Você também pode gostar
- Clase 17-Leaching of Sulfidized Chalcopyrite With H2SO4-NaCl-O2 PDFDocumento7 páginasClase 17-Leaching of Sulfidized Chalcopyrite With H2SO4-NaCl-O2 PDFDiego JaquesAinda não há avaliações
- EPA Method 1311 PDFDocumento35 páginasEPA Method 1311 PDFsandraartetaAinda não há avaliações
- Misaelides2004 PDFDocumento7 páginasMisaelides2004 PDFDiego JaquesAinda não há avaliações
- Qwertyuiop 002Documento1 páginaQwertyuiop 002Diego JaquesAinda não há avaliações
- Qwerty 016Documento1 páginaQwerty 016Diego JaquesAinda não há avaliações
- Qwerty by Ss 001Documento1 páginaQwerty by Ss 001Diego JaquesAinda não há avaliações
- Chicken Chicken: Exploring the Language of PoultryDocumento3 páginasChicken Chicken: Exploring the Language of PoultryparlateAinda não há avaliações
- Thermophoresis and Chemical Reaction Effects on MHD Mixed ConvectionDocumento7 páginasThermophoresis and Chemical Reaction Effects on MHD Mixed ConvectionDiego JaquesAinda não há avaliações
- Westbrook FeSi1545 BrochureDocumento2 páginasWestbrook FeSi1545 BrochureDiego JaquesAinda não há avaliações
- Qwertyuiop 001Documento1 páginaQwertyuiop 001Diego JaquesAinda não há avaliações
- Qwerty 001Documento1 páginaQwerty 001Diego JaquesAinda não há avaliações
- Geldart1985 PDFDocumento12 páginasGeldart1985 PDFDiego JaquesAinda não há avaliações
- Bulk Liquid Biofilm Concentration ProfilesDocumento20 páginasBulk Liquid Biofilm Concentration ProfilesJon Bisu DebnathAinda não há avaliações
- Qwerty 005Documento1 páginaQwerty 005Diego JaquesAinda não há avaliações
- Qwerty 030Documento1 páginaQwerty 030Diego JaquesAinda não há avaliações
- Motion of A Circular Cylinder in A Rectangular Channel PDFDocumento3 páginasMotion of A Circular Cylinder in A Rectangular Channel PDFDiego JaquesAinda não há avaliações
- Rotary DryerDocumento8 páginasRotary DryerElmika TrầnAinda não há avaliações
- Arsenic Rejection From Lead Concentrate Using Aluminosulfate PDFDocumento4 páginasArsenic Rejection From Lead Concentrate Using Aluminosulfate PDFDiego JaquesAinda não há avaliações
- Particle Mixing and Segregation in Gas Solid Fluidized Beds Containing Binary MixturesDocumento9 páginasParticle Mixing and Segregation in Gas Solid Fluidized Beds Containing Binary MixturesDiego JaquesAinda não há avaliações
- Sulfuric Acid Hand Book PDFDocumento36 páginasSulfuric Acid Hand Book PDFJob Warit100% (2)
- Experimental Study of Transverse Bed Motion in Rotary Kilns: Vs (D / D P) /2Documento15 páginasExperimental Study of Transverse Bed Motion in Rotary Kilns: Vs (D / D P) /2Diego JaquesAinda não há avaliações
- Rotary Cylinders: Transverse Bed Motion Prediction RheoloeicalDocumento9 páginasRotary Cylinders: Transverse Bed Motion Prediction RheoloeicalDiego JaquesAinda não há avaliações
- EganDocumento5 páginasEganDiego JaquesAinda não há avaliações
- Sulphuric Acid Handbook 1000265717Documento268 páginasSulphuric Acid Handbook 1000265717Diego Jaques100% (1)
- Phase Equilibria in The System Feo-Fe O - Al O - Cao-Sio With Applications To Non-Ferrous Smelting SlagsDocumento6 páginasPhase Equilibria in The System Feo-Fe O - Al O - Cao-Sio With Applications To Non-Ferrous Smelting SlagsDiego JaquesAinda não há avaliações
- Experimental Techniques for Investigating Calcium Ferrite Slags at Metallic Copper SaturationDocumento8 páginasExperimental Techniques for Investigating Calcium Ferrite Slags at Metallic Copper SaturationDiego JaquesAinda não há avaliações
- Liquid UsDocumento13 páginasLiquid UsDiego JaquesAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Chapter 5: A Simple E-N Analysis MSC Fatigue 2005 Quickstart GuideDocumento26 páginasChapter 5: A Simple E-N Analysis MSC Fatigue 2005 Quickstart Guidesuhas110Ainda não há avaliações
