Proceedings of the 2
nd
International Conference on Current Trends in Engineering and Management ICCTEM -2014
17 19, July 2014, Mysore, Karnataka, India
11
USING K-MEANS CLUSTER AND FUZZY C MEANS FOR DEFECT
SEGMENTATION IN FRUITS
VaniAshok
1
, Dr. D.S. Vinod
2
1
(Computer Science & Engineering, Sri Jayachamarajendra College of Engineering, Mysore,
Karnataka, India)
2
(Information Science & Engineering, Sri Jayachamarajendra College of Engineering., Mysore,
Karnataka, India)
ABSTRACT
Quality and safety are the key factors in modern food industries. The quality of fruits and
vegetables is a common combination of characteristics, attributes and properties that have
significance and make for acceptability. One of the most popular applications of computer vision is
to inspect qualities of food products based on form, color and presence of defects. Appearance
factors such as size or dimension, shape, surface texture, surface color, and external or surface
defects define external quality and directly influence consumers in purchasing a product, and they
can be evaluated by means of computer vision techniques. The proposed paper presents defect
segmentation of fruits based on surface color features with unsupervised K-Means clustering and
Fuzzy C-Means algorithms. As the first step, the digital color images of defective apples are pre-
processed using Gaussian low-pass filter (GLPF) smoothing operator to remove noise. The images
are then segmented with the purpose of separating the defects from the edible regions using proposed
clustering algorithms. A comparison analysis is also performed among the two methods.
Keywords: Image segmentation, Clustering, Histogram, Filtering, K-means, Fuzzy C-Means (FCM)
1. INTRODUCTION
Quality and safety are the key factors in modern food industries. Increasing consciousness of
quality, particularly in the food and health sector, strongly demands research activities regarding the
production of defined quality, the preservation of quality during marketing, and thus also the
possibilities of evaluating quality parameters and of integrating this into production processes. The
pallet of possible damage to fruit and vegetables is extremely extensive and is often a criterion of
INTERNATIONAL JOURNAL OF COMPUTER ENGINEERING &
TECHNOLOGY (IJCET)
ISSN 0976 6367(Print)
ISSN 0976 6375(Online)
Volume 5, Issue 9, September (2014), pp. 11-19
IAEME: www.iaeme.com/IJCET.asp
Journal Impact Factor (2014): 8.5328 (Calculated by GISI)
www.jifactor.com
IJCET
I A E M E
Proceedings of the 2
nd
International Conference on Current Trends in Engineering and Management ICCTEM -2014
17 19, July 2014, Mysore, Karnataka, India
12
quality determination methods, for example, malformations, rust fungi, formation of cork, splits,
bitter pit, insect damage, rots, scalds, temperature damage, and glassiness or other physiological
diseases of the storage phase. In addition, there are various risks for injuries during harvest and
transport [1]. With the increasing quality awareness among consumers, the expectation for improved
quality in agricultural and food products has increased the need for enhanced quality monitoring.
There is a need to develop various image analysis techniques to meet the demand of the growing
population. Moreover there is growing demand for automation in food industries due to the fact that
the traditional labor intensive manual inspection processes are inefficient, inaccurate and ineffective.
The application of computer vision in agriculture has increased considerably in recent years due to
the fact that it provides substantial amounts of information about the nature and attributes of the
objects present in a scene.
The use of this technology has spread rapidly in inspecting agri-food commodities, including
meat quality assessment, automated poultry carcass inspection, quality evaluation of fish,
visualization of sugar distribution of melons, measuring ripening of tomatoes, defect detection of
pickling cucumber, and classification of wheat kernels [2]. The computer vision is particularly used
more in automatic inspection of fruits and vegetables, since it is more reliable and objective than
human inspection [3].
Quality assessment of fruits and vegetables is done based on the analysis of external features
like color, size, shape, texture and presence of damage. As consumers are mostly influenced to
choose or reject a particular fruit by its color, it is the most important attribute for assessing the
quality of fruits. The most widely used color spaces in computers and digital images are RGB, HSI
and L*a*b*. In RGB the color of a pixel in image is expressed as three coordinates of primary colors
red, green and blue in a color space. HIS is the color space which is closer to the human perception
of color, like the hue, saturation and intensity. However, RGB and HSI are non-uniform color spaces
and hence uniform color space like L*a*b* is used to implement the proposed algorithms.
The defect segmentation of fruits based on surface color feature can be considered as an
instance of image segmentation where we are segmenting only the defective portion of the fruit.
Image segmentation is the process of partitioning the image into several constituent components. It
partitions the digital image into disjoint (non-overlapping) regions. Segmentation is an essential step
in computer vision and automatic pattern recognition processes based on image analysis of foods as
subsequent extracted data are highly dependent on the accuracy of this operation. Food image
segmentation is still an unsolved problem because of its complex and under constrained attributes
[4].
Image segmentation methods are generally based on one of two fundamental properties of the
intensity values of image pixels: similarity, where the image is partitioned into regions that are
similar according to a set of predefined criteria, and discontinuity, where the image is partitioned
based on sharp changes in intensity values. Based on the discontinuity or similarity criteria, many
segmentation methods have been introduced which can be broadly classified into six categories: (1)
Histogram based method, (2) Edge Detection, (3) Neural Network based segmentation methods, (4)
Physical Model based approach, (5) Region based methods (Region splitting, Region growing and
merging), (6) Clustering (Fuzzy C-means clustering and K-Means clustering) [5]. The unsupervised
clustering algorithms are particularly appropriate for the exploration of interrelationship among the
data points to make an assessment of the structure where there is little a priori information available
about the data [6].
