Você também pode gostar
- Basic Concept System Identification Methods Procedures in System Identification ExamplesDocumento18 páginasBasic Concept System Identification Methods Procedures in System Identification ExamplesBikrobot BikeAinda não há avaliações
- System Identification: - A Criterion, or Verification FunctionDocumento14 páginasSystem Identification: - A Criterion, or Verification FunctionMona AliAinda não há avaliações
- Model EvaluationDocumento80 páginasModel EvaluationDeva Hema DAinda não há avaliações
- Myung Ohio State Model Selection MethodsDocumento76 páginasMyung Ohio State Model Selection MethodsSouparna MukhopadhyayAinda não há avaliações
- Empirical Methods in Finance Time Series Models Part 2: ARIMA Models by Sakshi SharmaDocumento49 páginasEmpirical Methods in Finance Time Series Models Part 2: ARIMA Models by Sakshi SharmaSakshi SharmaAinda não há avaliações
- Machine Learning ReportDocumento42 páginasMachine Learning ReportSandya Vb91% (11)
- What Is System Identification: Different Approaches To System Identification Depending On Model ClassDocumento48 páginasWhat Is System Identification: Different Approaches To System Identification Depending On Model ClassSuji RajanAinda não há avaliações
- Identification of Dynamic Systems and SeDocumento22 páginasIdentification of Dynamic Systems and SeDaniel Felipe Urdinila PatiñoAinda não há avaliações
- Introduction To (Demand) ForecastingDocumento39 páginasIntroduction To (Demand) Forecastinggeeths207Ainda não há avaliações
- Basic Econometrics Revision - Econometric ModellingDocumento65 páginasBasic Econometrics Revision - Econometric ModellingTrevor ChimombeAinda não há avaliações
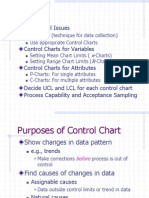
- Statistical Quality Control (SQC) FinalDocumento47 páginasStatistical Quality Control (SQC) FinalSagar DhageAinda não há avaliações
- Automatic ForecastingDocumento7 páginasAutomatic ForecastingRodrigo Vallejos VergaraAinda não há avaliações
- Modelling AssignmentDocumento5 páginasModelling AssignmentDaniel IlesAinda não há avaliações
- Test-Based Computational Model Updating of A Car Body in WhiteDocumento5 páginasTest-Based Computational Model Updating of A Car Body in Whiteuamiranda3518Ainda não há avaliações
- ARIMA Modelling and Forecasting: By: Amar KumarDocumento22 páginasARIMA Modelling and Forecasting: By: Amar KumarAmar Kumar100% (1)
- Simulation in R PDFDocumento27 páginasSimulation in R PDFSachin Sachdeva100% (1)
- MD Presentation2Documento29 páginasMD Presentation2Fathi MusaAinda não há avaliações
- 2 IntroDocumento55 páginas2 IntroALBERT ZHANGAinda não há avaliações
- Model-Based Experimental Design For Biological Systems ModellingDocumento32 páginasModel-Based Experimental Design For Biological Systems ModellingMarcelo SilvaAinda não há avaliações
- Multiple Process Parameter Optimization of Wire Electric Discharge Machining Using Pca-Topsis, Topsis TechniquesDocumento48 páginasMultiple Process Parameter Optimization of Wire Electric Discharge Machining Using Pca-Topsis, Topsis Techniquessrinivas tumatiAinda não há avaliações
- Introduction To SEMDocumento64 páginasIntroduction To SEMThu LeAinda não há avaliações
- Linear Models - Numeric PredictionDocumento7 páginasLinear Models - Numeric Predictionar9vegaAinda não há avaliações
- AkaikeDocumento1 páginaAkaikedelwar28Ainda não há avaliações
- Time Series Notes9Documento32 páginasTime Series Notes9Sam SkywalkerAinda não há avaliações
- JORDAAN2002 - Estimation of The Regularization Parameter For SVRDocumento6 páginasJORDAAN2002 - Estimation of The Regularization Parameter For SVRAnonymous PsEz5kGVaeAinda não há avaliações
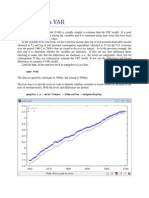
- Estimating A VAR - GretlDocumento9 páginasEstimating A VAR - Gretlkaddour7108Ainda não há avaliações
- Dimensional Analysis PDFDocumento21 páginasDimensional Analysis PDFUmair Khan MarwatAinda não há avaliações
- Response Surface Methodology and MINITABDocumento22 páginasResponse Surface Methodology and MINITABarunsunder100% (1)
- Distillation Column Identification Control Using Wiener ModelDocumento5 páginasDistillation Column Identification Control Using Wiener ModelChristiam Morales AlvaradoAinda não há avaliações
- Regression Analysis WebinarDocumento58 páginasRegression Analysis WebinarBethany RobinsonAinda não há avaliações
