Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Guide For The Design, Construction, (Reapproved 1999) and Repair of FerrocementDocumento30 páginasGuide For The Design, Construction, (Reapproved 1999) and Repair of FerrocementSachith SeneviratnaAinda não há avaliações
- "Effect of Polypropylene Fibers on Producing Sustainable Accelerated Hardened Cementitious Materials" بلصتلا ةعيرس ةماذتسم ةيتنمسأ داوم جاتنأ يف نيلبورب يلوبلا فايلأ ريثأتDocumento10 páginas"Effect of Polypropylene Fibers on Producing Sustainable Accelerated Hardened Cementitious Materials" بلصتلا ةعيرس ةماذتسم ةيتنمسأ داوم جاتنأ يف نيلبورب يلوبلا فايلأ ريثأتAlhilali ZiyadAinda não há avaliações
- "Effect of Polypropylene Fibers on Producing Sustainable Accelerated Hardened Cementitious Materials" بلصتلا ةعيرس ةماذتسم ةيتنمسأ داوم جاتنأ يف نيلبورب يلوبلا فايلأ ريثأتDocumento10 páginas"Effect of Polypropylene Fibers on Producing Sustainable Accelerated Hardened Cementitious Materials" بلصتلا ةعيرس ةماذتسم ةيتنمسأ داوم جاتنأ يف نيلبورب يلوبلا فايلأ ريثأتAlhilali ZiyadAinda não há avaliações
- "Effect of Polypropylene Fibers on Producing Sustainable Accelerated Hardened Cementitious Materials" بلصتلا ةعيرس ةماذتسم ةيتنمسأ داوم جاتنأ يف نيلبورب يلوبلا فايلأ ريثأتDocumento10 páginas"Effect of Polypropylene Fibers on Producing Sustainable Accelerated Hardened Cementitious Materials" بلصتلا ةعيرس ةماذتسم ةيتنمسأ داوم جاتنأ يف نيلبورب يلوبلا فايلأ ريثأتAlhilali ZiyadAinda não há avaliações
- Effect of Polypropylene Fibers on Producing Sustainable Accelerated Hardened Cementitious Materials الاستلال الجديد PDFDocumento14 páginasEffect of Polypropylene Fibers on Producing Sustainable Accelerated Hardened Cementitious Materials الاستلال الجديد PDFAlhilali ZiyadAinda não há avaliações
- 2019 - Thermal Resistance of Carbon Fibrescarbon Fibre Reinforced Polymers Under Stationary Atmospheric Conditions and Varying Exposure Times PDFDocumento6 páginas2019 - Thermal Resistance of Carbon Fibrescarbon Fibre Reinforced Polymers Under Stationary Atmospheric Conditions and Varying Exposure Times PDFAlhilali ZiyadAinda não há avaliações
- FerrocementDocumento5 páginasFerrocementAlhilali ZiyadAinda não há avaliações
- Damp Preventation 2Documento6 páginasDamp Preventation 2Alhilali ZiyadAinda não há avaliações
- Creep of Timber Joints: Key Words: Keyword, Keyword, Keyword, Keyword, Keyword, KeywordDocumento24 páginasCreep of Timber Joints: Key Words: Keyword, Keyword, Keyword, Keyword, Keyword, KeywordAlhilali ZiyadAinda não há avaliações
- Sample Cover LetterDocumento1 páginaSample Cover Letteryarrha100% (3)
- Pearl River Tower Guangzhou, ChinaDocumento7 páginasPearl River Tower Guangzhou, ChinaAlhilali ZiyadAinda não há avaliações
- Sample Cover LetterDocumento1 páginaSample Cover Letteryarrha100% (3)
- 2nd Place Concrete Projects Award FInalDocumento1 página2nd Place Concrete Projects Award FInalAlhilali ZiyadAinda não há avaliações
- Design of Bituminous Mixtures: Test Procedure ForDocumento40 páginasDesign of Bituminous Mixtures: Test Procedure ForAlhilali ZiyadAinda não há avaliações
- ReviseDocumento6 páginasReviseAlhilali ZiyadAinda não há avaliações