2. RELATED WORKS
Physical appearances of food extremely vary causing difficulties for computer vision
systems. Fruits, in particular, have numerous kinds of defects and highly varying skin color. Hence,
Proceedings of the 2
nd
International Conference on Current Trends in Engineering and Management ICCTEM -2014
17 19, July 2014, Mysore, Karnataka, India
13
they pose even more problems for computer vision-based quality inspection systems. Paul Martinsen
and Peter Schaare [7] have proposed a method for predicting chemical component distribution in
kiwifruit using imaging spectroscopy techniques. The author used partial least- squares method for
data modeling. J Blasco et al. [8] proposed the segmentation procedure, based on a Bayesian
discriminant analysis, to allow fruits to be precisely distinguished from the background. The machine
vision system thus developed detected the external defects of the apples with 86% accuracy. The
feasibility of NIR spectroscopy in combination with powerful multivariate calibration techniques,
such as Partial Least Squares regression (PLS), to measure quality attributes of fruit and vegetables
has been demonstrated by B.M. Nicolai et al. [9]. J. Tan [10] suggested filtering, background
removal, segmentation of fat from muscles, isolation of the LD muscle and segmentation of marbling
from the LD muscle to assess the quality attributes of meat images. K.Vijayarekha [11] discusses the
multivariate image analysis technique applied to the defect segmentation of apple fruit in
multispectral range.
An intensive study on apple quality inspection is carried out by Unay [12]. The apple images
were captured through color/monochrome camera in diffusely illuminated tunnel with two different
light sources (fluorescent tubes and incandescent spots). To improve the image quality a noise
removal operation was performed before applying the image segmentation operation to detect the
defect type. The image intensity and texture based shape features were extracted from each
segmented portion of the image. The performance of several classification methods (Linear
Discriminant Classifier (LDC), k-Nearest Neighbors (k-NN), Fuzzy k-NN, Support Vector Machine
(SVM), Decision Tree and Multi-layer Perceptrons (MLP) were studied for defect segmentation and
detection. They identified bruise, flesh damage, frost damage, hail, hail with perforation, limb rub,
scar tissue, rots, russet and scald defects.
Gabriel Leiva et al. [13] devised methodology to classify blueberries with fungal decay,
shrivelling and mechanical damage using statistical pattern recognition techniques: extracting the
most possible features, selecting the best ones, training the best classification algorithm. The feature
extraction strategies used were Sequential Forward Selection (SFS), with objective functions: Fisher
discriminant, K-Nearest Neighbour (KNN), Linear and Quadratic Discriminant Analysis (LDA and
QDA); and other feature extractors without objective function used were: Forward orthogonal search
algorithm by maximizing the overall dependency, Least Squares Ellipse Fitting (LSEF) and Rank
key features by class separability criteria. With the selected features, decision lines, planes or hyper
planes classifiers were implemented using LDA, QDA, minimal distance, Mahalanobis Distance
(MD), KNN (with 4 to 30 nearest neighbours), Support Vector Machine (SVM) and different Neural
Networks techniques (NN).
Apart from fruit quality assessment researchers are trying to investigate fruit characteristics
that can be used for fruit grading process. V. Leemans et al. [14] have achieved fruit grading is six
steps: image acquisition; ground colour classification; defect segmentation; calyx and stem
recognition; defects characterization and finally the fruit classification into quality classes. They
realized color grading using a simple neural network with no hidden layer, using the three
luminances (red, green and blue) of the considered pixel as input. The calyx and stem ends, which
appear on an image as defects, were detected using a correlation pattern recognition technique and
defect segmentation was done using Gaussian model of the fruit color, measuring the Mahalanobis
distance separating the mean color of the fruit and of each pixel.
Yousef Al Ohali [15] has designed computer mediated date fruit quality assessment and
sorting system. He has used the color intensity distribution in the image as an estimate of flabbiness
of date fruit. Back Propagation Neural Network (BPNN) is used to classify the dates into three
groups, Grade-1: fruits having good shape, high flabbiness, Grade 2: fruits with distorted shape, low
flabbiness and Grade 3: fruits having defects.
Proceedings of the 2
nd
International Conference on Current Trends in Engineering and Management ICCTEM -2014
17 19, July 2014, Mysore, Karnataka, India
14
3. CLUSTERING ALGORITHMS
In this section, the basic sets of definitions are presented to provide the preliminaries of the
clustering methods. First we define the K-means clustering method. The second part discusses about
Fuzzy C- means (FCM) clustering.
3.1 K-Means Clustering Algorithms
K-means method is an unsupervised clustering method that classifies the input data objects
into multiple classes on the basis of their inherent distance from each other [5]. Clustering algorithm
assumes that a vector space is formed from the data features and tries to identify natural clustering in
them. The objects are clustered around the centroids 1 = i
i
..k which are computed by
minimizing the following objective
V =
2
1 S x
j
) (x
i j
i
k
i
=
(1)
Where k is the number of clusters i.e. S
i
, i = 1, 2., k and
i
is the mean point or centroid of all the
points
i j
S x .
The algorithm of an iterative version K-means clustering is as follows:
Step 1. Compute the distribution of the intensity values.
Step 2. Using k random intensities initialize the centroids.
Step 3. Cluster the image points based on the distance of their intensity values from the centroid
intensity values.
) (i
c := arg min
j
2
) (
j
i
x
(2)
Step 4. Compute new centroid for each cluster.
=
=
=
=
=
m
i
i
m
i
i
i
i
j c
x j c
1
) (
1
) (
) (
} { 1
} { 1
: (3)
where k is the number of clusters, i iterates over all the intensity values, j iterates over all the
centroids.
Step 5. Repeat Step 3 and Step 4 until the labels of the cluster do not change any more.