- Ex 2 SolutionDocumento13 páginasEx 2 SolutionMian AlmasAinda não há avaliações
- STA302 Week12 FullDocumento30 páginasSTA302 Week12 Fulltianyuan guAinda não há avaliações
- DATT - Class 05 - Assignment - GR 9Documento9 páginasDATT - Class 05 - Assignment - GR 9SAURABH SINGHAinda não há avaliações
- Chapter 8 - Two Dimensional ArraysDocumento22 páginasChapter 8 - Two Dimensional ArraysAhmadaliAinda não há avaliações
- Lect19 Applicationo of ProbbabilityDocumento8 páginasLect19 Applicationo of ProbbabilityMary BeachAinda não há avaliações
- Chap3 Part1 ClassificationDocumento38 páginasChap3 Part1 Classificationhoucem.swissiAinda não há avaliações
- ArimaDocumento21 páginasArimadondan123Ainda não há avaliações
- A1 Tutorial Problems QE1 2015-16Documento11 páginasA1 Tutorial Problems QE1 2015-16Avelyn Tang100% (1)
- Modeling and Simulation: Raul - Ionel@etc - UptDocumento14 páginasModeling and Simulation: Raul - Ionel@etc - UpthassenbbAinda não há avaliações
- Model Parametrization: - Model Classification - General Model Structure - Uniqueness PropertiesDocumento16 páginasModel Parametrization: - Model Classification - General Model Structure - Uniqueness PropertiessmouhabAinda não há avaliações
- JML ArimaDocumento37 páginasJML Arimapg aiAinda não há avaliações
- Comparison of Various System Identification Methods For A MISO SystemDocumento16 páginasComparison of Various System Identification Methods For A MISO SystemSashank Varma JampanaAinda não há avaliações
- Levitin: Introduction To The Design and Analysis of AlgorithmsDocumento35 páginasLevitin: Introduction To The Design and Analysis of Algorithmsjani28cseAinda não há avaliações
- Untitled DocumentDocumento6 páginasUntitled DocumentAparna SinghAinda não há avaliações
- Teknik Komputasi (TEI 116) : 3 Sks Oleh: Husni Rois Ali, S.T., M.Eng. Noor Akhmad Setiawan, S.T., M.T., PH.DDocumento44 páginasTeknik Komputasi (TEI 116) : 3 Sks Oleh: Husni Rois Ali, S.T., M.Eng. Noor Akhmad Setiawan, S.T., M.T., PH.DblackzenyAinda não há avaliações
- Statistic ProcessDocumento39 páginasStatistic ProcessxredjokerxAinda não há avaliações
- DS 432 Assignment I 2020Documento7 páginasDS 432 Assignment I 2020sristi agrawalAinda não há avaliações
- Probabilistic Power Flow Module For PowerFactory DIgSILENTDocumento24 páginasProbabilistic Power Flow Module For PowerFactory DIgSILENTاحمد صالحAinda não há avaliações
- Chapter Seven: Verification and Validation TechniquesDocumento28 páginasChapter Seven: Verification and Validation TechniquesTesfahun GirmaAinda não há avaliações
- Final Stage For Cocomo Using PCADocumento8 páginasFinal Stage For Cocomo Using PCAVikas MahurkarAinda não há avaliações
- Final Exam ReviewDocumento46 páginasFinal Exam ReviewBalamurugan KarnanAinda não há avaliações
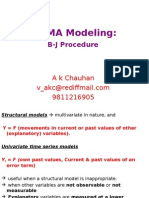
- ARIMA Modeling:: B-J ProcedureDocumento26 páginasARIMA Modeling:: B-J ProcedureMayank RawatAinda não há avaliações
- NARMAX Model Identification of A Palm Oil Biodiesel Engine Using Multi-Objective Optimization Differential EvolutionDocumento10 páginasNARMAX Model Identification of A Palm Oil Biodiesel Engine Using Multi-Objective Optimization Differential EvolutionYlm PtanaAinda não há avaliações
- Introduction To (Demand) ForecastingDocumento39 páginasIntroduction To (Demand) ForecastingAkhil NandakumarAinda não há avaliações
- Constructing ARMA Models in RstudioDocumento7 páginasConstructing ARMA Models in RstudioFernando Perez SavadorAinda não há avaliações
- ARIMA Modelling and ForecastingDocumento30 páginasARIMA Modelling and ForecastingRaymond SmithAinda não há avaliações
- Exp 4Documento10 páginasExp 4jayAinda não há avaliações
- 545 Control Theory III Lecture I PDFDocumento12 páginas545 Control Theory III Lecture I PDFTemidire AdesijiAinda não há avaliações
- Gate-Level Minimization: M.ShoaibDocumento61 páginasGate-Level Minimization: M.ShoaibShoaib MushtaqAinda não há avaliações
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsNo EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsAinda não há avaliações
- Russian GrammarDocumento141 páginasRussian GrammarMatthew HatchAinda não há avaliações
- Algo3DFusionsMems PDFDocumento5 páginasAlgo3DFusionsMems PDFsmouhabAinda não há avaliações
- TruTrak Evolution Type II FINAL - Cleared 08aug12Documento2 páginasTruTrak Evolution Type II FINAL - Cleared 08aug12smouhabAinda não há avaliações
