Você também pode gostar
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraNo EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAinda não há avaliações
- Centros InstantaneosDocumento26 páginasCentros InstantaneosLalo SanchezAinda não há avaliações
- Principios de transferencia de cantidad de movimientoNo EverandPrincipios de transferencia de cantidad de movimientoAinda não há avaliações
- Informe ANÁLISIS DE VELOCIDAD Y ACELERACIÓN EN MECANISMOS Mauricio Arteaga 28.796.764Documento12 páginasInforme ANÁLISIS DE VELOCIDAD Y ACELERACIÓN EN MECANISMOS Mauricio Arteaga 28.796.764XchaveztentacionAinda não há avaliações
- Velocidad y Aceleracion de MecanismosDocumento16 páginasVelocidad y Aceleracion de MecanismosRafael Rodriguez100% (1)
- Transformación de radón: Revelando patrones ocultos en datos visualesNo EverandTransformación de radón: Revelando patrones ocultos en datos visualesAinda não há avaliações
- Tema MecanismosDocumento13 páginasTema MecanismosLuisAinda não há avaliações
- Modelo de cámara estenopeica: Comprender la perspectiva a través de la óptica computacionalNo EverandModelo de cámara estenopeica: Comprender la perspectiva a través de la óptica computacionalAinda não há avaliações
- Tarea3 Analisis Cinematicos de Mecanismos PlanosDocumento18 páginasTarea3 Analisis Cinematicos de Mecanismos PlanosMaría Kantun UcAinda não há avaliações
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsNo EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsAinda não há avaliações
- Definiciones de MecanismosDocumento7 páginasDefiniciones de MecanismosBetancourt LRAinda não há avaliações
- Mecanismos de 4 Barras - 2Documento29 páginasMecanismos de 4 Barras - 2pipe spAinda não há avaliações
- Metodos Graficos de Analisis Cinematico de MecanismosDocumento19 páginasMetodos Graficos de Analisis Cinematico de MecanismosJesusDavidAinda não há avaliações
- Practica 2 Diseño de MecanismosDocumento8 páginasPractica 2 Diseño de MecanismosFabián Lara100% (1)
- R 63084Documento25 páginasR 63084Erick JiménezAinda não há avaliações
- Ejercicios de Polos - EstaticaDocumento8 páginasEjercicios de Polos - EstaticaAlexandra HrnandezAinda não há avaliações
- Mecanismos Unidad 2Documento12 páginasMecanismos Unidad 2Jose Salaya JuventahinoAinda não há avaliações
- Metodo GraficoDocumento13 páginasMetodo GraficoFrancisco AltamiranoAinda não há avaliações
- Dinámica Clase 16Documento37 páginasDinámica Clase 16karla52Ainda não há avaliações
- Asignacion CinematicaDocumento14 páginasAsignacion CinematicaEliecer Bello GarciaAinda não há avaliações
- Mecanismo 4 Barras PDFDocumento4 páginasMecanismo 4 Barras PDFJuan PradoAinda não há avaliações
- Practica 2B Analisis Cinematico de Aceleracion-1953550-Ima-Br104Documento7 páginasPractica 2B Analisis Cinematico de Aceleracion-1953550-Ima-Br104Abdiel MoralesAinda não há avaliações
- Análisis de Mecanismos de PalancasDocumento15 páginasAnálisis de Mecanismos de PalancasVíctor Hugo RodríguezAinda não há avaliações
- Metodos Graficos de Analisis Cinematico PDFDocumento21 páginasMetodos Graficos de Analisis Cinematico PDFlesyrgAinda não há avaliações