3.2 Fuzzy C-Means Clustering Algorithms
Fuzzy C-means (FCM) is a clustering technique which differs from hard K-means that
employs hard partitioning [16]. The FCM employs fuzzy partitioning such that a data point can
belong to all groups with different membership grades between 0 and 1. FCM is an iterative
algorithm. The aim of FCM is to find cluster centers (centroids) that minimize a dissimilarity
function. To accommodate the introduction of fuzzy partitioning, the membership matrix (U) is
randomly initialized according to,
n j u
c
i
ij
,...., 1 , 1
1
= =
=
(4)
The dissimilarity function used in FCM is given by,
2
1 1 1
2 1
) ,...., , , (
ij
c
i
n
j
m
ij
c
i
i c
d u J c c c U J
= = =
= = (5)
U
ij
is between 0 and 1;
C
ij
is the centroid of cluster i;
Proceedings of the 2
nd
International Conference on Current Trends in Engineering and Management ICCTEM -2014
17 19, July 2014, Mysore, Karnataka, India
15
d
ij
is the Euclidean distance between i
th
centroid(c
i
) and j
th
data point;
m [1,] is a weighting exponent or fuzziness parameter
To reach a minimum of dissimilarity function there are two conditions which are given in
Equation (6) and Equation (7).
=
=
=
n
j
m
ij
j
m
n
j
ij
i
u
x u
c
1
1
(6)
=
c
k
m
kj
ij
ij
d
d
u
1
) 1 /( 2
1
(7)
Precisely speaking, initially the u
ij
and the centers of the clusters are assigned randomly and
the u
ij
is updated in each iteration. The iterative process stops when
p
) 1 ( ) ( ) 1 ( ) (
max
=
s
ij
S
ij
S S
u u U U (8)
The FCM that iteratively updates the cluster centers and the membership grades for each data
point is as follows:
Step 1. Randomly initialize the membership matrix (U) that has constraints as given in Equation (4)
Step 2. Calculate centroids (c
i
) by using Equation (6).
Step 3. Compute dissimilarity between centroids and data points using equation (5). Stop if its
improvement over previous iteration is below a threshold.
Step 4. Compute a new U using Equation (7). If condition given in Equation (8) is False, go to
Step 2.
FCM iteratively moves the cluster centers to the "right" location within a data set.
4. DEFECT SEGMENTATION
In this section, the implementation of K-means and Fuzzy C-means clustering algorithms for
defect segmentation in apple fruits is presented.
4.1 Using K-Means Clustering
Step 1. Read the input image of defective fruit.
Step 2. In order to remove the image noise and reduce detail levels the Gaussian low-pass filter
(GLPF) smoothing operator is applied.
Step 3. Transform the image from RGB to L
*
a
*
b
*
color space as all of the color information is
present in the a
*
and b
*
layers only.
Step 4. Calculate the histograms of the image to decide the number of clusters.
Step 5. Classify colors using K-means clustering in a
*
b
*
space, with Euclidean distance to measure
the distance between two colors.
Proceedings of the 2
nd
International Conference on
Step 6. Label each pixel in the image from the results of K
labeled with its cluster index.
Step 7. Generate different images for each cluster.
4.2 Using Fuzzy C-Means
Step 1. Read the input image of defective fruit.
Step 2. In order to remove the image noise and reduce detail levels the Gaussian low
(GLPF) smoothing operator is applied.
Step 3. Calculate the histograms of the image to decide the number of clusters.
Step 4. Classify pixel intensities using FCM algorithm (initial value of
number of clusters as determined in Step 3.
Step 5. Generate image by allocating different intensity levels for each subclass of the image.
5. EXPERIMENTAL RESULTS
To determine the performance of the clustering approaches, we have considered apples as a
case study. The data set consists of various images of apples with defects such as apple scab, rot and
blotch for the purpose of defect segmentation. Fig. 1
apples from the data set.
(a)
Fig. 1:
Fig. 2, Fig. 3 and Fig. 4 show defect segmentation result
means clustering.
(a) (b)
Fig. 2: K-Means
(a) Filtered Image (b) First Cluster
International Conference on Current Trends in Engineering and Management
17 19, July 2014, Mysore, Karnataka, India
16
Label each pixel in the image from the results of K-means. Every pixel of the image will be
labeled with its cluster index.
Generate different images for each cluster.
ead the input image of defective fruit.
In order to remove the image noise and reduce detail levels the Gaussian low
(GLPF) smoothing operator is applied.
Calculate the histograms of the image to decide the number of clusters.
Classify pixel intensities using FCM algorithm (initial value of m = 2 and
number of clusters as determined in Step 3.
Generate image by allocating different intensity levels for each subclass of the image.
To determine the performance of the clustering approaches, we have considered apples as a
case study. The data set consists of various images of apples with defects such as apple scab, rot and
blotch for the purpose of defect segmentation. Fig. 1 represents some of the images of defective
(b) (c)
Fig. 1: Sample Images from the Dataset
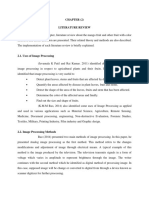
Fig. 2, Fig. 3 and Fig. 4 show defect segmentation results of sample apple fruits using K
(c) (d)
eans Defect Segmentation of an Apple with Scab
(b) First Cluster (c) Second Cluster (d) Third Cluster (e) Histogram
in Engineering and Management ICCTEM -2014
2014, Mysore, Karnataka, India
means. Every pixel of the image will be
In order to remove the image noise and reduce detail levels the Gaussian low-pass filter
= 2 and = 0.01) with
Generate image by allocating different intensity levels for each subclass of the image.
