Você também pode gostar
- Inverse LaplaceDocumento12 páginasInverse LaplaceΜΙΚΕ ΖΥΡAinda não há avaliações
- Laplace TransformDocumento14 páginasLaplace TransformPete BasAinda não há avaliações
- Unit 6 Laplace Transfrom Method: Structure NoDocumento46 páginasUnit 6 Laplace Transfrom Method: Structure NoJAGANNATH PRASADAinda não há avaliações
- Laplace Transformation PDFDocumento114 páginasLaplace Transformation PDFHector Ledesma III100% (1)
- Invlap, KDocumento10 páginasInvlap, KMohamed AdelAinda não há avaliações
- The Transform and Its Inverse: PrerequisitesDocumento23 páginasThe Transform and Its Inverse: PrerequisitesasmitajashAinda não há avaliações
- Laplace Transforms: N N N N N NDocumento7 páginasLaplace Transforms: N N N N N NdialauchennaAinda não há avaliações
- Application of Laplace TransformDocumento35 páginasApplication of Laplace TransformSingappuli100% (1)
- Laplace and Inverse TransformsDocumento40 páginasLaplace and Inverse TransformsDheerajOmprasadAinda não há avaliações
- TransformationsDocumento34 páginasTransformationsRigo Martinez MAinda não há avaliações
- LaplaceDocumento13 páginasLaplaceMuhammad UmairAinda não há avaliações
- Kendall NumtreatDocumento12 páginasKendall NumtreatallinacAinda não há avaliações
- La Place TransformDocumento8 páginasLa Place Transformreliance2012Ainda não há avaliações
- Laplace TransformDocumento30 páginasLaplace TransformkreposAinda não há avaliações
- MAT231BT - Laplace TransformsDocumento25 páginasMAT231BT - Laplace TransformsRochakAinda não há avaliações
- Laplace Transformations 2Documento26 páginasLaplace Transformations 2Soumyadeep MajumdarAinda não há avaliações
- Unit-III Laplace TransformDocumento30 páginasUnit-III Laplace TransformRochakAinda não há avaliações
- Laplace Transforms - ASUDocumento15 páginasLaplace Transforms - ASUApurva JoshiAinda não há avaliações
- EM806 PDocumento12 páginasEM806 PHolysterBob GasconAinda não há avaliações
- Introduction To The Laplace TransformDocumento40 páginasIntroduction To The Laplace TransformAndra FlorentinaAinda não há avaliações
- Laplace and Fourier Transforms: P.C. Chau, UCSD C 2000Documento2 páginasLaplace and Fourier Transforms: P.C. Chau, UCSD C 2000MachodogAinda não há avaliações
- Laplace Transform IntuitionDocumento5 páginasLaplace Transform IntuitionEvan AllenAinda não há avaliações
- Laplace Transformation NotesDocumento26 páginasLaplace Transformation NotesVijayalakshmi MuraliAinda não há avaliações
- Laplace Transform - Aminul Haque, 2224EEE00222Documento25 páginasLaplace Transform - Aminul Haque, 2224EEE00222Ãmîñûł Hãqûê AHAinda não há avaliações
- AdvMath (Unit 2)Documento24 páginasAdvMath (Unit 2)Ivan Paul SyAinda não há avaliações
- Laplace by Chandra 150831190012 Lva1 App6892 PDFDocumento20 páginasLaplace by Chandra 150831190012 Lva1 App6892 PDFjucar fernandezAinda não há avaliações
- Study of Laplace Transform AND It'S ApplicationsDocumento20 páginasStudy of Laplace Transform AND It'S Applicationsjucar fernandezAinda não há avaliações
- Worktext in Advanced MathematicsDocumento164 páginasWorktext in Advanced MathematicsCharmaine CuynoAinda não há avaliações
- Ch7 PDFDocumento63 páginasCh7 PDF王大洋Ainda não há avaliações
- Week 3 - Laplace TransformDocumento8 páginasWeek 3 - Laplace TransformSwfian ۦۦAinda não há avaliações
- Fractional Fourier Transform: Introduction and ExplorationDocumento11 páginasFractional Fourier Transform: Introduction and ExplorationIan Hoover100% (1)
- All About TransformsDocumento12 páginasAll About Transformsladida1234567Ainda não há avaliações
- Notes LT1Documento21 páginasNotes LT1deathesAinda não há avaliações
- Laplace Transform - Aminul Haque, 2224EEE00222Documento25 páginasLaplace Transform - Aminul Haque, 2224EEE00222Ãmîñûł Hãqûê AHAinda não há avaliações
- 03 01 Laplace Transforms Slides HandoutDocumento57 páginas03 01 Laplace Transforms Slides HandoutXavimVXS100% (2)
- Engineering Mathematics 1 Transform Functions: QuestionsDocumento20 páginasEngineering Mathematics 1 Transform Functions: QuestionsSyahrul SulaimanAinda não há avaliações
- Laplace Transform Lecture NotesDocumento44 páginasLaplace Transform Lecture NotesAmpumuza MmukundaAinda não há avaliações
