Você também pode gostar
- Experiência7 PDFDocumento12 páginasExperiência7 PDFRicardo JuniorAinda não há avaliações
- Experiência5 PDFDocumento12 páginasExperiência5 PDFRicardo JuniorAinda não há avaliações
- Experiência6 PDFDocumento12 páginasExperiência6 PDFRicardo JuniorAinda não há avaliações
- Experiência3 PDFDocumento10 páginasExperiência3 PDFRicardo JuniorAinda não há avaliações
- Experiência4 PDFDocumento11 páginasExperiência4 PDFRicardo JuniorAinda não há avaliações
- Experiência2 PDFDocumento10 páginasExperiência2 PDFRicardo JuniorAinda não há avaliações
- Experiência 1Documento8 páginasExperiência 1eliasportellaAinda não há avaliações
- Apostila PIC C18 PDFDocumento118 páginasApostila PIC C18 PDFRicardo JuniorAinda não há avaliações
- Experiência3 PDFDocumento10 páginasExperiência3 PDFRicardo JuniorAinda não há avaliações
- Experiência5 PDFDocumento12 páginasExperiência5 PDFRicardo JuniorAinda não há avaliações
- Experiência6 PDFDocumento12 páginasExperiência6 PDFRicardo JuniorAinda não há avaliações
- Experiência2 PDFDocumento10 páginasExperiência2 PDFRicardo JuniorAinda não há avaliações
- Experiência4 PDFDocumento11 páginasExperiência4 PDFRicardo JuniorAinda não há avaliações
- Experiência 1Documento8 páginasExperiência 1eliasportellaAinda não há avaliações
- Apostila PIC C18 PDFDocumento118 páginasApostila PIC C18 PDFRicardo JuniorAinda não há avaliações
- Inspiron 11 3168 2 in 1 Laptop - Setup Guide - PT BRDocumento24 páginasInspiron 11 3168 2 in 1 Laptop - Setup Guide - PT BREstevam Gomes de AzevedoAinda não há avaliações
- Tutorial Emulador ZsnesDocumento62 páginasTutorial Emulador ZsnesromeroeqAinda não há avaliações
- Asus M5a99x Evo Am3Documento13 páginasAsus M5a99x Evo Am3Luiz OtavioAinda não há avaliações
- Inventario Abril 2018 (3) VerificadoDocumento46 páginasInventario Abril 2018 (3) VerificadoMaikon GarciaAinda não há avaliações
- Atps RedesDocumento13 páginasAtps RedesAriel PereiraAinda não há avaliações
- Leila o 18189Documento20 páginasLeila o 18189Jaime JustinianoAinda não há avaliações
- 55fbc Quanta Bl6 Toshiba l650 UmaDocumento43 páginas55fbc Quanta Bl6 Toshiba l650 UmaValerică HizanuAinda não há avaliações
- Optiplex-780 - Service Manual - PT-PT PDFDocumento65 páginasOptiplex-780 - Service Manual - PT-PT PDFVanderlei Alves de OliveiraAinda não há avaliações
- Procedimento de ComunicaçãoDocumento24 páginasProcedimento de ComunicaçãoJorge Luiz Bastos FonsecaAinda não há avaliações
- AQT100: Especificações técnicas monitoramento industrialDocumento2 páginasAQT100: Especificações técnicas monitoramento industrialROberto cavacoAinda não há avaliações
- Tabela 19 03 12 UnicompDocumento64 páginasTabela 19 03 12 UnicompGuilherme AntunesAinda não há avaliações
- Atualização de firmware Samsung TV 2010Documento4 páginasAtualização de firmware Samsung TV 2010RicardoAinda não há avaliações
- Manual Rebonr PrimeiraDocumento30 páginasManual Rebonr PrimeiraBruno DalfiorAinda não há avaliações
- Instalar Windows 7 via pen driveDocumento76 páginasInstalar Windows 7 via pen driveDan RibeiroAinda não há avaliações
- Configuração Da Bios - TudoDocumento32 páginasConfiguração Da Bios - TudoEdgar ArturAinda não há avaliações
- Vocabulário Japonês - Computadores e Informatica - Suki DesuDocumento21 páginasVocabulário Japonês - Computadores e Informatica - Suki DesuIsrael Gomes de LimaAinda não há avaliações
- Porta ParalelaDocumento32 páginasPorta ParalelaGilson Mendes SilvaAinda não há avaliações
- Exercícios Arquitetura2Documento7 páginasExercícios Arquitetura2Luis Vitor MattosAinda não há avaliações
- Plano de Curso Montagem e Manutenção de Micro e NotebooksDocumento4 páginasPlano de Curso Montagem e Manutenção de Micro e NotebooksIgor FernandoAinda não há avaliações
- UntitledDocumento57 páginasUntitledSthefany RamalhoAinda não há avaliações
- Criar recuperação Dell Windows USBDocumento2 páginasCriar recuperação Dell Windows USBFilipe Pires BatistaAinda não há avaliações
- 05.2 - Arquitetura e Organização de Sistemas Computadorizados - Memória 1Documento49 páginas05.2 - Arquitetura e Organização de Sistemas Computadorizados - Memória 1Gabaritando - PreparatórioAinda não há avaliações
- Teclas BIOS NotebooksDocumento3 páginasTeclas BIOS NotebooksJúniorPereiraAinda não há avaliações
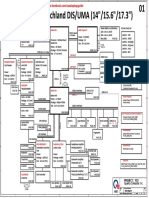
- HP Pavilion 15-p Quanta Y23 Y23a Vine Amd Richland Dis Uma (14'' 15.6'' 17.3'') Rev 1aDocumento41 páginasHP Pavilion 15-p Quanta Y23 Y23a Vine Amd Richland Dis Uma (14'' 15.6'' 17.3'') Rev 1auzenhoAinda não há avaliações
- Manual A55 MobDocumento47 páginasManual A55 Mob9tjj6275d6Ainda não há avaliações
- Painel digital para Buggy com Basic StampDocumento7 páginasPainel digital para Buggy com Basic StampanglosaxaoAinda não há avaliações
- 08gerencia de MemoriaDocumento23 páginas08gerencia de Memoriajoseamorim26Ainda não há avaliações
- Printer history log entriesDocumento63 páginasPrinter history log entriesAnonymous tAeYP07Ainda não há avaliações
- Controlador FE50RP: manual de operação otimizado paraDocumento8 páginasControlador FE50RP: manual de operação otimizado paraFernando CarvalhoAinda não há avaliações
- Gestão da manutenção com o SIGMADocumento26 páginasGestão da manutenção com o SIGMAsmarts777Ainda não há avaliações