To determine the performance of the clustering approaches, we have considered apples as a
case study. The data set consists of various images of apples with defects such as apple scab, rot and
represents some of the images of defective
of sample apple fruits using K-
(e)
(e) Histogram
Proceedings of the 2
nd
International Conference on
(a) (b)
Fig. 3: K-Means D
(a) Filtered Image (b) First Cluster
(a) (b)
Fig. 4: K-Means Defect Segmentation
(c) Second C
We have segmented the input image into three clusters depending on the data provided by the
histogram shown in Fig. 2(e), Fig. 3(e) and Fig. 4(e). Fig. 2(a), Fig. 3(a) and Fig. 4(a) show the
preprocessed image filtered by Gaussian low
different clusters second cluster correctly segments the defective portion of the image whereas the
first cluster demonstrates the non-defect
Fig. 5, Fig. 6 and Fig. 7 illustrate the resultant images ob
(a)
Fig. 5: Fuzzy C-Means Defect Segmentation
(a)
Fig. 6: Fuzzy C-Means Defect Segmentation
(a) Filtered Image (b) FCM Processed Image
International Conference on Current Trends in Engineering and Management
17 19, July 2014, Mysore, Karnataka, India
17
(c) (d)
Defect Segmentation of an Apple with Blotch
Filtered Image (b) First Cluster (c) Second Cluster (d) Third Cluster (e) Histogram
(b) (c) (d)
egmentation of a Rotten Apple (a) Filtered Image (b) First Cluster
Cluster (d) Third cluster (e) Histogram
We have segmented the input image into three clusters depending on the data provided by the
histogram shown in Fig. 2(e), Fig. 3(e) and Fig. 4(e). Fig. 2(a), Fig. 3(a) and Fig. 4(a) show the
preprocessed image filtered by Gaussian low-pass filter smoothing operator. Among the images in
different clusters second cluster correctly segments the defective portion of the image whereas the
defective part of the fruit.
Fig. 5, Fig. 6 and Fig. 7 illustrate the resultant images obtained from FCM.
(a) (b)
Means Defect Segmentation of an Apple with Scab (a) Filtered Image (b) FCM
Processed Image
(b)
Means Defect Segmentation of an Apple with Blotch
Filtered Image (b) FCM Processed Image
0
100
200
300
400
500
600
0 50
in Engineering and Management ICCTEM -2014
2014, Mysore, Karnataka, India
(e)
(e) Histogram
(e)
Filtered Image (b) First Cluster
We have segmented the input image into three clusters depending on the data provided by the
histogram shown in Fig. 2(e), Fig. 3(e) and Fig. 4(e). Fig. 2(a), Fig. 3(a) and Fig. 4(a) show the
operator. Among the images in
different clusters second cluster correctly segments the defective portion of the image whereas the
Filtered Image (b) FCM
of an Apple with Blotch
100 150 200 250
Proceedings of the 2
nd
International Conference on Current Trends in Engineering and Management ICCTEM -2014
17 19, July 2014, Mysore, Karnataka, India
18
(a) (b)
Fig. 7: Fuzzy C-Means Defect Segmentation of a Rotten Apple
(a) Filtered Image (b) FCM Processed Image
The filtered images are shown in Fig. 5(a), Fig. 6(a) and Fig. 7(a). The FCM segmented
images with three clusters are shown in Fig. 5(b), Fig. 6(b) and Fig. 7(b). The amount of defect in a
given sample using K-Means and FCM clustering is tabulated in Table 1. FCM, being unsupervised
fuzzy clustering algorithm, is motivated by the need to find interesting patterns or groupings in a
given set of data. The cluster allocation in FCM is based on the high membership value and less on
distance.
Table 1: Amount of Defect in Selected Fruit Samples
SI.
No.
Data
Sample
K-Means FCM
1 Figure 1(a) 60% 52%
2 Figure 1(b) 44% 40%
3 Figure 1(c) 10% 9%
6. CONCLUSION
The automated inspection of agricultural products, fruits in particular, is an important process
as it reduces human interaction with the inspected goods, classify generally faster than humans and
tend to be more consistent in classification. The segmentation of defects in fruits is proposed and
evaluated in this paper. The proposed approach used K-Means clustering and Fuzzy C-Means
clustering to segment defects in apple images. Experimental results suggest that the algorithms are
able to segment the defects more accurately. The major drawback of K-Means is that, there may be a
skewed clustering result if the cluster number estimate is incorrect. It is overcome to certain extent in
the proposed method by determining the number of clusters using the histogram of the image. The
image is also pre-processed to remove noise.
7. REFERENCES
1. Peter Butz, Claudia Hofmann, Bernhard Tauscher, Recent Developments in Noninvasive
Techniques for Fresh Fruit and Vegetable Internal Quality Analysis, Journal Of Food Science,
Vol. 70, Nr. 9, 2005.
2. Sun, D.-W, Hyperspectral imaging for food quality:A non-destructive tool for food quality and
safety evaluation and inspectio, London: Academic, 2010.
3. Sergio Cubero, Nuria Aleixos, Enrique Molt, Juan Gmez-Sanchis, Jose Blasco, Advances
in Machine Vision Applications for Automatic Inspection and Quality Evaluation of Fruits and
Vegetables, Food Bioprocess Technol 4: 2011, 487504.
4. Domingo Mery, Franco Pedreschi, Segmentation of colour food images using a robust
algorithm, Journal of Food Engineering 66, 2005, 353360.
Proceedings of the 2
nd
International Conference on Current Trends in Engineering and Management ICCTEM -2014
17 19, July 2014, Mysore, Karnataka, India
19
5. Shiv Ram Dubey, Pushkar Dixit, Nishant Singh, Jay Prakash Gupta, Infected Fruit Part
Detection using K-Means Clustering Segmentation Technique, International Journal of
Artificial Intelligence and Interactive Multimedia, 2013, Vol. 2, No.2.