- EMTH202-Lecture 13 (20-03-2023)Documento25 páginasEMTH202-Lecture 13 (20-03-2023)Naledi KetlogetsweAinda não há avaliações
- Laplace TransformDocumento35 páginasLaplace TransformBravo AagAinda não há avaliações
- Laplace Periodic SolutionsDocumento4 páginasLaplace Periodic SolutionsasbadgAinda não há avaliações
- 1 1 1 1 Topic Topic Topic Topic: Laplace Transforms Laplace Transforms Laplace Transforms Laplace TransformsDocumento27 páginas1 1 1 1 Topic Topic Topic Topic: Laplace Transforms Laplace Transforms Laplace Transforms Laplace TransformsManpreet SinghAinda não há avaliações
- Entire Course Material All Files Combined For 2011 FinalDocumento191 páginasEntire Course Material All Files Combined For 2011 FinalFinian MassaAinda não há avaliações
- Further Laplace Transforms: PrerequisitesDocumento15 páginasFurther Laplace Transforms: PrerequisitesAnshika WaliaAinda não há avaliações
- Advanced Engineering MathematicsDocumento28 páginasAdvanced Engineering MathematicsNyrl TavitaAinda não há avaliações
- Def - Laplace TransformDocumento4 páginasDef - Laplace Transformمحمد أشرف حسنAinda não há avaliações
- Laplace DerivativesDocumento18 páginasLaplace DerivativesSerdar BilgeAinda não há avaliações
- InstructionsDocumento9 páginasInstructionsapi-284738200Ainda não há avaliações
- Laplace Transforms1Documento110 páginasLaplace Transforms1nileshsawAinda não há avaliações
- Title Lorem Ipsum: Laplace TransformationDocumento33 páginasTitle Lorem Ipsum: Laplace TransformationQAMMER ILYASAinda não há avaliações
- Laplace TransformDocumento2 páginasLaplace TransformDaniel SolomonAinda não há avaliações
- ID8565Documento13 páginasID8565Firii SolomoonAinda não há avaliações
- 20 3 FRTHR Laplce TrnsformsDocumento10 páginas20 3 FRTHR Laplce Trnsformsfatcode27Ainda não há avaliações
- Convolution and Equidistribution: Sato-Tate Theorems for Finite-Field Mellin Transforms (AM-180)No EverandConvolution and Equidistribution: Sato-Tate Theorems for Finite-Field Mellin Transforms (AM-180)Ainda não há avaliações
- Elgenfunction Expansions Associated with Second Order Differential EquationsNo EverandElgenfunction Expansions Associated with Second Order Differential EquationsAinda não há avaliações
- Operational Calculus in Two Variables and Its ApplicationsNo EverandOperational Calculus in Two Variables and Its ApplicationsAinda não há avaliações
- 10 Useful Websites For Those Interested in Electronics!Documento5 páginas10 Useful Websites For Those Interested in Electronics!Christian John FernandezAinda não há avaliações
- Alexan Prodlist2012Documento56 páginasAlexan Prodlist2012Ivan Paul SyAinda não há avaliações
- Solar Powered LED Lamp CircuitDocumento10 páginasSolar Powered LED Lamp CircuitChristian John FernandezAinda não há avaliações
- Top Post: Windows 8.1 Pro RTM X64-X86 Bit ISO English With Activation DownloadDocumento20 páginasTop Post: Windows 8.1 Pro RTM X64-X86 Bit ISO English With Activation DownloadChristian John FernandezAinda não há avaliações
- Voltage Monitor For Car's Battery and Its Charging System - Embedded LabDocumento23 páginasVoltage Monitor For Car's Battery and Its Charging System - Embedded LabChristian John FernandezAinda não há avaliações
- Laplace in VDocumento7 páginasLaplace in VChristian John FernandezAinda não há avaliações
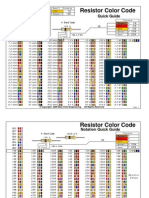
- Resistencias Codigo Colores PDFDocumento2 páginasResistencias Codigo Colores PDF'Cesar Guel81% (16)
- Inverse Laplace TransformsDocumento4 páginasInverse Laplace TransformsChristian John FernandezAinda não há avaliações
- TangentDocumento1 páginaTangentChristian John FernandezAinda não há avaliações
- The Inverse Laplace Transform: 25.1 Basic NotionsDocumento12 páginasThe Inverse Laplace Transform: 25.1 Basic NotionsChristian John FernandezAinda não há avaliações
- Father's Love LetterDocumento1 páginaFather's Love LetterMatthew100% (53)
- 2N3903-2N3904 MotorolaDocumento8 páginas2N3903-2N3904 MotorolaLaAngelitaOropezaAinda não há avaliações
- 6 Transform-Domain Approaches: 6.1 MotivationDocumento46 páginas6 Transform-Domain Approaches: 6.1 MotivationCHARLES MATHEWAinda não há avaliações
