Você também pode gostar
- Solution Manual for 100 Genesys Design Examples: Second EditionNo EverandSolution Manual for 100 Genesys Design Examples: Second EditionAinda não há avaliações
- Low Power VLSI Circuits QuestionsDocumento31 páginasLow Power VLSI Circuits QuestionsPallavi Ch71% (7)
- Introduction to Power System ProtectionNo EverandIntroduction to Power System ProtectionNota: 5 de 5 estrelas5/5 (1)
- Unit 2: Essential Physics of The MOSFET: Energy Band Diagram ReviewDocumento23 páginasUnit 2: Essential Physics of The MOSFET: Energy Band Diagram ReviewalAinda não há avaliações
- EI2301-IE - Unit 1 - Part A and Part B - With Answers PDFDocumento21 páginasEI2301-IE - Unit 1 - Part A and Part B - With Answers PDFsartpgitAinda não há avaliações
- VLSI V Lab N-1Documento20 páginasVLSI V Lab N-1Dhiraj PrakashAinda não há avaliações
- Ti - Mosfet Gate DriveDocumento40 páginasTi - Mosfet Gate Drivedownload_cruxAinda não há avaliações
- Mosfet PDFDocumento13 páginasMosfet PDFTad-electronics TadelectronicsAinda não há avaliações
- Power MosfetsDocumento17 páginasPower MosfetsKyaw SoeAinda não há avaliações
- CMOS Fabrication and Device Characterization ReportDocumento14 páginasCMOS Fabrication and Device Characterization ReportShafiq PanicKingAinda não há avaliações
- 01chapter 5-1Documento55 páginas01chapter 5-1AhmAinda não há avaliações
- Power MOSFET BasicsDocumento13 páginasPower MOSFET BasicsTim PriceAinda não há avaliações
- Application Note AN-1084: Power MOSFET BasicsDocumento13 páginasApplication Note AN-1084: Power MOSFET Basicshardcore18Ainda não há avaliações
- Microelectronic CircuitDocumento696 páginasMicroelectronic CircuitImtiaz AhmedAinda não há avaliações
- EEP851 POWER ELECTRONICS LAB- SCR, IGBT & MOSFET CHARACTERISTICSDocumento16 páginasEEP851 POWER ELECTRONICS LAB- SCR, IGBT & MOSFET CHARACTERISTICSGaurav Verma100% (2)
- Power MOSFET Basics: Structure, Operation Limits & SwitchingDocumento12 páginasPower MOSFET Basics: Structure, Operation Limits & SwitchingBrightchip TechnologiesAinda não há avaliações
- Understanding Power MosfetsDocumento5 páginasUnderstanding Power MosfetsIskander XandrosAinda não há avaliações
- 2007 - Sam Mandegaran - ABreakdownVoltageMultiplierforHighVoltageSwingDriv (Retrieved-2015-08-30)Documento11 páginas2007 - Sam Mandegaran - ABreakdownVoltageMultiplierforHighVoltageSwingDriv (Retrieved-2015-08-30)Miguel D. Diaz H.Ainda não há avaliações
- VLSI CAT2 SolvedDocumento13 páginasVLSI CAT2 SolvedTrinayan PathakAinda não há avaliações
- VLSI Design BasicsDocumento39 páginasVLSI Design BasicsNuniwal JyotiAinda não há avaliações
- Chapter 5 - Analog Integrated Circuit Design by John ChomaDocumento95 páginasChapter 5 - Analog Integrated Circuit Design by John ChomaAriana Ribeiro LameirinhasAinda não há avaliações
- Philips - High Voltage Bipolar TransistorDocumento41 páginasPhilips - High Voltage Bipolar TransistordanielsturzaAinda não há avaliações
- Light Triggering Thyristor For HVDC and Other Applications.Documento6 páginasLight Triggering Thyristor For HVDC and Other Applications.IDESAinda não há avaliações
- Assignment 3Documento7 páginasAssignment 3Arnon PukhrambamAinda não há avaliações