6. Jaskirat Kaur, Sunil Agarwal, Venu Vig, Performance analysis of clustering based image
segmentation and optimization methods, CS&IT-CSCP, 2012, 245-254.
7. Paul Martinsen, Peter Schaare, Measuring soluble solids distribution in kiwifruit using near-
infrared imaging spectroscopy, Postharvest Biology and Technology 14014, 1998, 271281.
8. J. Blasco, N. Aleixos, E. Molto, Machine Vision System for Automatic Quality Grading of
Fruit, Biosystems Engineering, 2003, 85 (4), 415423.
9. Bart M. Nicolai, Katrien Beullens, Els Bobelyn, Ann Peirs, Wouter Saeys, Karen I. Theron,
Jeroen Lammertyna, Nondestructive measurement of fruit and vegetable quality by means of
NIR spectroscopy: A review, Postharvest Biology and Technology, 46, 2007, 99118.
10. J. Tan, Meat quality evaluation by computer vision, Journal of Food Engineering 61, 2004,
2735.
11. K. Vijayarekha, Multivariate image analysis for defect identificationof apple fruit images,
IEEE Transactions, 2008.
12. Unay, Dervim, Multispectral Image Processing and Pattern Recognition Techniques for
Quality Inspection of Apple Fruit, Ph.D. Thesis, 2006, Faculte Polytechnique de Mons,
Belgium.
13. Gabriel Leivaa, Germn Mondragnb, Domingo Meryb, Jos Miguel Aguilera, The automatic
sorting using image processing improves postharvest blueberriesstorage quality, 2011, ICEF.
14. V. Leemans, H. Mageinb, M.-F. Destain, On-line Fruit Grading according to their External
Quality using Machine Vision, Biosystems Engineering, 2002, 83 (4), 397404.
15. Yousef Al Ohali, Computer vision based date fruit grading system: Designand
implementation, Journal of King Saud University Computer and Information Sciences, 2011,
23, 2936.
16. Ebrahim Aghajari, Gharpure Damayanti, Incorporating FCM and Back Propagation Neural
Network for Image Segmentation, International Journal of Computer & communication
Technology, 2011, Volume-2, Issue-VIII.
Você também pode gostar
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocumento8 páginasDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- Fruit Quality Evaluation Using Machine Learning Techniques - Review, Motivation and Future PerspectivesDocumento23 páginasFruit Quality Evaluation Using Machine Learning Techniques - Review, Motivation and Future PerspectivesDang VHAinda não há avaliações
- CV Agriculture 2010Documento12 páginasCV Agriculture 2010Thuy NguyenAinda não há avaliações
- Advances in Machine Vision Applications For Automatic Inspection and Quality Evaluation of Fruits and VegetablesDocumento18 páginasAdvances in Machine Vision Applications For Automatic Inspection and Quality Evaluation of Fruits and VegetablesEdgar RoaAinda não há avaliações
- Review of Fruit Grading SystemDocumento10 páginasReview of Fruit Grading SystemTanya WilkersonAinda não há avaliações
- 4 Ijcsetiraug20184Documento8 páginas4 Ijcsetiraug20184TJPRC PublicationsAinda não há avaliações
- Deep Learning Based Fruit Quality InspectionDocumento7 páginasDeep Learning Based Fruit Quality InspectionIJRASETPublicationsAinda não há avaliações
- Fruit Recognition Using Color and Texture Features PDFDocumento5 páginasFruit Recognition Using Color and Texture Features PDFKharisma Pe'AkAinda não há avaliações
- A Study On Image Based Techniques For Fruits and MeatDocumento6 páginasA Study On Image Based Techniques For Fruits and MeatIJIRSTAinda não há avaliações
- A Review On Quality Scanner Device For Radish and Carrot Using Image Processing TechniqueDocumento9 páginasA Review On Quality Scanner Device For Radish and Carrot Using Image Processing TechniqueIJRASETPublicationsAinda não há avaliações
- Evaluation Performance of Ultrasonic Testing On FRDocumento7 páginasEvaluation Performance of Ultrasonic Testing On FRAlif PratamaAinda não há avaliações
- Fruit Classification System Using Computer Vision: A ReviewDocumento5 páginasFruit Classification System Using Computer Vision: A ReviewSmitha MlAinda não há avaliações
- ANN Based Technique For Vegetable Quality DetectionDocumento9 páginasANN Based Technique For Vegetable Quality DetectionIOSRjournalAinda não há avaliações
- Revisão: Visão Computacional Aplicada À Inspeção e Ao Controle Da Qualidade de Frutas e VerdurasDocumento19 páginasRevisão: Visão Computacional Aplicada À Inspeção e Ao Controle Da Qualidade de Frutas e VerdurasMichael Pmforever SpAinda não há avaliações
- Inteligencia ArtificialDocumento19 páginasInteligencia ArtificialSebastián Vallejo RangelAinda não há avaliações
- (IJCST-V10I3P28) :ashique Sherief, Muhammed Fayas, Adol Antony George, Adish H, Shyni ShajahanDocumento5 páginas(IJCST-V10I3P28) :ashique Sherief, Muhammed Fayas, Adol Antony George, Adish H, Shyni ShajahanEighthSenseGroupAinda não há avaliações
- Identification of Defects in Fruits UsinDocumento4 páginasIdentification of Defects in Fruits UsinMedcezir BölümlerAinda não há avaliações
- Smart Agricultural Improvement Using Digital Image ProcessingDocumento6 páginasSmart Agricultural Improvement Using Digital Image ProcessingIJRASETPublicationsAinda não há avaliações
- Computer Aided Inspection System For Food Products Using Machine Vision - A ReviewDocumento5 páginasComputer Aided Inspection System For Food Products Using Machine Vision - A ReviewMekaTronAinda não há avaliações
- Plant Disease Detection and Solution SystemDocumento6 páginasPlant Disease Detection and Solution SystemIJRASETPublicationsAinda não há avaliações
