Você também pode gostar
- A 4983Documento16 páginasA 4983Boreal3000Ainda não há avaliações
- A4988 DatasheetDocumento20 páginasA4988 DatasheetJose OnoAinda não há avaliações
- A4982 DatasheetDocumento20 páginasA4982 DatasheetmedhyalAinda não há avaliações
- A4982 DatasheetDocumento20 páginasA4982 DatasheetLêĐìnhDanhAinda não há avaliações
- A3979 DatasheetDocumento15 páginasA3979 DatasheetИван КосмонавтAinda não há avaliações
- Microstepping DMOS Driver With Translator: Features and Benefits DescriptionDocumento17 páginasMicrostepping DMOS Driver With Translator: Features and Benefits DescriptionPaulina VictoriaAinda não há avaliações
- Microstepping DMOS Driver With Translator: Description Features and BenefitsDocumento18 páginasMicrostepping DMOS Driver With Translator: Description Features and BenefitsSaid BoubkerAinda não há avaliações
- A4989 DatasheetDocumento17 páginasA4989 DatasheetGopalkrishnan Nadar100% (1)
- Dual DMOS Full-Bridge Microstepping PWM Motor Driver: Description Features and BenefitsDocumento11 páginasDual DMOS Full-Bridge Microstepping PWM Motor Driver: Description Features and BenefitsHamza KhanAinda não há avaliações
- 500 Ma Synchronous Buck Regulator, + 300 Ma LDO With Power-Good OutputDocumento30 páginas500 Ma Synchronous Buck Regulator, + 300 Ma LDO With Power-Good OutputppanagosAinda não há avaliações
- MCP3901Documento62 páginasMCP3901oxobfeAinda não há avaliações
- Serie GMD06Documento2 páginasSerie GMD06Popescu IonicaAinda não há avaliações
- MP3389 r1.04Documento16 páginasMP3389 r1.04Andres Alegria100% (1)
- Linear Technology LTC3728EG28400Documento37 páginasLinear Technology LTC3728EG28400Rickz2k8Ainda não há avaliações
- DRV 8811Documento22 páginasDRV 8811nelson_loboAinda não há avaliações
- Power Management For Battery Powered Equipment - Design GuideDocumento24 páginasPower Management For Battery Powered Equipment - Design Guideohoboho79Ainda não há avaliações
- 09 12 MG33MF02Documento209 páginas09 12 MG33MF02Aleksandar StankovićAinda não há avaliações
- Features Description: LTC3522 Synchronous 400ma Buck-Boost and 200ma Buck ConvertersDocumento20 páginasFeatures Description: LTC3522 Synchronous 400ma Buck-Boost and 200ma Buck ConvertersCop RaptiAinda não há avaliações
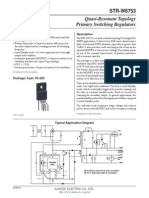
- STR W6753 DatasheetDocumento8 páginasSTR W6753 DatasheetjgerabmAinda não há avaliações
- LM2621 Low Input Voltage, Step-Up DC-DC Converter: 1 Features 3 DescriptionDocumento17 páginasLM2621 Low Input Voltage, Step-Up DC-DC Converter: 1 Features 3 DescriptionSatyashiba Sundar JenaAinda não há avaliações
- Led Driver 12 PinDocumento39 páginasLed Driver 12 PinМихаил НестеровAinda não há avaliações
- RT8293A 340kHz Synchronous Step-Down ConverterDocumento15 páginasRT8293A 340kHz Synchronous Step-Down ConverterVijay MistryAinda não há avaliações
- Programming Guide AQUADocumento230 páginasProgramming Guide AQUADejan MihailovicAinda não há avaliações
- Samsung Plasma Training ManualDocumento57 páginasSamsung Plasma Training ManualDamiao100% (1)
- Samsung Plasma Training ManualDocumento57 páginasSamsung Plasma Training ManualevaristoAinda não há avaliações
- Max038 Generador de FuncionesDocumento17 páginasMax038 Generador de FuncionesLuis Rodolfo Reyes JimenezAinda não há avaliações
- Aerosemi: Features ApplicationsDocumento9 páginasAerosemi: Features Applicationsttnaing100% (1)
