Você também pode gostar
- ME (Information Technology) 2017 Syllabus - 14-7-17 PDFDocumento80 páginasME (Information Technology) 2017 Syllabus - 14-7-17 PDFanbhute3484Ainda não há avaliações
- Final Version - TE - IT - Syllabus - 2015 - Course PDFDocumento61 páginasFinal Version - TE - IT - Syllabus - 2015 - Course PDFanbhute3484Ainda não há avaliações
- Quantitative Techniques in ManagementDocumento16 páginasQuantitative Techniques in Managementanbhute3484Ainda não há avaliações
- Data Science and Big Data AnalyticsDocumento2 páginasData Science and Big Data Analyticsanbhute3484Ainda não há avaliações
- Best First RTutorialDocumento17 páginasBest First RTutorialfrancobeckham23Ainda não há avaliações
- Four Pillars of Communication Speaking SkillsDocumento47 páginasFour Pillars of Communication Speaking Skillsanbhute3484100% (1)
- ESDL Lab ManualDocumento7 páginasESDL Lab Manualanbhute3484Ainda não há avaliações
- MODROBSDocumento24 páginasMODROBSanbhute348450% (2)
- Four Pillars of Communication Listening SkillsDocumento35 páginasFour Pillars of Communication Listening Skillsanbhute3484Ainda não há avaliações
- RPSDocumento37 páginasRPSkarthik111082dAinda não há avaliações
- Scheme OF Nationally Coordinated Project: All India Council For Technical EducationDocumento36 páginasScheme OF Nationally Coordinated Project: All India Council For Technical Educationjayahar2003Ainda não há avaliações
- All India Council For Technical Education: Scheme OF Industry Institute Partnership Cell (IIPC)Documento31 páginasAll India Council For Technical Education: Scheme OF Industry Institute Partnership Cell (IIPC)anuj_agrawalAinda não há avaliações
- Conference BrochureDocumento2 páginasConference Brochureanbhute3484Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Sample 5th Grade Lesson PlanDocumento2 páginasSample 5th Grade Lesson PlanJune Lee CamarinAinda não há avaliações
- Solved Problems - Continuous Random VariablesDocumento4 páginasSolved Problems - Continuous Random VariablesDahanyakage WickramathungaAinda não há avaliações
- The Impact of Firm Growth On Stock Returns of Nonfinancial Firms Listed On Egyptian Stock ExchangeDocumento17 páginasThe Impact of Firm Growth On Stock Returns of Nonfinancial Firms Listed On Egyptian Stock Exchangealma kalyaAinda não há avaliações
- Numerical Methods PPT AYUSH MISHRADocumento11 páginasNumerical Methods PPT AYUSH MISHRAsubscribe.us100Ainda não há avaliações
- Download: Coulomb Force (Static) Vocabulary: Prior Knowledge Questions (Do These BEFORE Using The Gizmo.)Documento3 páginasDownload: Coulomb Force (Static) Vocabulary: Prior Knowledge Questions (Do These BEFORE Using The Gizmo.)Xavier McCulloughAinda não há avaliações
- Gate Best QuestionsDocumento17 páginasGate Best QuestionsAnmolKumarAinda não há avaliações
- Burning Rate Propeling ChargeDocumento5 páginasBurning Rate Propeling ChargeFira Putri WulandariAinda não há avaliações
- N6 Control Systems August 2018Documento14 páginasN6 Control Systems August 2018lechutnmAinda não há avaliações
- Fundamentals of Neural NetworksDocumento62 páginasFundamentals of Neural NetworksDivya Aseeja100% (2)
- The Progress of Consolidation in A Clay Layer Increasing-Gibson PDFDocumento12 páginasThe Progress of Consolidation in A Clay Layer Increasing-Gibson PDFAnonymous GnfGTwAinda não há avaliações
- Rounding PDFDocumento1 páginaRounding PDFfajar081Ainda não há avaliações
- Real Time DC Motor Speed Control Using Pid in Labview With ArduinoDocumento3 páginasReal Time DC Motor Speed Control Using Pid in Labview With ArduinoabsalnabiAinda não há avaliações
- Problem Set #5 Solutions: CopolymerizationDocumento10 páginasProblem Set #5 Solutions: Copolymerizationmuzammil hussainAinda não há avaliações
- 5.2 Orthogonal Complements and ProjectionsDocumento17 páginas5.2 Orthogonal Complements and ProjectionsCostalotAinda não há avaliações
- Optimal Agricultural Land Use: An Efficient Neutrosophic Linear Programming MethodDocumento7 páginasOptimal Agricultural Land Use: An Efficient Neutrosophic Linear Programming MethodScience DirectAinda não há avaliações
- BlastingAKRaina Flyrock Factor of Safety Based Risk AnalysisDocumento14 páginasBlastingAKRaina Flyrock Factor of Safety Based Risk Analysisshaik sakeemAinda não há avaliações
- Aits 2021 FT Ix Jeem.Documento16 páginasAits 2021 FT Ix Jeem.Atharv AtoleAinda não há avaliações
- Graph Homomorphisms: Open Problems: L Aszl o Lov Asz June 2008Documento10 páginasGraph Homomorphisms: Open Problems: L Aszl o Lov Asz June 2008vanaj123Ainda não há avaliações
- AS 3600-2018 RC-PN Example 001Documento4 páginasAS 3600-2018 RC-PN Example 001Aashu chaudharyAinda não há avaliações
- The Undiscovered Self - Carl Gustav JungDocumento25 páginasThe Undiscovered Self - Carl Gustav JungYusuf IrawanAinda não há avaliações
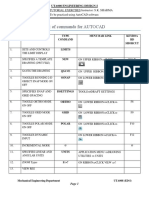
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocumento15 páginasList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelAinda não há avaliações
- An Improved Method For Grinding Mill Filling Measurement and TheDocumento9 páginasAn Improved Method For Grinding Mill Filling Measurement and Thehasan70 sheykhiAinda não há avaliações
- Phet Alpha DecayDocumento2 páginasPhet Alpha DecayAndika Sanjaya100% (1)
- Optimum Design PrinciplesDocumento3 páginasOptimum Design PrinciplesJen Chavez100% (1)
- Corporate Tax Avoidance and Performance: Evidence From China's Listed CompaniesDocumento23 páginasCorporate Tax Avoidance and Performance: Evidence From China's Listed CompaniesReynardo GosalAinda não há avaliações
- 9 - 28 - 0 - 0 - 40 - 5th Electrical DE&MPDocumento165 páginas9 - 28 - 0 - 0 - 40 - 5th Electrical DE&MPvijay kumar GuptaAinda não há avaliações
- Le y Yang - Tiny ImageNet Visual Recognition ChallengeDocumento6 páginasLe y Yang - Tiny ImageNet Visual Recognition Challengemusicalización pacíficoAinda não há avaliações
- Unit 4 - Continuous Random VariablesDocumento35 páginasUnit 4 - Continuous Random VariablesShouq AbdullahAinda não há avaliações
- Acoustics Lab: Selected Topics On Acoustics-CommunicationDocumento138 páginasAcoustics Lab: Selected Topics On Acoustics-CommunicationHeba Noweir100% (1)
- PPAP ChecklistDocumento4 páginasPPAP ChecklistHirbod HirmandAinda não há avaliações