- Disease Detection in Plant Using Artificial Neural NetworkDocumento6 páginasDisease Detection in Plant Using Artificial Neural NetworkAwab abu bakarAinda não há avaliações
- Artificial Intelligence Approach For Tomato Detection and Mass Estimation in Precision AgricultureDocumento15 páginasArtificial Intelligence Approach For Tomato Detection and Mass Estimation in Precision AgricultureDr. S. G. ShivaPrasad YadavAinda não há avaliações
- Chapter (2) Literature ReviewDocumento8 páginasChapter (2) Literature ReviewKyaw SoeAinda não há avaliações
- An Optimized Method For Segmentation and Classification of Apple Diseases Based On Strong Correlation and Genetic Algorithm Based Feature SelectionDocumento17 páginasAn Optimized Method For Segmentation and Classification of Apple Diseases Based On Strong Correlation and Genetic Algorithm Based Feature SelectionhibaAinda não há avaliações
- AI-Based Crop Disease and Yield PredictionDocumento8 páginasAI-Based Crop Disease and Yield PredictionSantoshAinda não há avaliações
- 784-Article Text-1210-1-10-20191012Documento13 páginas784-Article Text-1210-1-10-20191012hamache imeneAinda não há avaliações
- Classification of Fruits and Detection of Disease Using CNNDocumento8 páginasClassification of Fruits and Detection of Disease Using CNNRishabh NabarAinda não há avaliações
- Academic Activity Report on Image Processing TechniquesDocumento14 páginasAcademic Activity Report on Image Processing TechniquesMahabubur RahmanAinda não há avaliações
- Pestron For Quality Monitoring of Custard ApplesDocumento8 páginasPestron For Quality Monitoring of Custard ApplessvijayachitraAinda não há avaliações
- Automated System For Detection of Apple Purity and Its GradingDocumento4 páginasAutomated System For Detection of Apple Purity and Its GradingRahul SharmaAinda não há avaliações
- Application of Computer Vision Technique On Sorting and Grading of Fruits and Vegetables 2157 7110.S1 001Documento7 páginasApplication of Computer Vision Technique On Sorting and Grading of Fruits and Vegetables 2157 7110.S1 001farha19Ainda não há avaliações
- Iraji 2018Documento15 páginasIraji 2018Jose LuisAinda não há avaliações
- Prospects of Computer Vision Automated Grading and Sorting Systems in Agricultural and Food Products For Quality EvaluationDocumento9 páginasProspects of Computer Vision Automated Grading and Sorting Systems in Agricultural and Food Products For Quality EvaluationshaheerAinda não há avaliações
- Crop Disease DetectionDocumento19 páginasCrop Disease DetectionBscam WastedAinda não há avaliações
- JETIRFT06024Documento5 páginasJETIRFT06024Ali GondalAinda não há avaliações
- Fruit Freshness Classification AnalysisDocumento4 páginasFruit Freshness Classification AnalysisGermano de JesusAinda não há avaliações
- Weed Detection in Agricultural FieldsDocumento7 páginasWeed Detection in Agricultural FieldsIJRASETPublicationsAinda não há avaliações
- Applications of Image Processing For Grading Agriculture ProductsDocumento9 páginasApplications of Image Processing For Grading Agriculture ProductsThái Trần DanhAinda não há avaliações
- Leaf Disease Detection SystemDocumento12 páginasLeaf Disease Detection SystemIJRASETPublicationsAinda não há avaliações
- Immature Green Citrus Fruit Detection and Counting Based On Fast Normalized Cross Correlation (FNCC) Using Natural Outdoor Colour ImagesDocumento20 páginasImmature Green Citrus Fruit Detection and Counting Based On Fast Normalized Cross Correlation (FNCC) Using Natural Outdoor Colour ImagesRanjani VasuAinda não há avaliações
- EAgrobot - Plant Disease Detection and Precision Spraying Robot Using Image ProcessingDocumento7 páginasEAgrobot - Plant Disease Detection and Precision Spraying Robot Using Image ProcessingIJRASETPublicationsAinda não há avaliações
- Vegetable Grading and Sorting Using Artificial IntelligenceDocumento11 páginasVegetable Grading and Sorting Using Artificial IntelligenceIJRASETPublicationsAinda não há avaliações
- Application of Image Processing in AgricultureDocumento10 páginasApplication of Image Processing in AgricultureDamini Jitendra KhachaneAinda não há avaliações
- Soybean Leaf Disease DetectionDocumento7 páginasSoybean Leaf Disease DetectionIJRASETPublicationsAinda não há avaliações
- JETIR2105829Documento4 páginasJETIR2105829kshirodiitkgpAinda não há avaliações
- Plant Health Monitoring Using Digital Image ProcessingDocumento5 páginasPlant Health Monitoring Using Digital Image ProcessingSwapnil GedamAinda não há avaliações
- Simple Vision System For Apple Varieties ClassificationDocumento13 páginasSimple Vision System For Apple Varieties ClassificationFarhan AlhadadAinda não há avaliações
- Internal Quality Classification of Agricultural Produce Using Non-Destructive Image Processing Technologies (Soft X-Ray)Documento9 páginasInternal Quality Classification of Agricultural Produce Using Non-Destructive Image Processing Technologies (Soft X-Ray)Shankar Ashok GawareAinda não há avaliações
- Plant Species Identification Using Computer Vision Techniques A Systematic Literature Review SpringerLink PDFDocumento1 páginaPlant Species Identification Using Computer Vision Techniques A Systematic Literature Review SpringerLink PDFsssaAinda não há avaliações
- A Review On Leaf Disease Detection Using Different ApproachesDocumento6 páginasA Review On Leaf Disease Detection Using Different ApproachesIJRASETPublicationsAinda não há avaliações
- Foods 11 03483 v2Documento11 páginasFoods 11 03483 v2yohoho97531Ainda não há avaliações