- Análisis CinemáticoDocumento42 páginasAnálisis CinemáticoLuis Aguilar CentenoAinda não há avaliações
- P2 - 17310236 - Análisis de VelocidadesDocumento9 páginasP2 - 17310236 - Análisis de VelocidadesJosue Assael Peña SerafinAinda não há avaliações
- Analisis de Las Aceleraciones de Un MecanismoDocumento15 páginasAnalisis de Las Aceleraciones de Un MecanismoCarlos Gonzalez100% (1)
- Análisis de Posición de Mecanismos PlanosDocumento32 páginasAnálisis de Posición de Mecanismos PlanosJesus MoralesAinda não há avaliações
- Capítulo 2Documento87 páginasCapítulo 2albertoAinda não há avaliações
- Varios Mecànica General 1Documento16 páginasVarios Mecànica General 1Becquer PozoAinda não há avaliações
- 2.3 Análisis de Aceleración de Mecanismos Planos Por Método Gráfico y Analítico.Documento13 páginas2.3 Análisis de Aceleración de Mecanismos Planos Por Método Gráfico y Analítico.Maritza Guadalupe50% (2)
- D2U1 Correa FrancisDocumento12 páginasD2U1 Correa FrancisFrancis Paul Correa GironAinda não há avaliações
- 07 VelocidadDocumento56 páginas07 VelocidadJORGE EDUARDO DE LA OSSA DORIAAinda não há avaliações
- Analisis de Mecanismos PlanosDocumento25 páginasAnalisis de Mecanismos PlanosEdwin CaceresAinda não há avaliações
- Clase 11 Aceleracion UTPDocumento21 páginasClase 11 Aceleracion UTPcorpses88Ainda não há avaliações
- Analisis de Desplazamientos MecánicosDocumento36 páginasAnalisis de Desplazamientos MecánicosEnrique TopeteAinda não há avaliações
- Análisis de VelocidadDocumento5 páginasAnálisis de VelocidadKenny SaAinda não há avaliações
- Análisis Cinemático Del Mecanismo PlanoDocumento9 páginasAnálisis Cinemático Del Mecanismo PlanoHarold Ramirez De La TorreAinda não há avaliações
- Entrega Final ProyectoDocumento12 páginasEntrega Final ProyectoHollman BecerraAinda não há avaliações
- Movimiento Curvilíneo de Una PartículaDocumento12 páginasMovimiento Curvilíneo de Una PartículaRoqee CazaresAinda não há avaliações
- Cinematica de Un Cuerpo RigidoDocumento10 páginasCinematica de Un Cuerpo RigidoCarlos LLivisacaAinda não há avaliações
- Cinematica Plana de Un Cuerpo RigidoDocumento57 páginasCinematica Plana de Un Cuerpo RigidoMijhael Anatholi Romero Mamani100% (1)
- Relacion Movimiento Angular y Lineal PDFDocumento6 páginasRelacion Movimiento Angular y Lineal PDFJuan LópezAinda não há avaliações
- Practica 7 Ejes GiratoriosDocumento4 páginasPractica 7 Ejes GiratoriosJassia CortésAinda não há avaliações
- 1.3 Analisis de VelocidadDocumento3 páginas1.3 Analisis de VelocidadItachiDios UchihaAinda não há avaliações
- Monografia LevasDocumento24 páginasMonografia Levasjosh1419Ainda não há avaliações
- Cinemática de Las MáquinasDocumento1 páginaCinemática de Las MáquinasRenato SaavedraAinda não há avaliações
- El Método Del Vector EspacialDocumento3 páginasEl Método Del Vector EspacialEric PierceAinda não há avaliações
- Tema 2 - Segunda Parte. Análisis Cinemático de Mecanismos PlanosDocumento38 páginasTema 2 - Segunda Parte. Análisis Cinemático de Mecanismos Planosalbertocc1978100% (1)
- Análisis de Velocidades Por El Método Del PolígonoDocumento8 páginasAnálisis de Velocidades Por El Método Del PolígonoPalacios Ezequiel100% (6)
