Você também pode gostar
- Chevy Differentials: How to Rebuild the 10- and 12-BoltNo EverandChevy Differentials: How to Rebuild the 10- and 12-BoltNota: 5 de 5 estrelas5/5 (8)
- Bearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsNo EverandBearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsNota: 4 de 5 estrelas4/5 (1)
- Mill Spindle Advanced Gear Design: William R. HerbstrittDocumento5 páginasMill Spindle Advanced Gear Design: William R. HerbstrittTRUNG QUOC LEAinda não há avaliações
- Bini 1Documento64 páginasBini 1Mikias TewachewAinda não há avaliações
- Report On GearDocumento18 páginasReport On GearShubham KhannaAinda não há avaliações
- Book - Gears - IndiaDocumento12 páginasBook - Gears - IndiadesetekAinda não há avaliações
- Four Wheeler Multi Nut Wheel ChangerDocumento6 páginasFour Wheeler Multi Nut Wheel ChangerDharumanAinda não há avaliações
- Mech - Ijmperd-Design and Finite Element-Nihad Hasan TalibDocumento12 páginasMech - Ijmperd-Design and Finite Element-Nihad Hasan TalibTJPRC PublicationsAinda não há avaliações
- Profile Shift of Involute Gears - Tec-ScienceDocumento17 páginasProfile Shift of Involute Gears - Tec-ScienceManoj SinghAinda não há avaliações
- Baja Design ReportDocumento9 páginasBaja Design ReportRishi KumarAinda não há avaliações
- Automated Modelling of Spur Gears and Worm Gears Using ABAQUS/CAEDocumento20 páginasAutomated Modelling of Spur Gears and Worm Gears Using ABAQUS/CAEGanesh KCAinda não há avaliações
- Baja Design Report PDFDocumento9 páginasBaja Design Report PDFZubair HussainAinda não há avaliações
- SynchromeshDocumento7 páginasSynchromeshZein ElserfyAinda não há avaliações
- Synchromesh MechanismDocumento7 páginasSynchromesh MechanismZein ElserfyAinda não há avaliações
- Gear Box Design ReportDocumento12 páginasGear Box Design ReportKhalil Raza93% (29)
- Kassahun Tadess GeerboxDocumento16 páginasKassahun Tadess Geerboxabubekery61Ainda não há avaliações
- Final ReportDocumento45 páginasFinal ReportKuppu Raj100% (1)
- Geneva Wheel PresentationDocumento14 páginasGeneva Wheel PresentationHimanshuDixit0% (1)
- Double Cone Synchronizer For Vehicle TransmissionDocumento17 páginasDouble Cone Synchronizer For Vehicle TransmissionMujammil Choudhari50% (2)
- He So Dich Chinh-Profile-ShiftDocumento5 páginasHe So Dich Chinh-Profile-ShiftGrey MouseAinda não há avaliações
- Influence of Gear Geometry On Gearbox Noise Reduction - An Experimental InvestigationDocumento7 páginasInfluence of Gear Geometry On Gearbox Noise Reduction - An Experimental InvestigationsamanaveenAinda não há avaliações
- Simultaneous Inspection and Correction of Gears in ProductionDocumento9 páginasSimultaneous Inspection and Correction of Gears in ProductionsamanaveenAinda não há avaliações
- Paper Information: Next Paper Previous Paper Paper SubmissionDocumento10 páginasPaper Information: Next Paper Previous Paper Paper SubmissionMeleseAinda não há avaliações
- Complex Engineering ProblemDocumento21 páginasComplex Engineering ProblemMuhammed Afnan100% (1)
- Harmonic DriveDocumento52 páginasHarmonic DriveRahul TanwarAinda não há avaliações
- Fig.1.23 The Generation of Involute Profile On Right Side Fig.1.24 The Generation of Involute Profile On Left SideDocumento12 páginasFig.1.23 The Generation of Involute Profile On Right Side Fig.1.24 The Generation of Involute Profile On Left SideBalvinderAinda não há avaliações
- Baja Design ReportDocumento9 páginasBaja Design ReportAkhilAinda não há avaliações
- Optimization Design of Helical Cylinder Gear ReducerDocumento8 páginasOptimization Design of Helical Cylinder Gear ReducerNima FouladinejadAinda não há avaliações
- Introduction To Direct Gear DesignDocumento15 páginasIntroduction To Direct Gear DesignburaktuncerAinda não há avaliações
- Gearboxes ClassificationDocumento4 páginasGearboxes ClassificationMerlusca Gabriel Alexandru100% (1)
- Itr PresentationDocumento44 páginasItr PresentationAditya ShahAinda não há avaliações
- Ijmet 07 06 050Documento8 páginasIjmet 07 06 050dfdhAinda não há avaliações
- Gear DesignDocumento10 páginasGear DesignDragoș Gabriel Hrihor100% (2)
- Cylindrical Gear Conversions - AGMA To ISO - Gear Solutions Magazine Your Resource To The Gear IndustryDocumento11 páginasCylindrical Gear Conversions - AGMA To ISO - Gear Solutions Magazine Your Resource To The Gear Industrymahaprabhu78Ainda não há avaliações