- Manifest Guide Ebook PDFDocumento4 páginasManifest Guide Ebook PDFAnonymous dqCHWEADzAinda não há avaliações
- ELECTRON DISPLACEMENTDocumento11 páginasELECTRON DISPLACEMENTNaveen VAinda não há avaliações
- P P/ V/ X X / L P F F - F: 30.4 Decay of Turbulence Downstream From A Stilling BasinDocumento2 páginasP P/ V/ X X / L P F F - F: 30.4 Decay of Turbulence Downstream From A Stilling Basinamanj2009Ainda não há avaliações
- Physics Ch4 NotesDocumento22 páginasPhysics Ch4 NotesAli GorganiAinda não há avaliações
- Circus-Trick Science - How To Balance Anything - Science ProjectDocumento12 páginasCircus-Trick Science - How To Balance Anything - Science ProjectjimenaAinda não há avaliações
- Acoustic Levitation Using Arduino: Experiment FindingsDocumento7 páginasAcoustic Levitation Using Arduino: Experiment FindingsMichelangelo VetrugnoAinda não há avaliações
- What Is Specific Heat Capacity: EquationDocumento3 páginasWhat Is Specific Heat Capacity: Equationmikayla bryanAinda não há avaliações
- Four DimensionsDocumento19 páginasFour DimensionsDeris NougadAinda não há avaliações
- Fired Heater Design and SimulationDocumento6 páginasFired Heater Design and SimulationHarold Fernando Guavita Reyes0% (1)
- PhotonsDocumento56 páginasPhotonsbob jizzleAinda não há avaliações
- 1603 Physics Paper With Ans Sol EveningDocumento8 páginas1603 Physics Paper With Ans Sol EveningRahul RaiAinda não há avaliações
- Astm C128Documento7 páginasAstm C128Maria Bernal100% (1)
- Sample Problems Free FallDocumento3 páginasSample Problems Free FallguevarrajessphilipAinda não há avaliações
- Solidworks Flow Simulation Project Report: (Company Logo Here)Documento9 páginasSolidworks Flow Simulation Project Report: (Company Logo Here)zarzosa rabanalAinda não há avaliações
- 10B KTGDocumento16 páginas10B KTGgourav gargAinda não há avaliações
- Dynamics (Linear Impulse and Momentum)Documento4 páginasDynamics (Linear Impulse and Momentum)YadanaAinda não há avaliações
- Chem 542 Spring2010 Lecture 3 PDFDocumento45 páginasChem 542 Spring2010 Lecture 3 PDFwuachinnAinda não há avaliações
- A2 Physics Monthly Test January 2017Documento3 páginasA2 Physics Monthly Test January 2017AbhiKhanAinda não há avaliações
- HPLC Heat Exchanger Design PhilosophyDocumento28 páginasHPLC Heat Exchanger Design Philosophyagarwalashwin320% (1)
- WWW - Studyguide.pk: AS Physics - Revision Notes Unit 2 - Electricity and Thermal PhysicsDocumento3 páginasWWW - Studyguide.pk: AS Physics - Revision Notes Unit 2 - Electricity and Thermal PhysicsHany ElGezawyAinda não há avaliações
- StewartCalcET8 14 04Documento18 páginasStewartCalcET8 14 04OhoodKAlesayiAinda não há avaliações
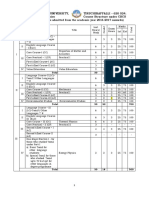
- Bharathidasan University, Tiruchirappalli - 620 024. B.Sc. Physics Course Structure Under CBCSDocumento27 páginasBharathidasan University, Tiruchirappalli - 620 024. B.Sc. Physics Course Structure Under CBCSSarjithAinda não há avaliações
- Shaftings: Cebu Institute of Technology - UniversityDocumento29 páginasShaftings: Cebu Institute of Technology - UniversityRenniel DingcongAinda não há avaliações
- Science Form 1 - Chapter 3Documento15 páginasScience Form 1 - Chapter 3Beevy GB71% (14)
- Week 6,7 - HE - Similitude and Dimensional AnalysisDocumento45 páginasWeek 6,7 - HE - Similitude and Dimensional AnalysisRana Asad AliAinda não há avaliações
- Kinematics: V U + 2asDocumento3 páginasKinematics: V U + 2asMahika PradhanAinda não há avaliações
- Energy - Wikipedia, The Free EncyclopediaDocumento15 páginasEnergy - Wikipedia, The Free EncyclopediaJay SrivastavaAinda não há avaliações
- Test AACEDocumento5 páginasTest AACECrazy BrainAinda não há avaliações
- Sample Problems 6717 PDFDocumento10 páginasSample Problems 6717 PDFnagham radiAinda não há avaliações