Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Network Design Proposal For A 5 Star HotelDocumento17 páginasNetwork Design Proposal For A 5 Star HotelNichola Gouveia100% (2)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Work Force Management Workforce ManagementDocumento27 páginasWork Force Management Workforce Managementdeepalim03Ainda não há avaliações
- ECE Laws Contracts and EthicsDocumento82 páginasECE Laws Contracts and EthicsIc Marquez89% (9)
- DE Vodafone Instructions in EnglishDocumento4 páginasDE Vodafone Instructions in EnglishAlexandru IspasAinda não há avaliações
- FSMEDocumento11 páginasFSMEIrfan Aziz Ch50% (2)
- Using Arduino in Engineering Education Motivating Students To Grow From A Hobbyist To A ProfessionalDocumento36 páginasUsing Arduino in Engineering Education Motivating Students To Grow From A Hobbyist To A ProfessionalchemavalenciaAinda não há avaliações
- Printed Circuit Board FabricationDocumento14 páginasPrinted Circuit Board FabricationchemavalenciaAinda não há avaliações
- FS300 Spectrum Analyser User ManualDocumento239 páginasFS300 Spectrum Analyser User ManualchemavalenciaAinda não há avaliações
- Image Processing With MatlabDocumento4 páginasImage Processing With MatlabchemavalenciaAinda não há avaliações
- PAM, PPM, PWM Modulation and Demodulation Trainer ST2110 LearningDocumento67 páginasPAM, PPM, PWM Modulation and Demodulation Trainer ST2110 Learningchemavalencia100% (2)
- Ipv6 Over Ipv4 Gre Tunnels: Finding Feature InformationDocumento10 páginasIpv6 Over Ipv4 Gre Tunnels: Finding Feature InformationNicolae AdelinAinda não há avaliações
- Wireless Security: Analysis and Improvement For IEEE 802.11 WLAN StandardDocumento12 páginasWireless Security: Analysis and Improvement For IEEE 802.11 WLAN StandardThanavit CheevaprabhanantAinda não há avaliações
- BT 1GHz BT100 Amplificador Motorola 1 GHZDocumento6 páginasBT 1GHz BT100 Amplificador Motorola 1 GHZRonald Osmar Poma LucanaAinda não há avaliações
- About RTL SDR RTLDocumento18 páginasAbout RTL SDR RTLasmaAinda não há avaliações
- Amazon Web Services - Two-NIC BIG-IP VEDocumento3 páginasAmazon Web Services - Two-NIC BIG-IP VEsaidov19Ainda não há avaliações
- Ewon Cosy+ ETHDocumento4 páginasEwon Cosy+ ETHtarak7787Ainda não há avaliações
- Data Communication and Computer Networks (EIE418) : Prof. E. Adetiba (PH.D, R.Engr. (COREN) )Documento101 páginasData Communication and Computer Networks (EIE418) : Prof. E. Adetiba (PH.D, R.Engr. (COREN) )John DavidAinda não há avaliações
- Ahmed M.ibrahim El-Tahir - Telecom Service Delivery - ProvisioningDocumento2 páginasAhmed M.ibrahim El-Tahir - Telecom Service Delivery - ProvisioningAhmed M. Ibrahim El-TahirAinda não há avaliações
- 13b AoIPDocumento20 páginas13b AoIPДмитрий КрысовAinda não há avaliações
- LMH1982 Preliminary DSDocumento17 páginasLMH1982 Preliminary DSMartinAinda não há avaliações
- Global AcceleratorDocumento1 páginaGlobal AcceleratorMadhav PandaAinda não há avaliações
- Ojo de Pez Dh-Ipc-Ew5541-AsDocumento3 páginasOjo de Pez Dh-Ipc-Ew5541-AsRTELKOM SOLUTIONSAinda não há avaliações
- ICT Vietnam White Book 2010 - Eng (MIC)Documento75 páginasICT Vietnam White Book 2010 - Eng (MIC)Tuan NguyenAinda não há avaliações
- Wireless Electrical Apparatus Controlling System Using RF CommunicationDocumento3 páginasWireless Electrical Apparatus Controlling System Using RF CommunicationSantosh HsAinda não há avaliações
- Application Acceleration For The Distributed Enterprise: Fast, Agile, Secure Delivery of Applications and ServicesDocumento18 páginasApplication Acceleration For The Distributed Enterprise: Fast, Agile, Secure Delivery of Applications and ServicesJackAinda não há avaliações
- Mohammed Basha RnoDocumento3 páginasMohammed Basha RnokumarAinda não há avaliações
- J - Ponuda PDFDocumento8 páginasJ - Ponuda PDFAjdin Herc AhmetovicAinda não há avaliações
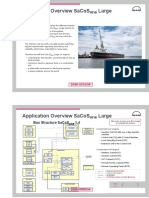
- Application Overview SaCosOneDocumento10 páginasApplication Overview SaCosOneDwi MaryadiAinda não há avaliações
- Wharton Consulting CasesDocumento77 páginasWharton Consulting CasesAntonio García HoyosAinda não há avaliações
- Lab 2 Iperf CommandDocumento5 páginasLab 2 Iperf CommandEvelina DumitrescuAinda não há avaliações
- OCB SSP ProblemsDocumento2 páginasOCB SSP ProblemsJayakrishna ReddyAinda não há avaliações
- ABC Technologies - Case StudyDocumento15 páginasABC Technologies - Case StudyNitin PandeyAinda não há avaliações
- Advanced Penetration Testing Methodology For VPNDocumento6 páginasAdvanced Penetration Testing Methodology For VPNRahmad Rumoh Aceh100% (1)
- Alternate Mark Inversion (AMI) : Summary of HDB3 Encoding RulesDocumento2 páginasAlternate Mark Inversion (AMI) : Summary of HDB3 Encoding RuleshuylednAinda não há avaliações
- Xgig® Protocol Analysis and Test PlatformDocumento8 páginasXgig® Protocol Analysis and Test PlatformvntmrAinda não há avaliações