- Eee-Vii-Vlsi Circuits and Design (10ee764) - NotesDocumento225 páginasEee-Vii-Vlsi Circuits and Design (10ee764) - Notessammy100% (1)
- FinFET Inverter Anlaysis PDFDocumento14 páginasFinFET Inverter Anlaysis PDFRakeshAinda não há avaliações
- Unit 01Documento21 páginasUnit 01mathanstar77Ainda não há avaliações
- Fpe (1) AkDocumento39 páginasFpe (1) AkAnchal YewaleAinda não há avaliações
- Low Voltage Low Power Pipelined ADC For Video Applications: Hameed Zohaib Samad, Patri Sriharirao, K. SarangamDocumento5 páginasLow Voltage Low Power Pipelined ADC For Video Applications: Hameed Zohaib Samad, Patri Sriharirao, K. SarangamGayathri SrinivasaAinda não há avaliações
- Lectura 3 M PDFDocumento12 páginasLectura 3 M PDFFlakita S MelcOchitaAinda não há avaliações
- Chapter 1 Micro Electronics Circuit NotesDocumento59 páginasChapter 1 Micro Electronics Circuit NotesswamySLR100% (1)
- EC6601-VLSI Design 2 Mark QuestionsDocumento21 páginasEC6601-VLSI Design 2 Mark QuestionsArun ChezianAinda não há avaliações
- R07an0007ej0110 MosfetDocumento24 páginasR07an0007ej0110 Mosfetayoub.aitlahcen92Ainda não há avaliações
- Power IC in The SaddleDocumento12 páginasPower IC in The SaddleErminsul Vicuña SalasAinda não há avaliações
- VLSI Design: Dr. K. Srinivasa RaoDocumento39 páginasVLSI Design: Dr. K. Srinivasa Raoshen shahAinda não há avaliações
- Complete Vlsi NotesDocumento160 páginasComplete Vlsi NotesTarun SinghalAinda não há avaliações
- ADC Unit 2 LM MOSFET BJTDocumento37 páginasADC Unit 2 LM MOSFET BJTKeerthi SadhanaAinda não há avaliações
- Power BJT & MOSFETDocumento7 páginasPower BJT & MOSFETAsha DurafeAinda não há avaliações
- Modeling of SiC MOSFET in MatlabSimulinkDocumento5 páginasModeling of SiC MOSFET in MatlabSimulinkDaniel Labiano AnduezaAinda não há avaliações
- Sic Mos Trench SJ IET Circuits Devices Syst - 2020 - KotamrajuDocumento6 páginasSic Mos Trench SJ IET Circuits Devices Syst - 2020 - Kotamrajuterry chenAinda não há avaliações
- Mosfet en DetalleDocumento66 páginasMosfet en DetallecuervocrowAinda não há avaliações
- A Novel TFET StructureDocumento23 páginasA Novel TFET StructureRohith ChowdaryAinda não há avaliações
- Vlsi Group-B Q&aDocumento13 páginasVlsi Group-B Q&aROHAN CHOWDHURYAinda não há avaliações
- Vlsi Design: (EL-486) For B.E (EL)Documento33 páginasVlsi Design: (EL-486) For B.E (EL)Deepak PatelAinda não há avaliações
- MOSFET-Only Switched-Capacitor Circuits in Digital CMOS TechnologyDocumento14 páginasMOSFET-Only Switched-Capacitor Circuits in Digital CMOS Technologyfabien33Ainda não há avaliações
- VLSI Intro: Metal-Oxide SemiconductorsDocumento32 páginasVLSI Intro: Metal-Oxide SemiconductorssivaAinda não há avaliações
- MosfetDocumento13 páginasMosfetSristick100% (3)
- Design and Application Guide For High Speed MOSFET Gate Drive CircuitsDocumento37 páginasDesign and Application Guide For High Speed MOSFET Gate Drive CircuitswewAinda não há avaliações
- Dheeraj ReportDocumento15 páginasDheeraj ReportGirdhar Gopal GautamAinda não há avaliações
- Vincotech Layout 1Documento5 páginasVincotech Layout 1Rajani Kumar ThirukoluriAinda não há avaliações
- Microelectronics Circuits Subject Code: 10EC63 VI Semester ECEDocumento59 páginasMicroelectronics Circuits Subject Code: 10EC63 VI Semester ECERubal Preet KaurAinda não há avaliações
