Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Simulation of Phase Controlled Rectifiers UsingDocumento10 páginasSimulation of Phase Controlled Rectifiers UsinggubiliAinda não há avaliações
- 33 KV Control Relay Spec PDFDocumento75 páginas33 KV Control Relay Spec PDFMohanta Amrit100% (2)
- Fujitsu Air Conditioner Service ManualDocumento22 páginasFujitsu Air Conditioner Service Manualnovy100% (1)
- Self NoiseDocumento7 páginasSelf NoiseGirish BellurAinda não há avaliações
- System-Level ESD - EMI Protection GuideDocumento25 páginasSystem-Level ESD - EMI Protection GuideArvind SinghAinda não há avaliações
- Start Download: General Science-Physics - Newton's LawsDocumento3 páginasStart Download: General Science-Physics - Newton's Lawsteju2812Ainda não há avaliações
- Computers Question Bank For Bank ExamDocumento41 páginasComputers Question Bank For Bank Examteju2812Ainda não há avaliações
- Reg No: 161582 Date: 03 Feb 2016. Student Name: JOSYULA TEJASWI Key For RRB NTPC Model Test 3Documento1 páginaReg No: 161582 Date: 03 Feb 2016. Student Name: JOSYULA TEJASWI Key For RRB NTPC Model Test 3teju2812Ainda não há avaliações
- AAI Junior Executive Application FormDocumento3 páginasAAI Junior Executive Application Formteju2812Ainda não há avaliações
- AAI View PageDocumento1 páginaAAI View Pageteju2812Ainda não há avaliações
- Thrillophilia App Book Tour and Activities On The Go!Documento17 páginasThrillophilia App Book Tour and Activities On The Go!teju2812Ainda não há avaliações
- Veerababu ResumeDocumento3 páginasVeerababu Resumeteju2812Ainda não há avaliações
- Virajas Elite Dentistree Offer 1: Consultation + Scaling + Polishing + X-Ray (If Required) + 2 Non-Surgical Extractions (If Required)Documento1 páginaVirajas Elite Dentistree Offer 1: Consultation + Scaling + Polishing + X-Ray (If Required) + 2 Non-Surgical Extractions (If Required)teju2812Ainda não há avaliações
- DR BBP New Flight FormatDocumento5 páginasDR BBP New Flight Formatteju2812Ainda não há avaliações
- ISNCON-2015 Stay Cab RegistrationDocumento1 páginaISNCON-2015 Stay Cab Registrationteju2812Ainda não há avaliações
- Combined Graduate Level Examination - 2014Documento4 páginasCombined Graduate Level Examination - 2014teju2812Ainda não há avaliações
- Sagi Ramakrishnam Raju Engineering College: CertificateDocumento1 páginaSagi Ramakrishnam Raju Engineering College: Certificateteju2812Ainda não há avaliações
- Dec and AckDocumento2 páginasDec and Ackteju2812Ainda não há avaliações
- RINL, Visakhapatnam Steel PlantDocumento1 páginaRINL, Visakhapatnam Steel Plantteju2812Ainda não há avaliações
- YasKawa Documentation Sigma VDocumento114 páginasYasKawa Documentation Sigma VRobert DăboiAinda não há avaliações
- Difetti VCRDocumento166 páginasDifetti VCRradiobruno67% (3)
- Data Sheet 1500kw 6.6kv Pa Fan MotorDocumento4 páginasData Sheet 1500kw 6.6kv Pa Fan MotorRamesh CuppuAinda não há avaliações
- Instruction Manual MPU Analog Output 4-20 MaDocumento20 páginasInstruction Manual MPU Analog Output 4-20 MaSIDHANT JOSHIAinda não há avaliações
- Li-MnO2 Batteries (Amicell)Documento3 páginasLi-MnO2 Batteries (Amicell)MedSparkAinda não há avaliações
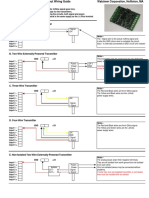
- 4-20ma Input WiringDocumento2 páginas4-20ma Input WiringAnurag Gupta100% (1)
- Mechatronics 2.3Documento2 páginasMechatronics 2.3Rohan YadavAinda não há avaliações
- Technical Terms: Charged Particle of An AtomDocumento18 páginasTechnical Terms: Charged Particle of An AtomMojere GuardiarioAinda não há avaliações
- PD-42DX CH - MK (sm-52088)Documento140 páginasPD-42DX CH - MK (sm-52088)Roberd MihailovAinda não há avaliações
- 74194Documento13 páginas74194Dgf CmaAinda não há avaliações
- 158330715Documento141 páginas158330715Murtaza SieamAinda não há avaliações
- Gmail - Order 8117270258209721 Is Good To Go! PDFDocumento4 páginasGmail - Order 8117270258209721 Is Good To Go! PDFEug. Sam.Ainda não há avaliações
- Listrik SistemDocumento35 páginasListrik SistemBintang MajusiAinda não há avaliações
- NivocontDocumento2 páginasNivocontRusty AllenAinda não há avaliações
- Light Previous Years Shobhit NirwanDocumento12 páginasLight Previous Years Shobhit NirwanPramod ChoudharyAinda não há avaliações
- Telemecanique Xps ArDocumento49 páginasTelemecanique Xps ArJojo Candari0% (1)
- 22 MM Installation Instructions For The M701E Output Module: Rotate Ruotare Girar Drehen Plug Inserire Conectar EinhakenDocumento4 páginas22 MM Installation Instructions For The M701E Output Module: Rotate Ruotare Girar Drehen Plug Inserire Conectar EinhakenRicardo Jose Cerdá AliagaAinda não há avaliações
- MS8218 English ManualDocumento46 páginasMS8218 English ManualMircea RadulescuAinda não há avaliações
- LM4765Documento19 páginasLM4765joe ramAinda não há avaliações
- SEMIKRON Technical Explanation SEMiX® - IGBT Modules + Bridge Rectifier Family EN 2009-10-14 Rev-03Documento36 páginasSEMIKRON Technical Explanation SEMiX® - IGBT Modules + Bridge Rectifier Family EN 2009-10-14 Rev-03Michael SalcedoAinda não há avaliações
- Guide Questions, Electrolysis Set-Up Labeling Parts & Defining Terminologies - PILLADocumento6 páginasGuide Questions, Electrolysis Set-Up Labeling Parts & Defining Terminologies - PILLAkloyidAinda não há avaliações
- Section 260573 - Electrical Systems Analysis PartDocumento7 páginasSection 260573 - Electrical Systems Analysis PartBoxer099Ainda não há avaliações
- Eta RubricDocumento80 páginasEta Rubricapi-313716520Ainda não há avaliações
- 1SVR730020R0200 CT Mvs 21sDocumento6 páginas1SVR730020R0200 CT Mvs 21sismael liantsoaAinda não há avaliações
- Econoled by Trend LightingDocumento1 páginaEconoled by Trend LightingFrederickAinda não há avaliações