- Bevel GearDocumento13 páginasBevel GearADII 2701Ainda não há avaliações
- Synopsis-Wheel HubDocumento4 páginasSynopsis-Wheel Hubrock starAinda não há avaliações
- A Crowning Achievement For Automotive ApplicationsDocumento10 páginasA Crowning Achievement For Automotive ApplicationsCan CemreAinda não há avaliações
- Design Basic of Industrial Gear BoxesDocumento84 páginasDesign Basic of Industrial Gear Boxesalfatih1407497100% (2)
- Shock Absorber Test RigDocumento14 páginasShock Absorber Test RigOmKar GunjalAinda não há avaliações
- Gear Design Engineering Tools Data KnowledgeDocumento4 páginasGear Design Engineering Tools Data KnowledgeKeith AdminAinda não há avaliações
- An Attempt at Complete Assembly Contact Analysis of A High Precision Reduction GearDocumento11 páginasAn Attempt at Complete Assembly Contact Analysis of A High Precision Reduction GearvijaykumarnAinda não há avaliações
- Helical Gears: DefinitionDocumento29 páginasHelical Gears: DefinitionMuthuvel MAinda não há avaliações
- Design and Execution of Hydrualic Operated FixtureDocumento64 páginasDesign and Execution of Hydrualic Operated FixtureGetahun SeifuAinda não há avaliações
- Ijmet 08 06 013Documento5 páginasIjmet 08 06 013Adina ShaikhAinda não há avaliações
- High Speed Helical GearsDocumento0 páginaHigh Speed Helical GearsAnibal Rios100% (1)
- Case Study Djj50203 (GRP Sethu)Documento14 páginasCase Study Djj50203 (GRP Sethu)Roysilva SilvaAinda não há avaliações
- Wheel Balancing MachineDocumento26 páginasWheel Balancing MachinePatrick Marc Brunelle100% (2)
- Design and Analysis of Gear-Box Using Spur Gear and Eliminating The Differential UnitDocumento8 páginasDesign and Analysis of Gear-Box Using Spur Gear and Eliminating The Differential UnitmohanAinda não há avaliações
- Bevel Gear PraveenDocumento23 páginasBevel Gear Praveen18WJ1A03F4 Shashank reddyAinda não há avaliações
- Twist Control Grinding Gear Technology ReishauerDocumento6 páginasTwist Control Grinding Gear Technology Reishauerswarnava paulAinda não há avaliações
- Finite Element Analysis of Orbital Forming Used in Spindle/Inner Ring AssemblyDocumento6 páginasFinite Element Analysis of Orbital Forming Used in Spindle/Inner Ring AssemblyEldori1988Ainda não há avaliações
- Differential & Bevel GearDocumento7 páginasDifferential & Bevel GearNadhifatulAinda não há avaliações
- Face Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannDocumento8 páginasFace Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannosaniamecAinda não há avaliações
- Spur Gear Design Learn EngineeringDocumento4 páginasSpur Gear Design Learn EngineeringImran Sajid ShahidAinda não há avaliações
- Shaping Breakthrough: Eliminating Mechanical Guides To Take Time and Cost Out of Helical Gear ProductionDocumento6 páginasShaping Breakthrough: Eliminating Mechanical Guides To Take Time and Cost Out of Helical Gear ProductionSanjay MehrishiAinda não há avaliações
- Spiral Bevel Gear - Calculation of StrenghtDocumento28 páginasSpiral Bevel Gear - Calculation of StrenghtCarlo_Filippin85% (13)
- Automotive Machining: A Guide to Boring, Decking, Honing & MoreNo EverandAutomotive Machining: A Guide to Boring, Decking, Honing & MoreNota: 4.5 de 5 estrelas4.5/5 (11)
- GM Automatic Overdrive Transmission Builder's and Swapper's GuideNo EverandGM Automatic Overdrive Transmission Builder's and Swapper's GuideNota: 4.5 de 5 estrelas4.5/5 (8)
- Southern Marine Engineering Desk Reference: Second Edition Volume IiNo EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiAinda não há avaliações
- How to Rebuild & Modify Ford C4 & C6 Automatic TransmissionsNo EverandHow to Rebuild & Modify Ford C4 & C6 Automatic TransmissionsNota: 5 de 5 estrelas5/5 (5)
- Echnica : Improvement of Turbocharger Life For Diesel and Gasoline EnginesDocumento12 páginasEchnica : Improvement of Turbocharger Life For Diesel and Gasoline EnginessamanaveenAinda não há avaliações
- pm038 Maziasz 2012 oDocumento13 páginaspm038 Maziasz 2012 osamanaveenAinda não há avaliações
- AdhesivesDocumento458 páginasAdhesivesArturs Stangainis100% (6)
- Gear Materials, Properties, and ManufactureDocumento347 páginasGear Materials, Properties, and ManufactureFrançois Steinmetz91% (11)
