Você também pode gostar
- Method of Designing Zvs Boost Converter: Mirosáaw Luft, Elībieta Szychta, Leszek SzychtaDocumento5 páginasMethod of Designing Zvs Boost Converter: Mirosáaw Luft, Elībieta Szychta, Leszek SzychtaJeena MathewAinda não há avaliações
- K Anonymity and Cluster Based MethodsDocumento37 páginasK Anonymity and Cluster Based MethodsJeena MathewAinda não há avaliações
- Machine Learning Tutorial Machine Learning TutorialDocumento33 páginasMachine Learning Tutorial Machine Learning TutorialSudhakar MurugasenAinda não há avaliações
- Expert Systems With Applications: Florin Gorunescu, Smaranda Belciug, Marina Gorunescu, Radu BadeaDocumento9 páginasExpert Systems With Applications: Florin Gorunescu, Smaranda Belciug, Marina Gorunescu, Radu BadeaJeena MathewAinda não há avaliações
- Prediction of Student Academic Performance by An Application of K-Means Clustering AlgorithmDocumento3 páginasPrediction of Student Academic Performance by An Application of K-Means Clustering AlgorithmJeena MathewAinda não há avaliações
- ID3 AllanNeymarkDocumento22 páginasID3 AllanNeymarkRajesh KumarAinda não há avaliações
- R M S - D R C: Esource Anagement For Oftware Efined Adio LoudsDocumento10 páginasR M S - D R C: Esource Anagement For Oftware Efined Adio LoudsJeena MathewAinda não há avaliações
- Adv AP HighEduDocumento62 páginasAdv AP HighEduJeena MathewAinda não há avaliações
- Lecture14 Unix Advanced CommandsDocumento13 páginasLecture14 Unix Advanced CommandsJeena MathewAinda não há avaliações
- Teaching Aptitude PDFDocumento16 páginasTeaching Aptitude PDFjbvksAinda não há avaliações
- Article2013 MAC201310050Documento6 páginasArticle2013 MAC201310050Jeena MathewAinda não há avaliações
- RC1835Documento5 páginasRC1835Jeena MathewAinda não há avaliações
- Novel Approach To Evaluate Student Performance Using Data MiningDocumento6 páginasNovel Approach To Evaluate Student Performance Using Data MiningJeena MathewAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Formulas To RememberDocumento6 páginasFormulas To Rememberuygurzeren100% (3)
- Sewerage & Sewage Treatment PlantDocumento26 páginasSewerage & Sewage Treatment PlantSyed ZamanAinda não há avaliações
- CLS 747 200Documento158 páginasCLS 747 200Rodrigo Adam100% (8)
- The Reef Wayfinding Plan and Signage Design Concept 28 August 2019Documento51 páginasThe Reef Wayfinding Plan and Signage Design Concept 28 August 2019Michele MontoloAinda não há avaliações
- Skytrain Avia Services: Emergency Procedures ManualDocumento32 páginasSkytrain Avia Services: Emergency Procedures ManualEndro RastadiAinda não há avaliações
- EM230 BR BM3 Fitting InstructionsDocumento2 páginasEM230 BR BM3 Fitting InstructionsRoman BabaevAinda não há avaliações
- Jamesbury Polymer and Elastomer Selection GuideDocumento20 páginasJamesbury Polymer and Elastomer Selection Guidesheldon1jay100% (1)
- Programming Bayes Rule OptionalDocumento17 páginasProgramming Bayes Rule OptionalajuhaseenAinda não há avaliações
- Solar Module CellDocumento4 páginasSolar Module CellVinod BabhaleAinda não há avaliações
- VXN150 Vixion Fuel Tank PDFDocumento3 páginasVXN150 Vixion Fuel Tank PDFHarris Jum'aniandaAinda não há avaliações
- Makita 2708Documento29 páginasMakita 2708Reuel JacintoAinda não há avaliações
- J.M. Hurst Cyclic AnalysisDocumento45 páginasJ.M. Hurst Cyclic AnalysisChristian Robinson80% (10)
- Network Analysis Chap. 4 First Order Differential EquationDocumento5 páginasNetwork Analysis Chap. 4 First Order Differential EquationSreeram Vijapurapu0% (1)
- Product Management Self-Learning ManualDocumento261 páginasProduct Management Self-Learning ManualAbhishek Arekar100% (1)
- Bernard D. Marquez Eduardo M. Axalan Engr. William A.L.T. NGDocumento1 páginaBernard D. Marquez Eduardo M. Axalan Engr. William A.L.T. NGRhon Nem KhoAinda não há avaliações
- Doing Hot Work On Gas ShipDocumento5 páginasDoing Hot Work On Gas ShipAnonymous icnhaNsFAinda não há avaliações
- KST GlueTech 44 enDocumento80 páginasKST GlueTech 44 enLeandro RadamesAinda não há avaliações
- Whirlpool Duet HTDocumento96 páginasWhirlpool Duet HTdanny85901100% (2)
- David Lowe Thesis PDFDocumento201 páginasDavid Lowe Thesis PDFKRISHNA VAMSHIAinda não há avaliações
- Fast, Accurate Data Management Across The Enterprise: Fact Sheet: File-Aid / MvsDocumento4 páginasFast, Accurate Data Management Across The Enterprise: Fact Sheet: File-Aid / MvsLuis RamirezAinda não há avaliações
- 4 and 6 Pole MotorDocumento6 páginas4 and 6 Pole Motorarajamani78100% (1)
- Pioneer XDP - 30R ManualDocumento213 páginasPioneer XDP - 30R Manualmugurel_stanescuAinda não há avaliações
- Cache MemoryDocumento20 páginasCache MemoryKeshav Bharadwaj RAinda não há avaliações
- Riscv SpecDocumento32 páginasRiscv SpeckartimidAinda não há avaliações
- GM Passlock II SystemDocumento14 páginasGM Passlock II Systemalmia tronicsAinda não há avaliações
- Published Document Guidance On The Use of BS EN 13108, Bituminous Mixtures - Material SpecificationsDocumento8 páginasPublished Document Guidance On The Use of BS EN 13108, Bituminous Mixtures - Material SpecificationsCristián JiménezAinda não há avaliações
- Efficia Infant WarmingDocumento8 páginasEfficia Infant WarmingNurhidayat MursalinAinda não há avaliações
- Lesson Plan 2 Road FurnitureDocumento4 páginasLesson Plan 2 Road FurnitureShahbaz SharifAinda não há avaliações
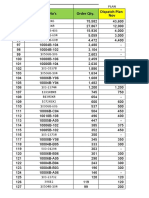
- Order Qty Vs Dispatch Plan - 04 11 20Documento13 páginasOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPAinda não há avaliações
- Trade List 13 Mar 2019Documento74 páginasTrade List 13 Mar 2019Bharat JainAinda não há avaliações