Você também pode gostar
- Ventosas PDFDocumento1 páginaVentosas PDFJuan PlazaAinda não há avaliações
- Cuestionario Sobre Impacto AmbientalDocumento5 páginasCuestionario Sobre Impacto AmbientalJuan PlazaAinda não há avaliações
- Impacto AmbientalDocumento5 páginasImpacto AmbientalJuan PlazaAinda não há avaliações
- Cuestionario Sobre Impacto AmbientalDocumento5 páginasCuestionario Sobre Impacto AmbientalJuan PlazaAinda não há avaliações
- Actuador de GiroDocumento2 páginasActuador de GiroJuan PlazaAinda não há avaliações
- Oleohidráulica Básica y Diseño de CircuitosDocumento228 páginasOleohidráulica Básica y Diseño de Circuitosgeriquel6707100% (2)
- VentosasDocumento1 páginaVentosasJuan PlazaAinda não há avaliações
- Deber 1 Transferencia de CalorDocumento4 páginasDeber 1 Transferencia de CalorJuan PlazaAinda não há avaliações
- Ejercicios Polarización Del BJTDocumento1 páginaEjercicios Polarización Del BJTJuan PlazaAinda não há avaliações
- Practica 5Documento7 páginasPractica 5Juan PlazaAinda não há avaliações
- Calculo Bomba CentrifugaDocumento3 páginasCalculo Bomba CentrifugaJuan PlazaAinda não há avaliações
- Practica 4Documento4 páginasPractica 4Juan PlazaAinda não há avaliações
- Practica 6Documento3 páginasPractica 6Juan PlazaAinda não há avaliações
- Deber 1 Transferencia de CalorDocumento4 páginasDeber 1 Transferencia de CalorJuan PlazaAinda não há avaliações
- Introduccion ConceptosDocumento35 páginasIntroduccion ConceptosJuan PlazaAinda não há avaliações
- Practica 8Documento3 páginasPractica 8Juan PlazaAinda não há avaliações
- Idef 0Documento13 páginasIdef 0Juan PlazaAinda não há avaliações
- Tablas - Factores de Fricci (On para AguaDocumento15 páginasTablas - Factores de Fricci (On para AguaJuan PlazaAinda não há avaliações
- Diseño MecanicoDocumento10 páginasDiseño MecanicoJuan PlazaAinda não há avaliações
- Practica 3Documento3 páginasPractica 3Juan PlazaAinda não há avaliações
- Laboratorio1 - Mecanica de Fluidos 2 - Número de ReynoldsDocumento8 páginasLaboratorio1 - Mecanica de Fluidos 2 - Número de ReynoldsJuan PlazaAinda não há avaliações
- Programa Redes RamificadasDocumento6 páginasPrograma Redes RamificadasJuan PlazaAinda não há avaliações
- Practica 2 2Documento15 páginasPractica 2 2Juan PlazaAinda não há avaliações
- Deducción de La Formula Hasta 6to OrdenDocumento13 páginasDeducción de La Formula Hasta 6to OrdenJuan PlazaAinda não há avaliações
- Regresion PolinomialDocumento10 páginasRegresion PolinomialJuan PlazaAinda não há avaliações
- CEMENTACIÓNDocumento5 páginasCEMENTACIÓNJuan PlazaAinda não há avaliações
- Practica 2Documento6 páginasPractica 2Juan PlazaAinda não há avaliações
- Cuadratura de GaussDocumento4 páginasCuadratura de GaussJuan PlazaAinda não há avaliações
- UTILITARISMODocumento12 páginasUTILITARISMOJuan PlazaAinda não há avaliações
- Metodos NumericosDocumento5 páginasMetodos NumericosJuan PlazaAinda não há avaliações
- Clases Medios de Transmision NoviembreDocumento304 páginasClases Medios de Transmision NoviembreAndres felipe marinAinda não há avaliações
- Motores ElectricosDocumento10 páginasMotores ElectricosAndres EscobarAinda não há avaliações
- Resumen de ConexionesDocumento5 páginasResumen de ConexionesLEONEL Alonso GonzálezAinda não há avaliações
- Simbologia ElectricaDocumento10 páginasSimbologia ElectricaFernando AguilarAinda não há avaliações
