Você também pode gostar
- Development of Methodology For Assessing The Heating Performance of Domestic Microwave OvensDocumento14 páginasDevelopment of Methodology For Assessing The Heating Performance of Domestic Microwave OvensFrankPapaAinda não há avaliações
- Responses of Lactic Acid Bacteria To o X y G e NDocumento12 páginasResponses of Lactic Acid Bacteria To o X y G e NFrankPapaAinda não há avaliações
- Roderick Kwabena Daddey-Adjei - Effect of Room Temperature Curing On Microbial Population of Cured Pork Products - 1999Documento121 páginasRoderick Kwabena Daddey-Adjei - Effect of Room Temperature Curing On Microbial Population of Cured Pork Products - 1999FrankPapaAinda não há avaliações
- Manganese Lactobacillus Plantarum: and Defenses Against Oxygen Toxicity inDocumento10 páginasManganese Lactobacillus Plantarum: and Defenses Against Oxygen Toxicity inFrankPapaAinda não há avaliações
- U Technical Procedures Manual: June 2020Documento162 páginasU Technical Procedures Manual: June 2020FrankPapaAinda não há avaliações
- Fsis Directive: Food Safety and Inspection ServiceDocumento11 páginasFsis Directive: Food Safety and Inspection ServiceFrankPapaAinda não há avaliações
- CJJFD Engmicrowavebaconpaper 2006Documento9 páginasCJJFD Engmicrowavebaconpaper 2006FrankPapaAinda não há avaliações
- US4911549Documento11 páginasUS4911549FrankPapaAinda não há avaliações
- SMP Calibration CPDocumento2 páginasSMP Calibration CPFrankPapaAinda não há avaliações
- Nitrite ReportDocumento16 páginasNitrite ReportFrankPapaAinda não há avaliações
- US20090232959A1Documento9 páginasUS20090232959A1FrankPapaAinda não há avaliações
- US20100056628A1Documento8 páginasUS20100056628A1FrankPapaAinda não há avaliações
- FEMA GRAS - A GRAS Assessment Program For Flavor IngredientsDocumento9 páginasFEMA GRAS - A GRAS Assessment Program For Flavor IngredientsFrankPapaAinda não há avaliações
- Sensory Analysis - Section 4 PDFDocumento11 páginasSensory Analysis - Section 4 PDFDet GuillermoAinda não há avaliações
- US3971852Documento15 páginasUS3971852FrankPapaAinda não há avaliações
- Unesco - Eolss Sample Chapters: Hurdle TechnologyDocumento0 páginaUnesco - Eolss Sample Chapters: Hurdle TechnologyProf C.S.PurushothamanAinda não há avaliações
- 5010 1Documento6 páginas5010 1FrankPapaAinda não há avaliações
- Meat Color Guide PDFDocumento136 páginasMeat Color Guide PDFFrankPapaAinda não há avaliações
- Incubation of Curing Brines.Documento75 páginasIncubation of Curing Brines.FrankPapaAinda não há avaliações
- BIAM - 560 - Lab - Wk06 D40562330Documento29 páginasBIAM - 560 - Lab - Wk06 D40562330FrankPapaAinda não há avaliações
- ESHA PDCAAS Cheat SheetDocumento1 páginaESHA PDCAAS Cheat SheetFrankPapaAinda não há avaliações
- Meat Color Guide PDFDocumento136 páginasMeat Color Guide PDFFrankPapaAinda não há avaliações
- Thermo Physical Properties of Fats and OilsDocumento6 páginasThermo Physical Properties of Fats and OilsFrankPapaAinda não há avaliações
- BIAM - 560 - Lab - Wk01 D40562330Documento19 páginasBIAM - 560 - Lab - Wk01 D40562330FrankPapaAinda não há avaliações
- BIAM - 560 - Lab - Wk01 D40562330Documento19 páginasBIAM - 560 - Lab - Wk01 D40562330FrankPapaAinda não há avaliações
- Simple Guide To Confusion Matrix Terminology2Documento13 páginasSimple Guide To Confusion Matrix Terminology2FrankPapaAinda não há avaliações
- Neural Networks, Nosql, and Reporting: BIAM 560 - Predictive Analytics AB EEKDocumento18 páginasNeural Networks, Nosql, and Reporting: BIAM 560 - Predictive Analytics AB EEKFrankPapaAinda não há avaliações
- BIAM - 560 - Final Course Project D40562330Documento41 páginasBIAM - 560 - Final Course Project D40562330FrankPapaAinda não há avaliações
- An Introduction To Accomplish Agile Business Intelligence For Your BusinessDocumento7 páginasAn Introduction To Accomplish Agile Business Intelligence For Your BusinessFrankPapaAinda não há avaliações
- BIAM - 560 - Lab - Wk01 D40562330Documento19 páginasBIAM - 560 - Lab - Wk01 D40562330FrankPapaAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Romanian Mathematical Competitions 1999Documento33 páginasRomanian Mathematical Competitions 1999kabitoszerAinda não há avaliações
