Você também pode gostar
- Liebherr Brochure Duty Cycle Crawler Cranes HS Series EN PDFDocumento40 páginasLiebherr Brochure Duty Cycle Crawler Cranes HS Series EN PDFMadhu KumarAinda não há avaliações
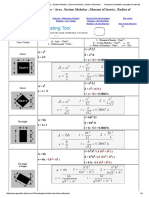
- Formulas 1 - Section Properties(Area, Section Modulus, Moment of Inertia, Radius of Gyration) Structural calculation, strength of materials PDFDocumento4 páginasFormulas 1 - Section Properties(Area, Section Modulus, Moment of Inertia, Radius of Gyration) Structural calculation, strength of materials PDFMadhu KumarAinda não há avaliações
- Formulas 1 - Section Properties(Area, Section Modulus, Moment of Inertia, Radius of Gyration) Structural calculation, strength of materials PDFDocumento4 páginasFormulas 1 - Section Properties(Area, Section Modulus, Moment of Inertia, Radius of Gyration) Structural calculation, strength of materials PDFMadhu KumarAinda não há avaliações
- 6125 Low Alloyed Steel For Casting SCM25: Scana Steel Stavanger AsDocumento1 página6125 Low Alloyed Steel For Casting SCM25: Scana Steel Stavanger AsMadhu KumarAinda não há avaliações
- Infram, Pobox 688, 7500 Ar EnschedeDocumento15 páginasInfram, Pobox 688, 7500 Ar EnschedeMadhu KumarAinda não há avaliações
- Pages PDFDocumento28 páginasPages PDFMadhu KumarAinda não há avaliações
- Retaining Walls and Geotechnical Design To Eurocode 7Documento92 páginasRetaining Walls and Geotechnical Design To Eurocode 7josif100% (5)
- New HF/MF Digital Maritime Mobile SystemsDocumento16 páginasNew HF/MF Digital Maritime Mobile SystemsMadhu KumarAinda não há avaliações
- Lec28 PDFDocumento27 páginasLec28 PDFMadhu KumarAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Assignment 2Documento7 páginasAssignment 2hfzhnAinda não há avaliações
- Shaft Vibration MeasurementDocumento8 páginasShaft Vibration Measurementrmsr_7576100% (1)
- NVH 00 Program 2023Documento6 páginasNVH 00 Program 2023Nicola ColangeloAinda não há avaliações
- Dynamic Analysis Stranded Wire SpringsDocumento71 páginasDynamic Analysis Stranded Wire SpringsJoseph J. ZajkAinda não há avaliações
- Dynamics of Structures Apuntes PDFDocumento112 páginasDynamics of Structures Apuntes PDFHero Djoni SAinda não há avaliações
- Mech-Vii-Mechanical Vibrations NotesDocumento86 páginasMech-Vii-Mechanical Vibrations NotesHOD MEDAinda não há avaliações
- Review of Viscoelastic Materials Used in Viscoelastic DampersDocumento7 páginasReview of Viscoelastic Materials Used in Viscoelastic DampersNikhil ShedbaleAinda não há avaliações
- Vibration Analysis and Acceptance StandardDocumento23 páginasVibration Analysis and Acceptance StandardEstebanRivera100% (2)
- T2 - Proximity Transducer System OperationDocumento34 páginasT2 - Proximity Transducer System OperationarijitnagAinda não há avaliações
- Aeronautical EngineeringDocumento133 páginasAeronautical EngineeringPauloAndresSepulveda0% (1)
- SKF Eddy Current Probes SystemsDocumento64 páginasSKF Eddy Current Probes SystemsAnonymous Uk3JxlHA100% (1)
- Basics of Rotor and Structural VibrationDocumento23 páginasBasics of Rotor and Structural VibrationdiegovalenzuelaAinda não há avaliações
- MAT1001 Practice-M5L3Documento5 páginasMAT1001 Practice-M5L3johnAinda não há avaliações
- FFT Use in DIAdemDocumento22 páginasFFT Use in DIAdemsibinmathewAinda não há avaliações
- CantileverBased SensorsDocumento252 páginasCantileverBased Sensorsraj niraliAinda não há avaliações
- Vibrocontrol 6000 Compact MonitorDocumento8 páginasVibrocontrol 6000 Compact MonitorPedro RosaAinda não há avaliações
- Bs-Iso-10816-6-1995 A1-2015Documento14 páginasBs-Iso-10816-6-1995 A1-2015Alfrett Cabrera100% (1)
- Problems and Solutions For StudentsDocumento295 páginasProblems and Solutions For StudentsalsamixersAinda não há avaliações
- Common Causes and Effects of Piping Vibration - A Short Article - What Is PipingDocumento5 páginasCommon Causes and Effects of Piping Vibration - A Short Article - What Is PipingTroy HooperAinda não há avaliações
- CPC PDFDocumento4 páginasCPC PDFselamad3Ainda não há avaliações
- Materials Today: Proceedings: Rahul Kumar, Ankit Jain, Shri Krishna Mishra, Manish Joshi, Kalyan Singh, Ritu JainDocumento7 páginasMaterials Today: Proceedings: Rahul Kumar, Ankit Jain, Shri Krishna Mishra, Manish Joshi, Kalyan Singh, Ritu JainManish JoshiAinda não há avaliações
- SAP2000 Viscous Fluid - Steel Structures PDFDocumento16 páginasSAP2000 Viscous Fluid - Steel Structures PDFabelkrusnik02Ainda não há avaliações
- Operation: Dynapac CC 422/422C/CC 422HF/422CHF CC 432 CC 522/522C/CC 522HF/522CHFDocumento33 páginasOperation: Dynapac CC 422/422C/CC 422HF/422CHF CC 432 CC 522/522C/CC 522HF/522CHFanwar salimAinda não há avaliações
- Inside This IssueDocumento52 páginasInside This IssueJuan MartinezAinda não há avaliações
- VNB211 00 - en GBDocumento4 páginasVNB211 00 - en GBchong jkAinda não há avaliações
- Mechanics of Drillstrings and Marine Risers PDFDocumento401 páginasMechanics of Drillstrings and Marine Risers PDFlfsijAinda não há avaliações
- Maintenance Schedule Checklist For Hydro Generators PDFDocumento65 páginasMaintenance Schedule Checklist For Hydro Generators PDFmridu ranjanAinda não há avaliações
- Influence of Fluid Structure Interaction On A Concrete Dam During PDFDocumento140 páginasInfluence of Fluid Structure Interaction On A Concrete Dam During PDFSanjay SibalAinda não há avaliações
- Handout 5 - Source Filter Theory PDFDocumento4 páginasHandout 5 - Source Filter Theory PDFTaha AhsanAinda não há avaliações
- J Measurement 2016 08 016Documento12 páginasJ Measurement 2016 08 016Arun KumarAinda não há avaliações