- Computer vision for quality inspection of agricultural and food productsDocumento23 páginasComputer vision for quality inspection of agricultural and food productsMohana KurubaAinda não há avaliações
- Survey Detection of Crop Diseases Using Multiscaling TechniqueDocumento3 páginasSurvey Detection of Crop Diseases Using Multiscaling TechniqueEditor IJRITCCAinda não há avaliações
- A Neural Network Assisted Machine Vision System For Sorting Pomegranate FruitsDocumento9 páginasA Neural Network Assisted Machine Vision System For Sorting Pomegranate FruitsvidulaAinda não há avaliações
- Review On Identification and Classification of Grains Using Image ProcessingDocumento4 páginasReview On Identification and Classification of Grains Using Image ProcessingPallavi PatilAinda não há avaliações
- Royetal - NCAA 2022 1Documento27 páginasRoyetal - NCAA 2022 1RUEL ALEJANDROAinda não há avaliações
- Classification of Segmented Image Using Increased Global Contrast For Paddy Plant DiseaseDocumento1 páginaClassification of Segmented Image Using Increased Global Contrast For Paddy Plant DiseaseEditor IjietAinda não há avaliações
- Automatic Fruit Image Recognition System Based On Shape and Color FeaturesDocumento2 páginasAutomatic Fruit Image Recognition System Based On Shape and Color FeaturesakshayAinda não há avaliações
- Food Control System Assessment Tool: Dimension D – Science/Knowledge Base and Continuous ImprovementNo EverandFood Control System Assessment Tool: Dimension D – Science/Knowledge Base and Continuous ImprovementAinda não há avaliações
- Biomedical Texture Analysis: Fundamentals, Tools and ChallengesNo EverandBiomedical Texture Analysis: Fundamentals, Tools and ChallengesAdrien DepeursingeAinda não há avaliações
- A Study On The Reasons For Transgender To Become EntrepreneursDocumento7 páginasA Study On The Reasons For Transgender To Become EntrepreneursIAEME PublicationAinda não há avaliações
- Determinants Affecting The User's Intention To Use Mobile Banking ApplicationsDocumento8 páginasDeterminants Affecting The User's Intention To Use Mobile Banking ApplicationsIAEME PublicationAinda não há avaliações
- Visualising Aging Parents & Their Close Carers Life Journey in Aging EconomyDocumento4 páginasVisualising Aging Parents & Their Close Carers Life Journey in Aging EconomyIAEME PublicationAinda não há avaliações
- Influence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiDocumento16 páginasInfluence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiIAEME PublicationAinda não há avaliações
- Modeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyDocumento14 páginasModeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyIAEME PublicationAinda não há avaliações
- A Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiDocumento16 páginasA Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiIAEME PublicationAinda não há avaliações
- Impact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesDocumento10 páginasImpact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesIAEME PublicationAinda não há avaliações
- Analyse The User Predilection On Gpay and Phonepe For Digital TransactionsDocumento7 páginasAnalyse The User Predilection On Gpay and Phonepe For Digital TransactionsIAEME PublicationAinda não há avaliações
- Broad Unexposed Skills of Transgender EntrepreneursDocumento8 páginasBroad Unexposed Skills of Transgender EntrepreneursIAEME PublicationAinda não há avaliações
- Voice Based Atm For Visually Impaired Using ArduinoDocumento7 páginasVoice Based Atm For Visually Impaired Using ArduinoIAEME PublicationAinda não há avaliações
- A Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurDocumento7 páginasA Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurIAEME PublicationAinda não há avaliações
- Gandhi On Non-Violent PoliceDocumento8 páginasGandhi On Non-Violent PoliceIAEME PublicationAinda não há avaliações
- Attrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesDocumento15 páginasAttrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesIAEME PublicationAinda não há avaliações
- A Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaDocumento9 páginasA Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaIAEME PublicationAinda não há avaliações
- A Multiple - Channel Queuing Models On Fuzzy EnvironmentDocumento13 páginasA Multiple - Channel Queuing Models On Fuzzy EnvironmentIAEME PublicationAinda não há avaliações
- EXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESDocumento9 páginasEXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESIAEME PublicationAinda não há avaliações
- Various Fuzzy Numbers and Their Various Ranking ApproachesDocumento10 páginasVarious Fuzzy Numbers and Their Various Ranking ApproachesIAEME PublicationAinda não há avaliações
- Role of Social Entrepreneurship in Rural Development of India - Problems and ChallengesDocumento18 páginasRole of Social Entrepreneurship in Rural Development of India - Problems and ChallengesIAEME PublicationAinda não há avaliações
- Application of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDDocumento19 páginasApplication of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDIAEME PublicationAinda não há avaliações
- Optimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsDocumento13 páginasOptimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsIAEME PublicationAinda não há avaliações
- Knowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentDocumento8 páginasKnowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentIAEME PublicationAinda não há avaliações
