Você também pode gostar
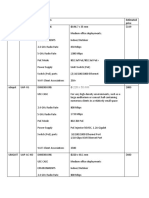
- Brand Model Specification Estimated PriceDocumento2 páginasBrand Model Specification Estimated PriceNamwangala Rashid NatinduAinda não há avaliações
- Access ControllerDocumento1 páginaAccess ControllerNamwangala Rashid NatinduAinda não há avaliações
- ZKTecoDoor Access Controller-UpdatedDocumento1 páginaZKTecoDoor Access Controller-UpdatedNamwangala Rashid NatinduAinda não há avaliações
- Desk Infromation AreaDocumento2 páginasDesk Infromation AreaNamwangala Rashid NatinduAinda não há avaliações
- Annual Plan Sida Ict Library Sub-ProgrammesDocumento24 páginasAnnual Plan Sida Ict Library Sub-ProgrammesNamwangala Rashid NatinduAinda não há avaliações
- Boq Vs OrderedDocumento1 páginaBoq Vs OrderedNamwangala Rashid NatinduAinda não há avaliações
- KeikaDocumento1 páginaKeikaNamwangala Rashid NatinduAinda não há avaliações
- 6 141023133550 Conversion Gate02Documento48 páginas6 141023133550 Conversion Gate02Namwangala Rashid NatinduAinda não há avaliações
- Proposed Ict Facilities - Coecvs at Mloganzila1.04.2019Documento20 páginasProposed Ict Facilities - Coecvs at Mloganzila1.04.2019Namwangala Rashid NatinduAinda não há avaliações
- 2012-13 Ruvuma Basin Annual Hydrological ReportDocumento28 páginas2012-13 Ruvuma Basin Annual Hydrological ReportNamwangala Rashid NatinduAinda não há avaliações
- Cementing: Habiburrohman, B.Eng, M.EngDocumento52 páginasCementing: Habiburrohman, B.Eng, M.EngNamwangala Rashid NatinduAinda não há avaliações
- Drilling Fluids PresentationDocumento81 páginasDrilling Fluids PresentationNamwangala Rashid Natindu100% (1)
- BasicPetro 2 PDFDocumento157 páginasBasicPetro 2 PDFNamwangala Rashid NatinduAinda não há avaliações
- Well Planning: Habiburrohman AbdullahDocumento30 páginasWell Planning: Habiburrohman AbdullahNamwangala Rashid NatinduAinda não há avaliações
- What Makes Up A PC?Documento9 páginasWhat Makes Up A PC?Namwangala Rashid NatinduAinda não há avaliações
- Session 7Documento23 páginasSession 7Namwangala Rashid NatinduAinda não há avaliações
- What Makes Up A PC?Documento10 páginasWhat Makes Up A PC?Namwangala Rashid NatinduAinda não há avaliações
- 3 (C) Explain Tools For CriticalDocumento5 páginas3 (C) Explain Tools For CriticalNamwangala Rashid NatinduAinda não há avaliações
- Session 3Documento13 páginasSession 3Namwangala Rashid NatinduAinda não há avaliações
- What Makes Up A PC?Documento12 páginasWhat Makes Up A PC?Namwangala Rashid NatinduAinda não há avaliações
- Session 1Documento6 páginasSession 1Namwangala Rashid NatinduAinda não há avaliações
- Session 4Documento23 páginasSession 4Namwangala Rashid NatinduAinda não há avaliações
- Session 2Documento17 páginasSession 2Namwangala Rashid NatinduAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Distance Measuring EquipmentDocumento12 páginasDistance Measuring Equipmentमेनसन लाखेमरूAinda não há avaliações
- Scaffolding Price ListDocumento7 páginasScaffolding Price ListAl Patrick Dela CalzadaAinda não há avaliações
- College ManagementDocumento58 páginasCollege Managementforum502Ainda não há avaliações
- Valve PagesDocumento5 páginasValve PagesJoyal ThomasAinda não há avaliações
- Procedures For Solar Electric (Photovoltaic Abbreviated As PV) System Design and InstallationDocumento5 páginasProcedures For Solar Electric (Photovoltaic Abbreviated As PV) System Design and InstallationUmamaheshwarrao VarmaAinda não há avaliações