- Guía de Estudio de Cinemática Parte IIIDocumento6 páginasGuía de Estudio de Cinemática Parte IIIpabloAinda não há avaliações
- Sesión 2 - Movimiento CurvilineoDocumento51 páginasSesión 2 - Movimiento CurvilineoAlexander Romero AraujoAinda não há avaliações
- Velocidad y Aceleración en El Movimiento CoplanarioDocumento8 páginasVelocidad y Aceleración en El Movimiento CoplanarioHerrn J. UgaldeAinda não há avaliações
- ECR - 2074392 - Practica 2B - Lab. DinamicaDocumento9 páginasECR - 2074392 - Practica 2B - Lab. DinamicaJennifer LunaAinda não há avaliações
- Relación Entre Las Magnitudes Angulares y LinealesDocumento5 páginasRelación Entre Las Magnitudes Angulares y LinealesRomina OgiegloAinda não há avaliações
- Barras RígidasDocumento9 páginasBarras RígidasCristopher De La PeñaAinda não há avaliações
- Metodología de Selección Del Servomotor y Transmisión de Un Sistema de Accionamiento Mecánico Por Medio Del AnálisisDocumento11 páginasMetodología de Selección Del Servomotor y Transmisión de Un Sistema de Accionamiento Mecánico Por Medio Del AnálisisJosue Grady PlateroAinda não há avaliações
- Análisis Cinemático Del Movimiento Rectilíneo UniformeDocumento13 páginasAnálisis Cinemático Del Movimiento Rectilíneo UniformeDylan Mejia LopezAinda não há avaliações
- Pia Dinamica Equipo 4Documento16 páginasPia Dinamica Equipo 4Damian GarciaAinda não há avaliações
- Diagnostico de Los Sistemas de Inyección Electrónica deDocumento12 páginasDiagnostico de Los Sistemas de Inyección Electrónica deFerNandoAinda não há avaliações
- Bloque Del MotorDocumento13 páginasBloque Del MotorFerNando100% (1)
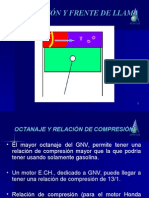
- Detonación Y Frente de LlamaDocumento20 páginasDetonación Y Frente de LlamaFerNandoAinda não há avaliações
- Aplicación de Métodos Numéricos Al Diseño de Valvulas para Motores de Combustion InternaDocumento27 páginasAplicación de Métodos Numéricos Al Diseño de Valvulas para Motores de Combustion InternaFerNandoAinda não há avaliações
- Deteccion de Planos en Ruedas de Tren Por Analisis Ultrasonico Del Contacto Rueda-Carril en Condiciones DinamicasDocumento224 páginasDeteccion de Planos en Ruedas de Tren Por Analisis Ultrasonico Del Contacto Rueda-Carril en Condiciones DinamicasFerNandoAinda não há avaliações
- Balancines y EmpujadoresDocumento16 páginasBalancines y EmpujadoresAntonio PuentesAinda não há avaliações
- Industrializacion de Bloque de Motor Diesel, Proceso de MecanizadoDocumento203 páginasIndustrializacion de Bloque de Motor Diesel, Proceso de MecanizadoFerNandoAinda não há avaliações
- CadenasDocumento26 páginasCadenasFerNandoAinda não há avaliações
- Modelos de SO (Univ. Uruguay)Documento34 páginasModelos de SO (Univ. Uruguay)jaferet27Ainda não há avaliações
- Analisis Resultados Lavador VenturiDocumento1 páginaAnalisis Resultados Lavador VenturielianapaolaperezAinda não há avaliações
- Agregados TripticoDocumento2 páginasAgregados TripticoApril Angie ChoqueAinda não há avaliações
- Identificación Del Recurso Eólico en MéxicoDocumento6 páginasIdentificación Del Recurso Eólico en MéxicoEuan Sánchez Gabriel EduardoAinda não há avaliações