- Features Description: LTC3707 High Effi Ciency, 2-Phase Synchronous Step-Down Switching RegulatorDocumento32 páginasFeatures Description: LTC3707 High Effi Ciency, 2-Phase Synchronous Step-Down Switching RegulatoruimAinda não há avaliações
- Max 2981Documento13 páginasMax 2981Jamila RobinsonAinda não há avaliações
- LMD 18200Documento14 páginasLMD 18200Itzamary Romero SosaAinda não há avaliações
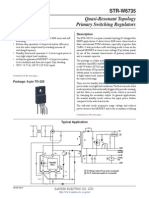
- Quasi-Resonant Topology Primary Switching Regulators: STR-W6735Documento13 páginasQuasi-Resonant Topology Primary Switching Regulators: STR-W6735perro sAinda não há avaliações
- Allegro STR-W6765 PDFDocumento15 páginasAllegro STR-W6765 PDFcomportAinda não há avaliações
- LMH6550 Differential, High Speed Op Amp: R R V V ADocumento25 páginasLMH6550 Differential, High Speed Op Amp: R R V V AJavier Felipe AlvaradoAinda não há avaliações
- LTM 4628Documento36 páginasLTM 4628Nelson LauAinda não há avaliações
- High Efficiency Low-Side N-Channel Controller For Switching RegulatorsDocumento33 páginasHigh Efficiency Low-Side N-Channel Controller For Switching Regulatorssoft4gsmAinda não há avaliações
- MCP 3909Documento44 páginasMCP 3909José HeinAinda não há avaliações
- Dual Quick-PWM Step-Down Controller With Low-Power LDO and RTC Regulator For MAIN SuppliesDocumento24 páginasDual Quick-PWM Step-Down Controller With Low-Power LDO and RTC Regulator For MAIN SuppliesReklama BielskoAinda não há avaliações
- LMC555 CMOS Timer: General Description FeaturesDocumento10 páginasLMC555 CMOS Timer: General Description FeaturesJeremy ObriotAinda não há avaliações
- U708Documento28 páginasU708Sol De GabrielAinda não há avaliações
- LM3530 High Efficiency White LED Driver With Programmable Ambient Light Sensing Capability and I C-Compatible InterfaceDocumento45 páginasLM3530 High Efficiency White LED Driver With Programmable Ambient Light Sensing Capability and I C-Compatible Interfacethoth2487Ainda não há avaliações
- Features Description: Ltc3536 1A Low Noise, Buck-Boost DC/DC ConverterDocumento28 páginasFeatures Description: Ltc3536 1A Low Noise, Buck-Boost DC/DC ConverternevdullAinda não há avaliações
- JX Variable Speed Drives DatasheetDocumento22 páginasJX Variable Speed Drives Datasheetamijoski6051Ainda não há avaliações
- TRANSMISSSION SYSTEM AND GENERATOR Power System Stabilizer PDFDocumento8 páginasTRANSMISSSION SYSTEM AND GENERATOR Power System Stabilizer PDFRamakrishnaAinda não há avaliações
- Voltage Regulators - AVR 04-2017Documento4 páginasVoltage Regulators - AVR 04-2017S G BavishkumarAinda não há avaliações
- STR W6735Documento14 páginasSTR W6735proctepAinda não há avaliações
- Off-Line Quasi-Resonant Switching Regulators: STR-X6769Documento9 páginasOff-Line Quasi-Resonant Switching Regulators: STR-X6769Alfredo Valencia RodriguezAinda não há avaliações
- MD2278 DDocumento3 páginasMD2278 Dhoangmanh1989Ainda não há avaliações
- STR W6735 DatasheetDocumento13 páginasSTR W6735 DatasheetloagerAinda não há avaliações
- ENG SS LDM-1000 Operation Manual ADocumento11 páginasENG SS LDM-1000 Operation Manual AGunandar GunandarAinda não há avaliações
- Low-Power, 12-Bit Voltage-Output Dacs With Serial InterfaceDocumento16 páginasLow-Power, 12-Bit Voltage-Output Dacs With Serial InterfaceMarcelo FerreiraAinda não há avaliações
- UC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllerDocumento15 páginasUC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllertoajuiceAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsNo EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsNota: 3.5 de 5 estrelas3.5/5 (6)