- AN211 FET Teory and PracticeDocumento12 páginasAN211 FET Teory and PracticefabirznAinda não há avaliações
- MosfetDocumento20 páginasMosfetMohammad Rameez100% (2)
- MOS Integrated Circuit DesignNo EverandMOS Integrated Circuit DesignE. WolfendaleAinda não há avaliações
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Ainda não há avaliações
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingNo EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingAinda não há avaliações
- Introduction to Power System ProtectionNo EverandIntroduction to Power System ProtectionAinda não há avaliações
- An Essential Guide to Electronic Material Surfaces and InterfacesNo EverandAn Essential Guide to Electronic Material Surfaces and InterfacesAinda não há avaliações
- Control SystemsDocumento105 páginasControl SystemsVenkatesan Satheeswaran100% (1)
- Programmable Logic Controllers: Basic Ladder Logic ProgrammingDocumento9 páginasProgrammable Logic Controllers: Basic Ladder Logic ProgrammingVenkatesan SatheeswaranAinda não há avaliações
- PLC HistoryDocumento10 páginasPLC HistoryBhaskar GRAinda não há avaliações
- Unit III MagnetostaticsDocumento14 páginasUnit III MagnetostaticsVenkatesan SatheeswaranAinda não há avaliações
- LECT03Documento9 páginasLECT03espeliarmunAinda não há avaliações
- Electromagnetic Field Theory Unit 1Documento32 páginasElectromagnetic Field Theory Unit 1Suzi MargretAinda não há avaliações
- Lect02 (PLC Basics) For DummiesDocumento10 páginasLect02 (PLC Basics) For DummiesAgung EchelonAinda não há avaliações
- Electromagnetic Fields Two Mark Questions and AnswersDocumento26 páginasElectromagnetic Fields Two Mark Questions and AnswersVenkatesan Satheeswaran100% (5)
- Solution of Boundary Value Problems in Different Coordinate SystemsDocumento33 páginasSolution of Boundary Value Problems in Different Coordinate SystemsVenkatesan Satheeswaran100% (1)
- Emf Iso Leeson PlanDocumento4 páginasEmf Iso Leeson PlanVenkatesan SatheeswaranAinda não há avaliações
- Nehru Institute of Technology: Coimbatore Lecture PlanDocumento2 páginasNehru Institute of Technology: Coimbatore Lecture PlanVenkatesan SatheeswaranAinda não há avaliações
- II Lab Manual FinalDocumento58 páginasII Lab Manual FinalVenkatesan SatheeswaranAinda não há avaliações
- Nehru Institute of Technology: Coimbatore Lecture PlanDocumento2 páginasNehru Institute of Technology: Coimbatore Lecture PlanVenkatesan SatheeswaranAinda não há avaliações
- Cs Ist Internal 2014Documento2 páginasCs Ist Internal 2014Venkatesan SatheeswaranAinda não há avaliações
- Over ClockingDocumento2 páginasOver ClockingVenkatesan SatheeswaranAinda não há avaliações
- Metal DetectorDocumento69 páginasMetal DetectorMaximilian Sylvester33% (3)
- ECE131 Basic Electrical Electronics ExamDocumento2 páginasECE131 Basic Electrical Electronics ExamHarsh RajAinda não há avaliações
- Motor Drive and Control SolutionsDocumento49 páginasMotor Drive and Control SolutionsthietdaucongAinda não há avaliações
- SM4364NAKPDocumento13 páginasSM4364NAKPMohamed MansourAinda não há avaliações
