Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- ASB-410 JQL in Jira Service Desk Slides and NotesDocumento198 páginasASB-410 JQL in Jira Service Desk Slides and NotesCarlos GarciaAinda não há avaliações
- Rounding PDFDocumento1 páginaRounding PDFfajar081Ainda não há avaliações
- Open Set ProofDocumento2 páginasOpen Set Proofsagetbob43Ainda não há avaliações
- StatisticsDocumento56 páginasStatisticsdimeAinda não há avaliações
- Summer Vacation Task HSD-2020-21 Viii & XDocumento5 páginasSummer Vacation Task HSD-2020-21 Viii & XHimansu dasAinda não há avaliações
- Advanced Statistics Course SyllabusDocumento7 páginasAdvanced Statistics Course SyllabusKristina PabloAinda não há avaliações
- AI CLIPS TutorialDocumento30 páginasAI CLIPS Tutorialintonation iAinda não há avaliações
- PPRF Complete Research Report PDFDocumento53 páginasPPRF Complete Research Report PDFGuillermo Bautista FuerteAinda não há avaliações
- Development of The 3rd Generation Balanced Scorecard - ParDocumento11 páginasDevelopment of The 3rd Generation Balanced Scorecard - ParhshafeeqAinda não há avaliações
- Standard Test Methods For Fire Tests of Building Construction and Materials E 119 - 07Documento22 páginasStandard Test Methods For Fire Tests of Building Construction and Materials E 119 - 07Frenzy BritoAinda não há avaliações
- Second Order Hold Based Discretization Method ofDocumento5 páginasSecond Order Hold Based Discretization Method ofvitinrjAinda não há avaliações
- RKB Proper Lubricant Selection For Rolling Bearing Applications PDFDocumento8 páginasRKB Proper Lubricant Selection For Rolling Bearing Applications PDFJako MishyAinda não há avaliações
- Lec 10Documento4 páginasLec 10RKD CinemaAinda não há avaliações
- Descriptive STatistics For Qualitative DataDocumento34 páginasDescriptive STatistics For Qualitative DataMwanjala GasambiAinda não há avaliações
- Similarity - Similar Triangles Part 2Documento3 páginasSimilarity - Similar Triangles Part 2Ara Herrera100% (1)
- Problem Set 3 (Solution)Documento5 páginasProblem Set 3 (Solution)Mark AstigAinda não há avaliações
- GATE 2020 Online Test Series:: Civil EngineeringDocumento6 páginasGATE 2020 Online Test Series:: Civil EngineeringAvinash JhaAinda não há avaliações
- Sample 5th Grade Lesson PlanDocumento2 páginasSample 5th Grade Lesson PlanJune Lee CamarinAinda não há avaliações
- Indian Institute of Technology Kharagpur Department of Mathematics MA11003 - Advanced Calculus Assignment - 1 Autumn 2020Documento1 páginaIndian Institute of Technology Kharagpur Department of Mathematics MA11003 - Advanced Calculus Assignment - 1 Autumn 2020Harsh GuptaAinda não há avaliações
- DynamicsNAVReference50 16pagesDocumento16 páginasDynamicsNAVReference50 16pagesVincent ZahraAinda não há avaliações
- Design of Shear ReinforcementDocumento29 páginasDesign of Shear ReinforcementLuan Truong VanAinda não há avaliações
- Phase Lead and Lag CompensatorDocumento8 páginasPhase Lead and Lag CompensatorNuradeen MagajiAinda não há avaliações
- Study of OscillationDocumento4 páginasStudy of OscillationPHƯỚC DƯƠNG THANHAinda não há avaliações
- Geh 6676 Power System Stabilizer For EX2100 Excitation ControlDocumento48 páginasGeh 6676 Power System Stabilizer For EX2100 Excitation ControlSupolAinda não há avaliações
- Analytical Solution To Transient Heat Conduction in Polar Coordinates With Multiple Layers in Radial DirectionDocumento13 páginasAnalytical Solution To Transient Heat Conduction in Polar Coordinates With Multiple Layers in Radial DirectionGabriel SaavedraAinda não há avaliações
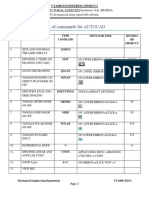
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocumento15 páginasList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelAinda não há avaliações
- Drafting 101Documento4 páginasDrafting 101Airene Abear PascualAinda não há avaliações
- 9709 w10 QP 61Documento4 páginas9709 w10 QP 61Sherman TanAinda não há avaliações