Você também pode gostar
- Empresas Electricas GuayaquilDocumento4 páginasEmpresas Electricas GuayaquilDavidFreireAinda não há avaliações
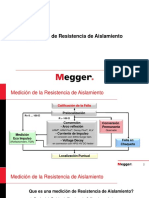
- Medición de Resistencia de AislamientoDocumento11 páginasMedición de Resistencia de AislamientoNelson GarvizuAinda não há avaliações
- Pruebas de Diagnostico de Fallas en Los CablesDocumento25 páginasPruebas de Diagnostico de Fallas en Los CablesDavidFreireAinda não há avaliações
- Modelo de Mercado Eléctrico de PerúDocumento9 páginasModelo de Mercado Eléctrico de PerúDavidFreireAinda não há avaliações
- UrbanizacionesDocumento2 páginasUrbanizacionesDavidFreireAinda não há avaliações
- Hoja 2 VECTORESDocumento5 páginasHoja 2 VECTORESjhonnyfabianAinda não há avaliações
- Control 1Documento3 páginasControl 1Lucas CrovettoAinda não há avaliações
- Axiomas Logica ProposicionalDocumento2 páginasAxiomas Logica ProposicionalJuan Felipe J BAinda não há avaliações
- Experiencia 8 - Sexto Grado - 2023Documento29 páginasExperiencia 8 - Sexto Grado - 2023rafael liamchi bonifacioAinda não há avaliações
- Tema 11.1 - Distribuciones Prob - Ucsm PDFDocumento36 páginasTema 11.1 - Distribuciones Prob - Ucsm PDFmagdalenaAinda não há avaliações
- Id Asignatura 61011087Documento4 páginasId Asignatura 61011087juanAinda não há avaliações
- Mapa Mental Actividad 2 Inv. FormativaDocumento4 páginasMapa Mental Actividad 2 Inv. FormativaMaria Alexandra ARCINIEGAS VANEGAS100% (1)
- Planificación de Matemáticas 4 Silvia 2024Documento4 páginasPlanificación de Matemáticas 4 Silvia 2024Graciela Beatriz DiazAinda não há avaliações
- Examen de Metodos NumericosDocumento16 páginasExamen de Metodos NumericosMarco BayonaAinda não há avaliações
- Silabo - MATEMÁTICA BÁSICA PDFDocumento3 páginasSilabo - MATEMÁTICA BÁSICA PDFCarlos CoronadoAinda não há avaliações
- Plan de Estudios Ingenieria Civil 2017-1-0Documento1 páginaPlan de Estudios Ingenieria Civil 2017-1-0Iris Dahiana GarciaAinda não há avaliações
- Texto Mat 2Documento99 páginasTexto Mat 2juan carlos callata pasacaAinda não há avaliações
- Folleto Aplicado Investigacion OperacionesDocumento48 páginasFolleto Aplicado Investigacion Operacioneslobofrank2Ainda não há avaliações
- Formulario LógicaDocumento3 páginasFormulario Lógicaxerez74Ainda não há avaliações
- Notación CientíficaDocumento3 páginasNotación CientíficaWilmer Flores CastroAinda não há avaliações
- 10 Área en Coordenadas PolaresDocumento6 páginas10 Área en Coordenadas Polaresdekatoh838Ainda não há avaliações
- Tarea 1 - Diego Fernando Sanchez CorralesDocumento9 páginasTarea 1 - Diego Fernando Sanchez Corralesdiego ferAinda não há avaliações
- Beer Dinamica 9e Presentacion PPT c14Documento26 páginasBeer Dinamica 9e Presentacion PPT c14CarlosAinda não há avaliações
- Guia 2 PeriodoDocumento13 páginasGuia 2 PeriodoJuliethGomezAgudeloAinda não há avaliações
- Variable Aleatoria EvaluaciónDocumento6 páginasVariable Aleatoria EvaluaciónJose Luis Perez AlvaradoAinda não há avaliações
- Apuntes PotenciasDocumento4 páginasApuntes PotenciasSebastián alonso Ríos pedroAinda não há avaliações
- Reporte de Lectura 1Documento2 páginasReporte de Lectura 1Fernando Colin SanchezAinda não há avaliações
- Distribucion FDocumento3 páginasDistribucion FJACK ANTONI HIDALGO QUINTOAinda não há avaliações
- 1.ANTES Informe GNPDocumento3 páginas1.ANTES Informe GNPLUIS CASTAÑEDAAinda não há avaliações
- Extraordinario MivDocumento4 páginasExtraordinario MivMarco Antonio Garces LugoAinda não há avaliações
- Clase 11 Modelos Lineales MT1Documento5 páginasClase 11 Modelos Lineales MT1Ivan Alfredo Villar ValverdeAinda não há avaliações
- AMP Modulo5Documento90 páginasAMP Modulo5Andrea GonzálezAinda não há avaliações
- Taller de RRMDocumento8 páginasTaller de RRMHarold HernandezAinda não há avaliações
- Robotica EducativaDocumento16 páginasRobotica Educativayurkka07Ainda não há avaliações
- Instrucciones Del 8085Documento95 páginasInstrucciones Del 8085KRISTIE MARIANA NEIRA VALDEZAinda não há avaliações