Você também pode gostar
- Difraccion de Rayos XDocumento4 páginasDifraccion de Rayos XMagda MontielAinda não há avaliações
- 4ta Evaluación Unidad de Aprendizaje 3 4taDocumento3 páginas4ta Evaluación Unidad de Aprendizaje 3 4taJose IgnacioAinda não há avaliações
- Modelacion Hidraulica Hec RasDocumento7 páginasModelacion Hidraulica Hec RasWilsonAinda não há avaliações
- Brochure PetroperuDocumento13 páginasBrochure PetroperuCrezpo YzAinda não há avaliações
- Combinatoria UltimoDocumento23 páginasCombinatoria UltimoAlex Jhonny Crispin FernandezAinda não há avaliações
- Contaminación Ambiental de La OroyaDocumento3 páginasContaminación Ambiental de La Oroyajanethbraez70% (10)
- LogisticaDocumento19 páginasLogisticaMitzu ToyosatoAinda não há avaliações
- Especificaciones Tecnicas Formato 003 Dotacion de Uniformes (2017) Nomina DiariaDocumento10 páginasEspecificaciones Tecnicas Formato 003 Dotacion de Uniformes (2017) Nomina DiariaFRANCIS BRACHOAinda não há avaliações
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - VIRTUAL - ANÁLISIS Y PRODUCCIÓN DEL DISCURSO CORPORATIVO - (GRUPO B01)Documento9 páginasEvaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - VIRTUAL - ANÁLISIS Y PRODUCCIÓN DEL DISCURSO CORPORATIVO - (GRUPO B01)Diana OrozcoAinda não há avaliações
- Reacondicionamiento de PozosDocumento18 páginasReacondicionamiento de PozosRamon antonio Arteaga brachoAinda não há avaliações
- Psicologia 2Documento4 páginasPsicologia 2Fernanda SanguinoAinda não há avaliações
- Autoevaluacion QuimicaDocumento2 páginasAutoevaluacion QuimicaAndres JimboAinda não há avaliações
- Modelo Resupuesto y CronogramaDocumento7 páginasModelo Resupuesto y Cronogramaluz OspinaAinda não há avaliações
- Organizadores GráficosDocumento10 páginasOrganizadores GráficosLuis Bruno100% (1)
- (F-MCM-HSE-62) Formato Prueba Capacitación Manejo Manual de CargasDocumento4 páginas(F-MCM-HSE-62) Formato Prueba Capacitación Manejo Manual de CargasChristian Francisco Lobos Sagua50% (2)
- Análisis Costo Beneficio TerminadoDocumento16 páginasAnálisis Costo Beneficio Terminadoerika beatriz bonifaz camposAinda não há avaliações
- Ponencia EscritaDocumento5 páginasPonencia Escritaadrian rene silva sterlingAinda não há avaliações
- 3339-Texto Del Artículo-6187-1-10-20190112Documento10 páginas3339-Texto Del Artículo-6187-1-10-20190112lucellyAinda não há avaliações
- Informe de Monitoreo de Agua - Humboldt (Firmado)Documento89 páginasInforme de Monitoreo de Agua - Humboldt (Firmado)Junior Meza AranaAinda não há avaliações
- Cómo Lidiar Con La Ambivalencia en Psicoterapia: Un Modelo Conceptual para La Formulación de CasoDocumento19 páginasCómo Lidiar Con La Ambivalencia en Psicoterapia: Un Modelo Conceptual para La Formulación de CasoCarla Sánchez HernándezAinda não há avaliações
- Rubrica de Evaluacion Docente 2017Documento8 páginasRubrica de Evaluacion Docente 2017Eloy Celso Aquise Lerma82% (11)
- Actividad 2 InfografiaDocumento6 páginasActividad 2 Infografiajessica villarragaAinda não há avaliações
- Enfermedades MentalesDocumento13 páginasEnfermedades MentalesCatalina Paez GalanAinda não há avaliações
- Base Legal Del Sistema Nacional Bancario Anderson Huaman MiguelDocumento4 páginasBase Legal Del Sistema Nacional Bancario Anderson Huaman MiguelMaría Nelva Pomahuacre Gómez100% (1)
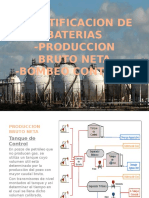
- Identificacion de BateriasDocumento8 páginasIdentificacion de BateriasRodrigo Avila Silva100% (2)
- Diseño Tricimoto en RobotranDocumento20 páginasDiseño Tricimoto en RobotranMauro EspinosaAinda não há avaliações
- Fonema DDocumento35 páginasFonema DSamy SanAinda não há avaliações
- Listas EspecialesDocumento17 páginasListas EspecialesManuel Jesus TorresAinda não há avaliações
- Instituto Tecnológico de Ocotlá1 TransformadoresDocumento15 páginasInstituto Tecnológico de Ocotlá1 TransformadoresBrayan Zuno SolisAinda não há avaliações
- Práctica de HerramientasDocumento11 páginasPráctica de HerramientasskarzockAinda não há avaliações
- Prácticas de refrigeración y aire acondicionadoNo EverandPrácticas de refrigeración y aire acondicionadoNota: 5 de 5 estrelas5/5 (6)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroNo EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroNota: 4 de 5 estrelas4/5 (1)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressNo EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressNota: 5 de 5 estrelas5/5 (1)
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchNo Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchNota: 3.5 de 5 estrelas3.5/5 (2)
- Influencia. La psicología de la persuasiónNo EverandInfluencia. La psicología de la persuasiónNota: 4.5 de 5 estrelas4.5/5 (14)
- UF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)No EverandUF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)Ainda não há avaliações
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasNo EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasAinda não há avaliações
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosNo EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosNota: 4 de 5 estrelas4/5 (16)