- Lopez - Roberto - I-1 Investigación - Fundamentos de ElectricidadDocumento5 páginasLopez - Roberto - I-1 Investigación - Fundamentos de ElectricidadEDGARDO ENRIQUE PAREDES LOPEZAinda não há avaliações
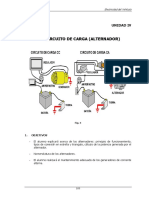
- Circuito de Carga (Alternador)Documento18 páginasCircuito de Carga (Alternador)HugoAinda não há avaliações
- GUIA U1 Ingeniería EléctricaDocumento19 páginasGUIA U1 Ingeniería EléctricaGaby BastetAinda não há avaliações
- EstatoresDocumento10 páginasEstatoresOsito Sebitas100% (2)
- IntroducciónDocumento37 páginasIntroducciónChino JordanAinda não há avaliações
- Manual de Servicio EV100 PDFDocumento88 páginasManual de Servicio EV100 PDFcolive171% (7)
- Resolucion Del Examen de Maquinas ElectricasDocumento23 páginasResolucion Del Examen de Maquinas ElectricasDavid BlancosAinda não há avaliações
- Formulas Motor Asincrono Trifasico v.2.0 2015-16Documento4 páginasFormulas Motor Asincrono Trifasico v.2.0 2015-16Jaume RequenaAinda não há avaliações
- Manua de Usuario Arrancador Electronico Estatico Modelo Pe-StartDocumento22 páginasManua de Usuario Arrancador Electronico Estatico Modelo Pe-Startajcl1980% (5)
- Laboratorio 4 Circuitos Diodo ZenerDocumento7 páginasLaboratorio 4 Circuitos Diodo ZenerRhoy LopezAinda não há avaliações
- Esquemas TípicosDocumento131 páginasEsquemas TípicosDaniel AponteAinda não há avaliações
- Ferrer Nilda 51560: Factura N°: 11245007 27/05/2021 Emitida El: Codigo de Pagos Link/BanelcoDocumento1 páginaFerrer Nilda 51560: Factura N°: 11245007 27/05/2021 Emitida El: Codigo de Pagos Link/BanelcoSoledad LedesmaAinda não há avaliações
- Modulo 1.2 Electricidad y MagnetismoDocumento21 páginasModulo 1.2 Electricidad y MagnetismotimbancheAinda não há avaliações
- Memoria Descriptiva MT SENCICO YANAHUARADocumento42 páginasMemoria Descriptiva MT SENCICO YANAHUARADaniel Alonzo Bustíos GuillénAinda não há avaliações
- Informe - 8 - Motor Jaula de ArdillaDocumento12 páginasInforme - 8 - Motor Jaula de ArdillaMatías Álvarez CáceresAinda não há avaliações
- 1 - Memorias de Calculo - Boris VelaidesDocumento16 páginas1 - Memorias de Calculo - Boris VelaidesTatiana MantillaAinda não há avaliações
- Informe 1 Maquinas 3Documento15 páginasInforme 1 Maquinas 3Henry PuquioAinda não há avaliações
- Laboratorio Nro 2 MERactualizadoDocumento8 páginasLaboratorio Nro 2 MERactualizadoDarwin ManriqueAinda não há avaliações
- Calculo de TarifaDocumento6 páginasCalculo de TarifaJames Castillo GasteloAinda não há avaliações
- Manual Inversor Must 5000W Mppt80aDocumento28 páginasManual Inversor Must 5000W Mppt80asektor03Ainda não há avaliações
- Activida 3Documento3 páginasActivida 3Angelica AtoyAinda não há avaliações
- Circuito Equivalente Del Transformador-1Documento11 páginasCircuito Equivalente Del Transformador-1Juan DubónAinda não há avaliações
- Capítulo 8 - Potencia Eléctrica en CADocumento39 páginasCapítulo 8 - Potencia Eléctrica en CAJonathan DvbbsAinda não há avaliações
- RESUMEN - Corriente y Resistencia Eléctrica - EQUIPO - 4Documento11 páginasRESUMEN - Corriente y Resistencia Eléctrica - EQUIPO - 4Ramon CaraballoAinda não há avaliações
- Conexión de Transformadores Monofásicos - Laboratorio N.4Documento13 páginasConexión de Transformadores Monofásicos - Laboratorio N.4hmacrAinda não há avaliações