- University of Huddersfield Repository: Original CitationDocumento45 páginasUniversity of Huddersfield Repository: Original CitationVu HungAinda não há avaliações
- Programs On Loops: A-35 Python AssingmentDocumento12 páginasPrograms On Loops: A-35 Python AssingmentA- 08 KaushikiAinda não há avaliações
- Radial and Angular Parts of Atomic OrbitalsDocumento3 páginasRadial and Angular Parts of Atomic OrbitalsW47K3R 27886Ainda não há avaliações
- Equations of Circles PDFDocumento4 páginasEquations of Circles PDFMAYAinda não há avaliações
- Validation of A Loading Model For Simulating Blast Mine Effects On Armoured VehiclesDocumento10 páginasValidation of A Loading Model For Simulating Blast Mine Effects On Armoured VehiclesErik IslasAinda não há avaliações
- Rainflow Counting MethodsDocumento10 páginasRainflow Counting Methodspanos3Ainda não há avaliações
- Heat and Wave EquationDocumento4 páginasHeat and Wave EquationIvan ShaneAinda não há avaliações
- Corporate Finance Outline, Spring 2013Documento60 páginasCorporate Finance Outline, Spring 2013Kasem Ahmed100% (1)
- Theory of Computation - Context Free LanguagesDocumento25 páginasTheory of Computation - Context Free LanguagesBhabatosh SinhaAinda não há avaliações
- P266001coll1 5570Documento90 páginasP266001coll1 5570Arham SheikhAinda não há avaliações
- NeetCode 150 - A List by Amoghmc - LeetCodeDocumento1 páginaNeetCode 150 - A List by Amoghmc - LeetCodepunit patelAinda não há avaliações
- MATH Grade 5 Take Home ActivityDocumento2 páginasMATH Grade 5 Take Home ActivityVenthini LakanathanAinda não há avaliações
- AD Prepay Model MethDocumento21 páginasAD Prepay Model MethfhdeutschmannAinda não há avaliações
- Pauli Paramagnetism and Superconducting StateDocumento12 páginasPauli Paramagnetism and Superconducting StatecaktotAinda não há avaliações
- Madilyn Kendall - Orchard Hideout PortfolioDocumento7 páginasMadilyn Kendall - Orchard Hideout Portfolioapi-491224892Ainda não há avaliações
- Ee050-4-2-Re1 - Final Exam - Apu2f2008pe - QPDocumento8 páginasEe050-4-2-Re1 - Final Exam - Apu2f2008pe - QPabdilrhman sulimanAinda não há avaliações
- Paper 14Documento19 páginasPaper 14RakeshconclaveAinda não há avaliações
- Pemerintah Kabupaten Pamekasan Cabang Dinas Pendidikan Dan Kebudayaan Kecamatan GalisDocumento2 páginasPemerintah Kabupaten Pamekasan Cabang Dinas Pendidikan Dan Kebudayaan Kecamatan GalisMuhamad AminAinda não há avaliações
- Demo Lesson PlanDocumento30 páginasDemo Lesson PlanRandy-IanRexLorenzoAinda não há avaliações
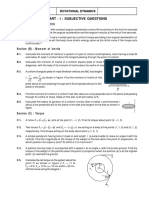
- CPP1 RotationaldynamicsDocumento14 páginasCPP1 RotationaldynamicsBAinda não há avaliações
- SimpleGISBasedMethodforDesigningFiber NetworkDocumento10 páginasSimpleGISBasedMethodforDesigningFiber NetworkDaniel Franco SantanaAinda não há avaliações
- Mech Vibration Intro - RahulDocumento36 páginasMech Vibration Intro - Rahulrs100788Ainda não há avaliações
- Multipurpose Probabilistic Software For Statistical, Sensitivity and Reliability AnalysisDocumento24 páginasMultipurpose Probabilistic Software For Statistical, Sensitivity and Reliability AnalysisAbhishek ChaudhariAinda não há avaliações
- MiniZinc - Tutorial PDFDocumento82 páginasMiniZinc - Tutorial PDFDavidAinda não há avaliações
- Monday Tuesday Wednesday ThursdayDocumento9 páginasMonday Tuesday Wednesday ThursdayMarina AcuñaAinda não há avaliações
- Chapter 1Documento42 páginasChapter 1nislam57Ainda não há avaliações
- From Monopoles To Textures: A Survey of Topological Defects in Cosmological Quantum Field TheoryDocumento7 páginasFrom Monopoles To Textures: A Survey of Topological Defects in Cosmological Quantum Field TheoryDamian SowinskiAinda não há avaliações
- 1201C B.P.S. XII Physics Chapterwise Advanced Study Material 2015 17 PDFDocumento463 páginas1201C B.P.S. XII Physics Chapterwise Advanced Study Material 2015 17 PDFRizwan SalimAinda não há avaliações
- Dijkstra DemoDocumento20 páginasDijkstra DemosudhanAinda não há avaliações