- GaN Power Device Tutorial Part2 GaN DrivingDocumento63 páginasGaN Power Device Tutorial Part2 GaN DrivingdjyAinda não há avaliações
- A3921 Datasheet PDFDocumento21 páginasA3921 Datasheet PDFSajid AliAinda não há avaliações
- Linear and Digital Appilications LabDocumento66 páginasLinear and Digital Appilications LabThomaselvaAinda não há avaliações
- MS-Micro Electronics SyllabusDocumento19 páginasMS-Micro Electronics SyllabusUpendra KumarAinda não há avaliações
- Ece532 Pres Ekv BsimDocumento29 páginasEce532 Pres Ekv BsimKenneth Palma CarmonaAinda não há avaliações
- Lessonplan Basic Electronics 18ELN24Documento6 páginasLessonplan Basic Electronics 18ELN24VinnuhcAinda não há avaliações
- Advanced Power Electronics Corp.: AP73T03GH/J-HFDocumento4 páginasAdvanced Power Electronics Corp.: AP73T03GH/J-HFAntero RafaelAinda não há avaliações
- MECHANICAL ENGINEERING QUESTION BANK ON ELECTRONICS AND MICROPROCESSORSDocumento6 páginasMECHANICAL ENGINEERING QUESTION BANK ON ELECTRONICS AND MICROPROCESSORSJagdish AdikesavanAinda não há avaliações
- A 1.5-V, 1.5-GHz CMOS Low Noise AmplifierDocumento15 páginasA 1.5-V, 1.5-GHz CMOS Low Noise AmplifierMohammad MousavikAinda não há avaliações
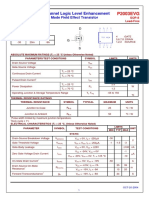
- P2003EVG Niko-Sem: P-Channel Logic Level EnhancementDocumento5 páginasP2003EVG Niko-Sem: P-Channel Logic Level EnhancementNeto CunhaAinda não há avaliações
- Analog Input, Output, and Relay Drive Output Module For Smart Grid IedsDocumento77 páginasAnalog Input, Output, and Relay Drive Output Module For Smart Grid IedsBala Raju ReddyboyaAinda não há avaliações
- VLSI Lab CompendiumDocumento52 páginasVLSI Lab CompendiumSaad Ali Khan SherwaniAinda não há avaliações
- TMS3705 Transponder Base Station IC: 1 Device OverviewDocumento28 páginasTMS3705 Transponder Base Station IC: 1 Device OverviewwillseeseewillAinda não há avaliações
- Comparison of partially and fully depleted SOI transistors down to sub-50nmDocumento1 páginaComparison of partially and fully depleted SOI transistors down to sub-50nmNazmul HasanAinda não há avaliações
- 12NK90Documento13 páginas12NK90Iwan YogyaAinda não há avaliações
- Physics of The Ignition System PDFDocumento10 páginasPhysics of The Ignition System PDFmeetbalakumar100% (1)
- K 2961Documento7 páginasK 2961HenryAmayaLarrealAinda não há avaliações
- Application Notes UC3710TDocumento16 páginasApplication Notes UC3710TSHAHID_71Ainda não há avaliações
- N-Channel Vertical DMOS FET Spec SheetDocumento3 páginasN-Channel Vertical DMOS FET Spec SheetThe ProgrammerAinda não há avaliações
- RF Device DataDocumento1.388 páginasRF Device Datasergecheshut100% (2)
- Transistores Como InterruptoresDocumento18 páginasTransistores Como InterruptoresSayuri CastellanosAinda não há avaliações
- CMOS DocsDocumento3 páginasCMOS DocsmanojkumarAinda não há avaliações
- Introduction To Electrical Systems (Introduction To Electrical and Electronic Engineering) 2015 Spring SemesterDocumento55 páginasIntroduction To Electrical Systems (Introduction To Electrical and Electronic Engineering) 2015 Spring SemesterErj DaniyaroffAinda não há avaliações
- Acs 108Documento11 páginasAcs 108Jovan FernandezAinda não há avaliações
- 180 NMDocumento4 páginas180 NMPranjal JalanAinda não há avaliações