- Analog Circuit Design Volume Three: Design Note CollectionNo EverandAnalog Circuit Design Volume Three: Design Note CollectionNota: 3 de 5 estrelas3/5 (2)
- Chapter 5-Drillstem TestDocumento156 páginasChapter 5-Drillstem TestShalihan MustafaAinda não há avaliações
- 8 The Application of Deep Sea Water PDFDocumento7 páginas8 The Application of Deep Sea Water PDFGraci AngelAinda não há avaliações
- Pdra 23082022Documento2 páginasPdra 23082022Ajmal SeemabAinda não há avaliações
- Qhse-Sop-054 Oil Spill PreventionDocumento14 páginasQhse-Sop-054 Oil Spill PreventionJust AabAinda não há avaliações
- Ieee Tie - 2Documento12 páginasIeee Tie - 2kdm007Ainda não há avaliações
- APPSC Municipal AE SyllabusDocumento4 páginasAPPSC Municipal AE SyllabusPrasanna KumarAinda não há avaliações
- Ieee C57.135 (2001)Documento50 páginasIeee C57.135 (2001)Daniel PaniaguaAinda não há avaliações
- Viskoziteee PDFDocumento8 páginasViskoziteee PDFKamil AytekinAinda não há avaliações
- EFS KitDocumento13 páginasEFS KitAmalia PrassAinda não há avaliações
- Requirements of EN 1838: Illuminance of 5 LX For Safety EquipmentDocumento2 páginasRequirements of EN 1838: Illuminance of 5 LX For Safety EquipmenttestonsanAinda não há avaliações
- C075 Aq SPC 0006 - 3Documento12 páginasC075 Aq SPC 0006 - 3Mingyu SongAinda não há avaliações
- The Bicol Development PlanDocumento49 páginasThe Bicol Development PlanGilbert MendozaAinda não há avaliações
- Boiler Water ConditioningDocumento3 páginasBoiler Water ConditioningShahin AfrozAinda não há avaliações
- 2102 - Vol - 2BDocumento7 páginas2102 - Vol - 2BSoumen KarAinda não há avaliações
- Bomag BMP8500Service Manual CompleteDocumento300 páginasBomag BMP8500Service Manual Completeampacparts80% (15)
- 820.9505.98 - Ge-Anleitung Medical Silver ML-MP380CSG enDocumento16 páginas820.9505.98 - Ge-Anleitung Medical Silver ML-MP380CSG endwi octavianiAinda não há avaliações
- Test Bank For Essentials of Biology 3rd Edition Sylvia MaderDocumento24 páginasTest Bank For Essentials of Biology 3rd Edition Sylvia MaderCharlesMorganyfde100% (40)
- Dokumentacja Wciągnika PDFDocumento24 páginasDokumentacja Wciągnika PDFmatianAinda não há avaliações
- QSL9 G91Documento2 páginasQSL9 G91Obdvietnam ServiceAinda não há avaliações
- Biodiesel Separation and Purification A ReviewDocumento7 páginasBiodiesel Separation and Purification A ReviewKarla SotoAinda não há avaliações
- SQT 200 - 250 Maintenace OperationDocumento179 páginasSQT 200 - 250 Maintenace Operationosteanu100% (4)
- Acid Plan in General Physics 1Documento5 páginasAcid Plan in General Physics 1Edralyn PamaniAinda não há avaliações
- 2011.07.05 Gasoline Engine Management System, DeNSODocumento4 páginas2011.07.05 Gasoline Engine Management System, DeNSOQuoc BaoAinda não há avaliações
- Maintenance Guide: SINO Series Electrolyte AnalyzerDocumento18 páginasMaintenance Guide: SINO Series Electrolyte AnalyzerRoniiAinda não há avaliações
- The Future of The Automobile Industry in India - McKinseyDocumento13 páginasThe Future of The Automobile Industry in India - McKinseyDhiraj KhotAinda não há avaliações
- Pump AuditDocumento5 páginasPump AuditHeri SulasionoAinda não há avaliações
- Series 219 SMT DIP: Surface Mount DIP Switch - Auto PlaceableDocumento2 páginasSeries 219 SMT DIP: Surface Mount DIP Switch - Auto Placeablejagadees21Ainda não há avaliações
- PhysicsDocumento2 páginasPhysicsSami AftabAinda não há avaliações
- JBL Sub140p ManualDocumento5 páginasJBL Sub140p ManualDiff DonAinda não há avaliações