- Sae Technical Paper Series: Edward H. Williams IIIDocumento9 páginasSae Technical Paper Series: Edward H. Williams IIIsamanaveenAinda não há avaliações
- Section Paper.: Worm-Gears and Worm-Geared Axles1Documento13 páginasSection Paper.: Worm-Gears and Worm-Geared Axles1samanaveenAinda não há avaliações
- Influence of Gear Geometry On Gearbox Noise Reduction - An Experimental InvestigationDocumento7 páginasInfluence of Gear Geometry On Gearbox Noise Reduction - An Experimental InvestigationsamanaveenAinda não há avaliações
- It Is Stated Tha, T Gear GrindingDocumento11 páginasIt Is Stated Tha, T Gear GrindingsamanaveenAinda não há avaliações
- Simultaneous Inspection and Correction of Gears in ProductionDocumento9 páginasSimultaneous Inspection and Correction of Gears in ProductionsamanaveenAinda não há avaliações
- SAE Paper 2002-01-2071Documento10 páginasSAE Paper 2002-01-2071samanaveenAinda não há avaliações
- One Pipe Steam DesignDocumento44 páginasOne Pipe Steam Designreyes hernandezAinda não há avaliações
- E-Line DLDocumento21 páginasE-Line DLiulian17dAinda não há avaliações
- ARSTRUCTS Chapter1Documento15 páginasARSTRUCTS Chapter1Aila MaeAinda não há avaliações
- Uponor Dop Klett CPR 20 Ic 251 V 001Documento3 páginasUponor Dop Klett CPR 20 Ic 251 V 001jamppajoo2Ainda não há avaliações
- ProjectDocumento34 páginasProjectSarvajeet Kshirsagar100% (1)
- Haldimann - Structural Use of Glass BookDocumento221 páginasHaldimann - Structural Use of Glass BookKenny Tournoy100% (6)
- Revised Malaysian Code of Practice For Structural Use of TimberDocumento6 páginasRevised Malaysian Code of Practice For Structural Use of Timbermcwong_98Ainda não há avaliações
- Electromagnetic CompatibilityDocumento12 páginasElectromagnetic Compatibilityoadipphone7031Ainda não há avaliações
- Chrony Beta and GammaDocumento36 páginasChrony Beta and GammaÁdám MajorAinda não há avaliações
- ThaiREC Checklist-Barge Inspection Questionnaire GasDocumento18 páginasThaiREC Checklist-Barge Inspection Questionnaire Gasเปีย วันชัย สวนทอง100% (1)
- Bosch Powerpack-BrochureDocumento16 páginasBosch Powerpack-BrochurengazawooAinda não há avaliações
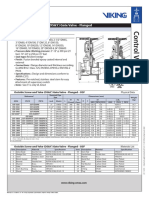
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocumento2 páginasOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoAinda não há avaliações
- CSG CMT CalculationsDocumento5 páginasCSG CMT Calculationsfrancisryan4519Ainda não há avaliações
- Brother Dr420 Drum ResetDocumento1 páginaBrother Dr420 Drum ResetJaime RiosAinda não há avaliações
- SAX Brochure - Web ReadyDocumento4 páginasSAX Brochure - Web ReadyEng-Ahmad Abo-AledousAinda não há avaliações
- Tensile Properties of Ground Coffee Waste Reinforced Polyethylene CompositeDocumento4 páginasTensile Properties of Ground Coffee Waste Reinforced Polyethylene CompositemhmmdzulvaAinda não há avaliações
- 592-A2GA DesbloqueadoDocumento27 páginas592-A2GA DesbloqueadoVicktor GranadosAinda não há avaliações
- Module D Exercise ModD - QB09 - EngDocumento4 páginasModule D Exercise ModD - QB09 - Engapi-3812894Ainda não há avaliações
- Msi ms-7222 Rev 3.0 SCH PDFDocumento30 páginasMsi ms-7222 Rev 3.0 SCH PDFRodney RibeiroAinda não há avaliações
- Jadual 6 MpobDocumento11 páginasJadual 6 MpobTipah HafizahAinda não há avaliações
- Master Thesis: Tasuku KanedaDocumento77 páginasMaster Thesis: Tasuku Kanedamkali345Ainda não há avaliações
- No35-Inclined Roof SystemDocumento24 páginasNo35-Inclined Roof SystemKitanovic NenadAinda não há avaliações
- C 1252 PDFDocumento5 páginasC 1252 PDFAgatha ShirleyAinda não há avaliações
- Opus UserguideDocumento313 páginasOpus UserguideMoez EssafiAinda não há avaliações
- Vem BrochureDocumento8 páginasVem BrochureVamshi Krishnam Raju NadimpalliAinda não há avaliações
- PSC Girder MethodologyDocumento12 páginasPSC Girder MethodologySaurabh KumarAinda não há avaliações
- Chemical Induetries-1Documento75 páginasChemical Induetries-1Muhammad Anees Ur RehmanAinda não há avaliações
- Calculation Rail Beam (Hoist Capacity 3 Ton)Documento4 páginasCalculation Rail Beam (Hoist Capacity 3 Ton)Edo Faizal2Ainda não há avaliações
- Sand Control PDFDocumento88 páginasSand Control PDFThọ Phương100% (1)
- Deaton FE Slab DesignDocumento57 páginasDeaton FE Slab DesignMohamed AliAinda não há avaliações