Você também pode gostar
- Introduction To Statistics Assignment II: Median 4.25Documento5 páginasIntroduction To Statistics Assignment II: Median 4.25Fikir FikirAinda não há avaliações
- Re-Circulation Loop: PC AttDocumento5 páginasRe-Circulation Loop: PC AttFikir FikirAinda não há avaliações
- 2.1 Definition of Budget: Literature ReviewDocumento10 páginas2.1 Definition of Budget: Literature ReviewFikir FikirAinda não há avaliações
- Call For Virtual Workshop On Aerospace, Digital Transformation, & Artificial IntelligenceDocumento2 páginasCall For Virtual Workshop On Aerospace, Digital Transformation, & Artificial IntelligenceFikir FikirAinda não há avaliações
- Your Palm Reading Results!Documento3 páginasYour Palm Reading Results!Fikir FikirAinda não há avaliações
- Description of Job For Marie Curie 5GWireless ProjectDocumento3 páginasDescription of Job For Marie Curie 5GWireless ProjectFikir FikirAinda não há avaliações
- Interesting Facts About AquariusDocumento9 páginasInteresting Facts About AquariusFikir FikirAinda não há avaliações
- Finite-Difference Time-Domain Method and Its ApplicationsDocumento34 páginasFinite-Difference Time-Domain Method and Its ApplicationsFikir FikirAinda não há avaliações
- Digital Aerial Cameras: NtroductionDocumento5 páginasDigital Aerial Cameras: NtroductionFikir FikirAinda não há avaliações
- TC GSM OverviewDocumento80 páginasTC GSM OverviewFikir FikirAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Kina23744ens 002-Seisracks1Documento147 páginasKina23744ens 002-Seisracks1Adrian_Condrea_4281Ainda não há avaliações
- Computer Graphics Question For Final ExamDocumento3 páginasComputer Graphics Question For Final ExamMd Rifat BhuiyanAinda não há avaliações
- Biology FileDocumento10 páginasBiology FileMichael KorsAinda não há avaliações
- Shape The Future Listening Practice - Unit 3 - Without AnswersDocumento1 páginaShape The Future Listening Practice - Unit 3 - Without Answersleireleire20070701Ainda não há avaliações
- Waves Scattering Induced by An Interface Crack in A Coated MaterialDocumento6 páginasWaves Scattering Induced by An Interface Crack in A Coated MaterialDarioLampaAinda não há avaliações
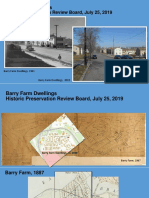
- Barry Farm Powerpoint SlidesDocumento33 páginasBarry Farm Powerpoint SlidessarahAinda não há avaliações
- 2.2 Lesson Notes FA12Documento24 páginas2.2 Lesson Notes FA12JAPAinda não há avaliações
- 1 BN Sintax SemanticsDocumento10 páginas1 BN Sintax SemanticsJackAinda não há avaliações
- Money, Sex, and Power: Toward A Feminist Historical MaterialismDocumento2 páginasMoney, Sex, and Power: Toward A Feminist Historical MaterialismddwererAinda não há avaliações
- Senior Project Manager Marketing in Toronto Canada Resume Cindy KempDocumento2 páginasSenior Project Manager Marketing in Toronto Canada Resume Cindy KempCindyKempAinda não há avaliações
- Mutants & Masterminds 1st Ed Character Generater (Xls Spreadsheet)Documento89 páginasMutants & Masterminds 1st Ed Character Generater (Xls Spreadsheet)WesleyAinda não há avaliações
- The Seven Perceptual Learning StylesDocumento3 páginasThe Seven Perceptual Learning StylesRamona FloreaAinda não há avaliações
- Unification of Euler and Werner Deconvolution in Three Dimensions Via The Generalized Hilbert TransformDocumento6 páginasUnification of Euler and Werner Deconvolution in Three Dimensions Via The Generalized Hilbert TransformMithunAinda não há avaliações
- Total School Spending in Singapore: Task 1 020219Documento6 páginasTotal School Spending in Singapore: Task 1 020219viper_4554Ainda não há avaliações
- Multithreading AlgorithmsDocumento36 páginasMultithreading AlgorithmsAsna TariqAinda não há avaliações
- Cee 2005 - 06Documento129 páginasCee 2005 - 06iloveeggxPAinda não há avaliações
- Joshi C M, Vyas Y - Extensions of Certain Classical Integrals of Erdélyi For Gauss Hypergeometric Functions - J. Comput. and Appl. Mat. 160 (2003) 125-138Documento14 páginasJoshi C M, Vyas Y - Extensions of Certain Classical Integrals of Erdélyi For Gauss Hypergeometric Functions - J. Comput. and Appl. Mat. 160 (2003) 125-138Renee BravoAinda não há avaliações
- HiPerMat 2012 KasselDocumento1.059 páginasHiPerMat 2012 KasselAna Mafalda MatosAinda não há avaliações
- The Doppler EffectLDocumento2 páginasThe Doppler EffectLintan100% (1)
- Semi-Conductor Laboratory - MohaliDocumento4 páginasSemi-Conductor Laboratory - MohalimanjnderAinda não há avaliações
- B.tech - Non Credit Courses For 2nd Year StudentsDocumento4 páginasB.tech - Non Credit Courses For 2nd Year StudentsNishant MishraAinda não há avaliações
- The Iron Warrior: Volume 25, Issue 11Documento8 páginasThe Iron Warrior: Volume 25, Issue 11The Iron WarriorAinda não há avaliações
- Unliquidated Cash Advances 3rd Quarter 2020Documento10 páginasUnliquidated Cash Advances 3rd Quarter 2020kQy267BdTKAinda não há avaliações
- SLC 10 ScienceDocumento16 páginasSLC 10 SciencePffflyers KurnawanAinda não há avaliações
- IRJES 2017 Vol. 1 Special Issue 2 English Full Paper 038Documento6 páginasIRJES 2017 Vol. 1 Special Issue 2 English Full Paper 038liew wei keongAinda não há avaliações
- 1-Employees Retention Strategies in Reliance Retail LTD Thesis 85pDocumento6 páginas1-Employees Retention Strategies in Reliance Retail LTD Thesis 85pArunKumar100% (1)
- Non-Display Industrial Computers: User ManualDocumento100 páginasNon-Display Industrial Computers: User ManualJason100% (1)
- LG 55lw5600 Chassis La12c SMDocumento29 páginasLG 55lw5600 Chassis La12c SMwandag2010Ainda não há avaliações
- ESG Assignment Part 2: Shareholder ActivismDocumento6 páginasESG Assignment Part 2: Shareholder ActivismParesh ShrivastavaAinda não há avaliações
- Problem Solving and Algorithms: Problems, Solutions, and ToolsDocumento12 páginasProblem Solving and Algorithms: Problems, Solutions, and ToolsskarthikpriyaAinda não há avaliações