piano Solo) in F Major - Download & Print - SKU MN0170503Documento1 páginaKyle Landry Married Life (From Up) Sheet Music (Piano Solo) in F Major - Download & Print - SKU MN0170503Filippo TerzaghiAinda não há avaliações
- 1-Academic Text StructuresDocumento53 páginas1-Academic Text StructuresChristine Nivera-PilonAinda não há avaliações
- A Study on Student Budgeting HabitsDocumento41 páginasA Study on Student Budgeting Habitsbornak BonalasAinda não há avaliações
- TLE TVL - Q1 - Answer Key - Housekeeping - Week1-8Documento5 páginasTLE TVL - Q1 - Answer Key - Housekeeping - Week1-8VhernaAveltPiezasAinda não há avaliações
- TERM PAPER of TaxationDocumento25 páginasTERM PAPER of TaxationBobasa S AhmedAinda não há avaliações
- Resume and Leadership Philosophy Jordi Roelfsema - 2020Documento6 páginasResume and Leadership Philosophy Jordi Roelfsema - 2020api-252045591Ainda não há avaliações
- LB3 Diagnostic Test ADocumento4 páginasLB3 Diagnostic Test ALili Lili100% (1)
- Mohamed Abdi KilasDocumento5 páginasMohamed Abdi KilasKilas YareAinda não há avaliações
- Background - Author, Paul The ApostleDocumento9 páginasBackground - Author, Paul The ApostleNard LastimosaAinda não há avaliações
- Raspberry Pi ProjectsDocumento180 páginasRaspberry Pi ProjectsMiluteen95% (20)
- Cattle Thief by Pauline JohnsonDocumento4 páginasCattle Thief by Pauline JohnsonJuma JackAinda não há avaliações
- Institutional Arbitration in IndiaDocumento28 páginasInstitutional Arbitration in IndiaPrasen Gundavaram100% (1)