- Signals and Systems: Laboratory ManualDocumento4 páginasSignals and Systems: Laboratory ManualFakhar AbbasppAinda não há avaliações
- Mathematical Techniques: OxfordDocumento11 páginasMathematical Techniques: OxfordMartín FigueroaAinda não há avaliações
- EET201 CN Lecture Notes Full PDFDocumento151 páginasEET201 CN Lecture Notes Full PDFManu CR SevenAinda não há avaliações
- Ch4.Laplace Transform and Circuit AnalysisDocumento61 páginasCh4.Laplace Transform and Circuit AnalysisamirAinda não há avaliações
- BIT SINDRI, CSE SyllabusDocumento36 páginasBIT SINDRI, CSE SyllabusNikhil Surya Mukhi100% (1)
- Nagpur University All Years SyllabusDocumento31 páginasNagpur University All Years SyllabusAjit PaswanAinda não há avaliações
- Narayana Engineering College:: Gudur Department of Ece II B.TECH (2014-15) I SEM Sub: PTSP Unit - I Probability & The Random VariableDocumento6 páginasNarayana Engineering College:: Gudur Department of Ece II B.TECH (2014-15) I SEM Sub: PTSP Unit - I Probability & The Random VariablemanikrishnaswamyAinda não há avaliações
- DYNA 1001 Engineering Systems Dynamics Lecture 8 Transfer FunctionDocumento27 páginasDYNA 1001 Engineering Systems Dynamics Lecture 8 Transfer FunctionMachel GiftAinda não há avaliações
- First Semester 2019-2020 Course Handout (Part II) : Krishnendra ShekhawatDocumento5 páginasFirst Semester 2019-2020 Course Handout (Part II) : Krishnendra ShekhawatRohan AnandAinda não há avaliações
- Control Systems: Gate ClassesDocumento54 páginasControl Systems: Gate ClassesTahmid ShihabAinda não há avaliações
- Laplace TransformDocumento13 páginasLaplace Transformh6j4vsAinda não há avaliações
- Chapter 2 Modeling in The Frequency DomainDocumento3 páginasChapter 2 Modeling in The Frequency DomainJoy Rizki Pangestu DjuansjahAinda não há avaliações
- New Microsoft Word DocumentDocumento163 páginasNew Microsoft Word DocumentPrahlad Reddy100% (1)
- Engineering Mathematics GateDocumento2 páginasEngineering Mathematics Gateupendra35Ainda não há avaliações
- Laplace Transform: F (P) F (T) DTDocumento4 páginasLaplace Transform: F (P) F (T) DTmarkjoessethAinda não há avaliações
- Department: Mathematics Date & Time of Exam: 05.07.2021 Sub Code: Mair22 DURATION: 2 Hours Faculty Name: Dr. Atul Kumar Verma / Dr. M SivanesanDocumento2 páginasDepartment: Mathematics Date & Time of Exam: 05.07.2021 Sub Code: Mair22 DURATION: 2 Hours Faculty Name: Dr. Atul Kumar Verma / Dr. M SivanesanBharathi VedhanandamAinda não há avaliações
- Handout SASDocumento2 páginasHandout SASJeswin EldhoAinda não há avaliações
- Chapter56 Laplace&TFDocumento106 páginasChapter56 Laplace&TFfebri setyawanAinda não há avaliações
- Jerzy Rutkowski - Circuit TheoryDocumento311 páginasJerzy Rutkowski - Circuit TheoryArtur NowakAinda não há avaliações
- Assignment 1 ProblemsDocumento2 páginasAssignment 1 ProblemsGeorge KAinda não há avaliações
- Fuzzy Control Systems - (Ch5 of Dynamics of Controlled Systems)Documento322 páginasFuzzy Control Systems - (Ch5 of Dynamics of Controlled Systems)Cassandra Sandoval100% (1)
- Tezpur University BTech (Mechanical Engineering) Syllabus FDocumento41 páginasTezpur University BTech (Mechanical Engineering) Syllabus FRajkamal ChoudharyAinda não há avaliações
- Lab 4 QUBE-Servo Bump Test Modeling Workbook (Student)Documento6 páginasLab 4 QUBE-Servo Bump Test Modeling Workbook (Student)Luis EnriquezAinda não há avaliações
- Signals and Systems - P. R. RaoDocumento202 páginasSignals and Systems - P. R. RaoShirish RansingAinda não há avaliações
- Irwin, Engineering Circuit Analysis, 11e ISV Chapter 14Documento123 páginasIrwin, Engineering Circuit Analysis, 11e ISV Chapter 14이잉Ainda não há avaliações
- SyllabusDocumento83 páginasSyllabusafreen babaAinda não há avaliações
- Laplace's Approximation of The Gamma FunctionDocumento6 páginasLaplace's Approximation of The Gamma FunctionTomislav PetrušijevićAinda não há avaliações
- 2130002Documento19 páginas2130002ahmadfarrizAinda não há avaliações
- USN 17MAT21: Model Question Paper With Effect From 2017-18Documento3 páginasUSN 17MAT21: Model Question Paper With Effect From 2017-18VyshnaviAinda não há avaliações