- ln200 PDFDocumento2 páginasln200 PDFsmouhabAinda não há avaliações
- Transient and Frequency AnalysisDocumento12 páginasTransient and Frequency AnalysissmouhabAinda não há avaliações
- Input SignalsDocumento31 páginasInput SignalssmouhabAinda não há avaliações
- Model Parametrization: - Model Classification - General Model Structure - Uniqueness PropertiesDocumento16 páginasModel Parametrization: - Model Classification - General Model Structure - Uniqueness PropertiessmouhabAinda não há avaliações
- Fourier AnalysisDocumento17 páginasFourier AnalysissmouhabAinda não há avaliações
- Module 1 ITE Elective 1 New - CurriculumDocumento10 páginasModule 1 ITE Elective 1 New - CurriculumGarry PenoliarAinda não há avaliações
- Hypotheses DevelopmentDocumento3 páginasHypotheses DevelopmentIrfan Badar AbroAinda não há avaliações
- Final File 2014 Haroon and JamshedDocumento4 páginasFinal File 2014 Haroon and JamshedMuhammad ImranAinda não há avaliações
- 2019 - Van Aert - Publication Bias Examined in Meta-Analyses From Psychology and Medicine - A Meta-Meta-AnalysisDocumento32 páginas2019 - Van Aert - Publication Bias Examined in Meta-Analyses From Psychology and Medicine - A Meta-Meta-AnalysisLim Kok PingAinda não há avaliações
- Wilfrid Sellars, "Philosophy and The Scientific Image of Man"Documento18 páginasWilfrid Sellars, "Philosophy and The Scientific Image of Man"Jordan Feenstra100% (1)
- Approach: Teaching The Analysis of Textual Data: An ExperientialDocumento4 páginasApproach: Teaching The Analysis of Textual Data: An ExperientialJoBPAinda não há avaliações
- Souvik Chakraborty ReliabilityDocumento16 páginasSouvik Chakraborty ReliabilitysounakAinda não há avaliações
- Creativity Among The Secondary School Students - A StudyDocumento11 páginasCreativity Among The Secondary School Students - A StudyIJAR JOURNALAinda não há avaliações
- The Scanning Electron MicroscopeDocumento65 páginasThe Scanning Electron MicroscopeCORE Materials67% (3)
- Quiz1 ISDS361BDocumento4 páginasQuiz1 ISDS361BAnh PhamAinda não há avaliações
- Matter, Forces, Motion and KinematicsDocumento23 páginasMatter, Forces, Motion and Kinematicssanober humair0% (1)
- Action Research File B.edDocumento4 páginasAction Research File B.edVikas Saini64% (11)
- Introduction To Research MethodsDocumento10 páginasIntroduction To Research MethodsJerry CoemanAinda não há avaliações
- 16-Sampling Designs and ProceduresDocumento27 páginas16-Sampling Designs and ProceduresAbdalelah FrarjehAinda não há avaliações
- How Is An Experiment PerformedDocumento4 páginasHow Is An Experiment PerformedAyesha HamidAinda não há avaliações
- Leininger's Phases of Ethnonursing Analysis For Qualitative DataDocumento1 páginaLeininger's Phases of Ethnonursing Analysis For Qualitative DataLizaEllagaAinda não há avaliações
- Bio 1bDocumento27 páginasBio 1bapi-369331235Ainda não há avaliações
- Physics: Teacher Guide Grade 11Documento168 páginasPhysics: Teacher Guide Grade 11DanielAinda não há avaliações
- 1039 ChemometricsDocumento19 páginas1039 ChemometricsElQf2012Ainda não há avaliações
- Tugas HukumDocumento6 páginasTugas HukumshillaAinda não há avaliações
- Research Methodology MCQs (Multiple Choice Questions and Answer) For NTA NET and SLETDocumento14 páginasResearch Methodology MCQs (Multiple Choice Questions and Answer) For NTA NET and SLETDr Zafar Iqbal Dr Zafar IqbalAinda não há avaliações
- Modern English EssayDocumento9 páginasModern English EssayAhad aliAinda não há avaliações
- Definitions of PlanningDocumento14 páginasDefinitions of PlanningKiran AishaAinda não há avaliações
- Study Plan - SociologyDocumento16 páginasStudy Plan - SociologyAfzaal AhmadAinda não há avaliações
- Assignment / Tugasan - Marketing ResearchDocumento12 páginasAssignment / Tugasan - Marketing ResearchzabedahibrahimAinda não há avaliações
- ANOVA T - TestDocumento19 páginasANOVA T - Testmilrosebatilo2012Ainda não há avaliações
- Research Methodology Course Guideline Sem2 202223 Updated-1 - 230317 - 100753Documento6 páginasResearch Methodology Course Guideline Sem2 202223 Updated-1 - 230317 - 100753Gopi KupuchittyAinda não há avaliações
- Lecture9 November18&19Documento41 páginasLecture9 November18&19Devon MoodyAinda não há avaliações
- Qualitative Research Vs QuatitativeDocumento24 páginasQualitative Research Vs QuatitativeUsama najamAinda não há avaliações