- 2014 03 Istanbul PDFDocumento3 páginas2014 03 Istanbul PDFFaraj DividAinda não há avaliações
- 6 3 AnswersDocumento4 páginas6 3 Answersshiwaisanxian100% (1)
- Assignment 1: Drive Fundamentals: (4 Marks)Documento1 páginaAssignment 1: Drive Fundamentals: (4 Marks)kd35Ainda não há avaliações
- Paradox Pir 476 Dg55 Dg55c Dg65 Dg65c Dg75 Dg75c 476 476pet Atm EtlDocumento1 páginaParadox Pir 476 Dg55 Dg55c Dg65 Dg65c Dg75 Dg75c 476 476pet Atm EtlTech StarAinda não há avaliações
- Fourier Series - MATLAB & Simulink PDFDocumento7 páginasFourier Series - MATLAB & Simulink PDFWanderson Antonio Sousa SilvaAinda não há avaliações
- Explain The Basic Elements of A C# Program. Illustrate Every Aspect Completely Through A Simple C# Program StructureDocumento6 páginasExplain The Basic Elements of A C# Program. Illustrate Every Aspect Completely Through A Simple C# Program StructureishwarsumeetAinda não há avaliações
- Sagana Kutus 132kv Transmission Line and SubstationDocumento324 páginasSagana Kutus 132kv Transmission Line and Substationshivvaram-1100% (1)
- B Indice F400 EDocumento8 páginasB Indice F400 EIslam ShoukryAinda não há avaliações
- Cryogenic and Its ApplicationDocumento11 páginasCryogenic and Its ApplicationBhoomika MansharamaniAinda não há avaliações
- Iv2906 Iveco Ad380t42h 6x4Documento2 páginasIv2906 Iveco Ad380t42h 6x4أبو خالد الأثرىAinda não há avaliações
- SPEC SHEET 005 AeroGlass LensDocumento1 páginaSPEC SHEET 005 AeroGlass LensMarco GalindoAinda não há avaliações
- Silhouette Training NotesDocumento33 páginasSilhouette Training NotesMichael Lester67% (3)
- FRAMECAD F300i Operating Manual (FCF2) - Release 10102013Documento221 páginasFRAMECAD F300i Operating Manual (FCF2) - Release 10102013assssaaassd100% (4)
- BSA D14 175 Bantam Supreme Sports Bushman Maintenance Instruction Manual PDFDocumento37 páginasBSA D14 175 Bantam Supreme Sports Bushman Maintenance Instruction Manual PDFjvdkjdlkkAinda não há avaliações
- SnapDrive 6.1.1 For Windows Installation and Admin Sit Ration GuideDocumento208 páginasSnapDrive 6.1.1 For Windows Installation and Admin Sit Ration Guideurtv666Ainda não há avaliações
- Exp-3 (Speed Control by V-F MethodDocumento4 páginasExp-3 (Speed Control by V-F MethoduttamAinda não há avaliações
- Minimum Load For Empty Minimum Load For OperatingDocumento6 páginasMinimum Load For Empty Minimum Load For OperatingjitendraAinda não há avaliações
- Assignment 1 Low Temperature and SuperconductivityDocumento3 páginasAssignment 1 Low Temperature and SuperconductivityNadhrah MuradAinda não há avaliações
- Mathcad - 01 - Sump TankDocumento10 páginasMathcad - 01 - Sump Tankisrar khan0% (1)
- Catalogo GIACOMINIDocumento45 páginasCatalogo GIACOMINIIsrael Silva Hgo.Ainda não há avaliações
- Const Estimate Made EasyDocumento31 páginasConst Estimate Made EasyLorenzo SerranoAinda não há avaliações
- Btree Practice ProbsDocumento2 páginasBtree Practice ProbsAbyssman ManAinda não há avaliações
- Insurer Offer Letter DV 2Documento5 páginasInsurer Offer Letter DV 2Lycan de LunaAinda não há avaliações
- Gear Selector CableDocumento3 páginasGear Selector CableojopodoabeAinda não há avaliações
- Astm A182 f22 Class 3Documento3 páginasAstm A182 f22 Class 3VõTạAinda não há avaliações