- A Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksDocumento10 páginasA Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksIAEME PublicationAinda não há avaliações
- Quality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceDocumento7 páginasQuality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceIAEME PublicationAinda não há avaliações
- Dealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsDocumento8 páginasDealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsIAEME PublicationAinda não há avaliações
- Financial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelDocumento9 páginasFinancial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelIAEME PublicationAinda não há avaliações
- Analysis On Machine Cell Recognition and Detaching From Neural SystemsDocumento9 páginasAnalysis On Machine Cell Recognition and Detaching From Neural SystemsIAEME PublicationAinda não há avaliações
- Analysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsDocumento13 páginasAnalysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsIAEME PublicationAinda não há avaliações
- Moderating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorDocumento7 páginasModerating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorIAEME PublicationAinda não há avaliações
- Prediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsDocumento13 páginasPrediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsIAEME PublicationAinda não há avaliações
- A Review of Particle Swarm Optimization (Pso) AlgorithmDocumento26 páginasA Review of Particle Swarm Optimization (Pso) AlgorithmIAEME PublicationAinda não há avaliações
- Basic Facts For Homebooks Stage 7Documento3 páginasBasic Facts For Homebooks Stage 7api-311857762Ainda não há avaliações
- 10 ExtSpringsDocumento27 páginas10 ExtSpringsresh27Ainda não há avaliações
- Forensic Pharmacy: Dr. Zirwa AsimDocumento35 páginasForensic Pharmacy: Dr. Zirwa AsimZirwa AsimAinda não há avaliações
- TM-1870 AVEVA Everything3D - (2.1) Draw Administration (CN)Documento124 páginasTM-1870 AVEVA Everything3D - (2.1) Draw Administration (CN)yuehui niuAinda não há avaliações
- INJSO Answer Key & SolutionDocumento5 páginasINJSO Answer Key & SolutionYatish Goyal100% (1)
- Tes P 119 10 R0 PDFDocumento43 páginasTes P 119 10 R0 PDFAbin Meetu100% (4)
- Bicycle Repair ManualDocumento162 páginasBicycle Repair Manualrazvancc89% (9)
- American With Disabilities Act AdaDocumento16 páginasAmerican With Disabilities Act Adaapi-376186426Ainda não há avaliações
- Computer Vision: Chapter 5. SegmentationDocumento16 páginasComputer Vision: Chapter 5. SegmentationThịi ÁnhhAinda não há avaliações
- +GF+ Pressure Retaining Valve Type 586Documento4 páginas+GF+ Pressure Retaining Valve Type 586ROMNAAinda não há avaliações
- Eccsa Five Year (2014 15 - 2018 19) Strategic PlanDocumento95 páginasEccsa Five Year (2014 15 - 2018 19) Strategic Planyayehyirad100% (1)
- Introducing The Phenomenon To Be Discussed: Stating Your OpinionDocumento8 páginasIntroducing The Phenomenon To Be Discussed: Stating Your OpinionRam RaghuwanshiAinda não há avaliações
- Hardware Devices Used in Virtual Reality TechnologiesDocumento6 páginasHardware Devices Used in Virtual Reality TechnologiesTheMoon LightAinda não há avaliações
- CH - 1Documento4 páginasCH - 1Phantom GamingAinda não há avaliações
- ZXJ 10 SPCDocumento7 páginasZXJ 10 SPCMuhammad Yaseen100% (1)
- Journal of Travel & Tourism MarketingDocumento19 páginasJournal of Travel & Tourism MarketingSilky GaurAinda não há avaliações
- Frame Fit Specs SramDocumento22 páginasFrame Fit Specs SramJanekAinda não há avaliações
- Audi A3 Injeção DiretaDocumento109 páginasAudi A3 Injeção Diretawesley candido100% (1)
- A Comparative Study of Different Image Denoising Methods: Afreen Mulla, A.G.Patil, Sneha Pethkar, Nishigandha DeshmukhDocumento6 páginasA Comparative Study of Different Image Denoising Methods: Afreen Mulla, A.G.Patil, Sneha Pethkar, Nishigandha DeshmukherpublicationAinda não há avaliações
- Computers and Operations Research: Yulin Sun, Simon Cong Guo, Xueping LiDocumento12 páginasComputers and Operations Research: Yulin Sun, Simon Cong Guo, Xueping LiQuỳnh NguyễnAinda não há avaliações
- Sample of Application Letter (Updated)Documento4 páginasSample of Application Letter (Updated)Mizpah Sarah BautistaAinda não há avaliações
- Anie Altamirano Learning For Life HandoutDocumento4 páginasAnie Altamirano Learning For Life HandoutAnnapurna VAinda não há avaliações
- Soft Computing Techniques Assignment1 PDFDocumento14 páginasSoft Computing Techniques Assignment1 PDFshadan alamAinda não há avaliações
- Manhattan Project SummaryDocumento5 páginasManhattan Project Summaryapi-302406762Ainda não há avaliações
- FMBXXX Quick Manual v3.5Documento18 páginasFMBXXX Quick Manual v3.5AMAinda não há avaliações
- Innovations in Drill Stem Safety Valve TechnologyDocumento22 páginasInnovations in Drill Stem Safety Valve Technologymiguel mendoza0% (1)
- MN00119 Unicom LT User ManualDocumento45 páginasMN00119 Unicom LT User ManualPhilipp A IslaAinda não há avaliações
- CitationCJ4-CB Checklists B v1.2Documento4 páginasCitationCJ4-CB Checklists B v1.2Joao Vitor RojasAinda não há avaliações
- PC 5400 PC 5500Documento53 páginasPC 5400 PC 5500ArturHeiseAinda não há avaliações
- Aw MD700 Manual G10 150706Documento73 páginasAw MD700 Manual G10 150706Heraldo Ulguim Luis OliveiraAinda não há avaliações