- Fuentes de ConsultaDocumento2 páginasFuentes de ConsultaFernando AlexisAinda não há avaliações
- TRabajo FinalDocumento12 páginasTRabajo FinalmstarsAinda não há avaliações
- Lineamientos en CampoDocumento26 páginasLineamientos en CampoRafael Castro GarcíaAinda não há avaliações
- Diseño Hidraulico CRPDocumento12 páginasDiseño Hidraulico CRPYuri Flores RamosAinda não há avaliações
- GUÍA DE LABORATORIO N°2 - CyT 4° - La Lluvia Ácida y Los Huevos de Las AvesDocumento4 páginasGUÍA DE LABORATORIO N°2 - CyT 4° - La Lluvia Ácida y Los Huevos de Las Avesjuandiegoadauto305Ainda não há avaliações
- Técnicas de Separación de Mezclas INFORMEDocumento5 páginasTécnicas de Separación de Mezclas INFORMEJeyson Ardila100% (2)
- Desarrollo de Software EducativoDocumento180 páginasDesarrollo de Software EducativoDaniel Tellez LeonAinda não há avaliações
- NRF 027 Pemex 2009Documento33 páginasNRF 027 Pemex 2009cinthiammarin.cmAinda não há avaliações
- Reseña Joel Pozos OsorioDocumento1 páginaReseña Joel Pozos OsorioJesus Manuel Muñoz PachecoAinda não há avaliações
- Examen Tercer ParcialDocumento2 páginasExamen Tercer ParcialIDangerxI Vs , chake551Ainda não há avaliações
- Guia Quimica PDFDocumento59 páginasGuia Quimica PDFEloy Rojas Medina0% (1)
- AA1-E4-Plan de Compra de SoftwareDocumento12 páginasAA1-E4-Plan de Compra de SoftwareEl Che Che100% (1)
- Vray BibleDocumento370 páginasVray Biblepablo_gt_r50% (2)
- Materiales-Puzolanicos-Alternativos (Tarea 2)Documento4 páginasMateriales-Puzolanicos-Alternativos (Tarea 2)Alex HernandezAinda não há avaliações
- Material AcripolDocumento3 páginasMaterial AcripolSamaraFonnegraArangoAinda não há avaliações
- Diagrama Hombre MaquinaDocumento13 páginasDiagrama Hombre MaquinaMarta Troncoso BarbosaAinda não há avaliações
- Matriz Riesgo SoldadorDocumento8 páginasMatriz Riesgo SoldadorDoris MorenoAinda não há avaliações
- Asentamiento TerraplenDocumento8 páginasAsentamiento TerraplenSantiago Rodriguez LugoAinda não há avaliações
- Mantencion de Refrigerador IndustrialDocumento1 páginaMantencion de Refrigerador IndustrialMARCO CHAVEZ YNGAAinda não há avaliações
- 1er Examen Parcial ResueltoDocumento5 páginas1er Examen Parcial ResueltoZeico3Ainda não há avaliações
- Analisis Multicriterio - Grupo TP PasajerosDocumento7 páginasAnalisis Multicriterio - Grupo TP Pasajerosalexsander gilAinda não há avaliações
- Muestreo y Métodos de Análisis de Fluidos-LDGC.Documento14 páginasMuestreo y Métodos de Análisis de Fluidos-LDGC.Luis GonzalezAinda não há avaliações
- Fibras InorganicasDocumento2 páginasFibras InorganicasLUIS FERNANDO TORRES BARONAinda não há avaliações
- Manual de La MaquinaDocumento30 páginasManual de La Maquinacrengifo1726Ainda não há avaliações
- Libro de Instrucciones PDF ChimeneasDocumento27 páginasLibro de Instrucciones PDF Chimeneasmario melladoAinda não há avaliações
- PROTOCOLO DE MANTENIMIENTO PREVENTIVO DE Elevador Plataforma - Docx El PilarDocumento6 páginasPROTOCOLO DE MANTENIMIENTO PREVENTIVO DE Elevador Plataforma - Docx El PilarHumberto Huamani PalominoAinda não há avaliações