- Publishing in Asce Journals: A Guide For AuthorsDocumento48 páginasPublishing in Asce Journals: A Guide For AuthorsAlhilali ZiyadAinda não há avaliações
- ACI Committee 549 Minutes2010Documento22 páginasACI Committee 549 Minutes2010Alhilali ZiyadAinda não há avaliações
- 1256 CT041Documento8 páginas1256 CT041Alhilali ZiyadAinda não há avaliações
- University of Aberdeen Department of Mathematical Sciences: Author IC Date 4.10.04 CodeDocumento4 páginasUniversity of Aberdeen Department of Mathematical Sciences: Author IC Date 4.10.04 CodeAlhilali ZiyadAinda não há avaliações
- ACI Committee 2010Documento22 páginasACI Committee 2010Alhilali ZiyadAinda não há avaliações
- Concrete TestingDocumento1 páginaConcrete TestingAlhilali ZiyadAinda não há avaliações
- University of Aberdeen Department of Mathematical Sciences: Dy DX X yDocumento7 páginasUniversity of Aberdeen Department of Mathematical Sciences: Dy DX X yAlhilali ZiyadAinda não há avaliações
- CIP35 - Testing Compressive Strength of ConcreteDocumento2 páginasCIP35 - Testing Compressive Strength of ConcreteGerardo BeckerAinda não há avaliações
- Gowers IV 21 PDFDocumento12 páginasGowers IV 21 PDFAlhilali ZiyadAinda não há avaliações
- University of Aberdeen Department of Mathematical Sciences: Dy DX X yDocumento7 páginasUniversity of Aberdeen Department of Mathematical Sciences: Dy DX X yAlhilali ZiyadAinda não há avaliações
- Civil SpecificationsDocumento65 páginasCivil SpecificationsmrkssastryAinda não há avaliações
- ReviseDocumento6 páginasReviseAlhilali ZiyadAinda não há avaliações
- ComplexDocumento6 páginasComplexAlhilali ZiyadAinda não há avaliações
- ComplexDocumento6 páginasComplexAlhilali ZiyadAinda não há avaliações
- Durock Cement Board Installation Guide en CB237Documento8 páginasDurock Cement Board Installation Guide en CB237Alhilali ZiyadAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Yash Thesis UTILIZATION OF WASTE GRANITE SLURRY IN CEMENT MORTARDocumento75 páginasYash Thesis UTILIZATION OF WASTE GRANITE SLURRY IN CEMENT MORTARAkash HalderAinda não há avaliações
- 12d20105a Experimental Stress AnalysisDocumento1 página12d20105a Experimental Stress AnalysissubbuAinda não há avaliações
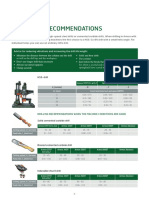
- Machining Recommendations: Advice For Reducing Vibrations and Increasing The Drill Life LengthDocumento3 páginasMachining Recommendations: Advice For Reducing Vibrations and Increasing The Drill Life LengthbasaricaAinda não há avaliações
- Om The Laboratory To Ton Scale in Continuous FlowDocumento3 páginasOm The Laboratory To Ton Scale in Continuous FlowAaron Troy SmallAinda não há avaliações
- Zinc Oxide Powder & DispersionDocumento5 páginasZinc Oxide Powder & DispersionAfdilah IrawatiAinda não há avaliações
- MOS For Bituminous Protective Coating Water ProofingDocumento5 páginasMOS For Bituminous Protective Coating Water ProofingHussam WaleedAinda não há avaliações
- 3Ph Horiz Sep 2010 Weir VerA SIDocumento5 páginas3Ph Horiz Sep 2010 Weir VerA SIBrenda DavisAinda não há avaliações
- Lab 1 Silicon Diode S21314Documento5 páginasLab 1 Silicon Diode S21314Muhd RzwanAinda não há avaliações
- MEGO AFEK Technical Manual 2013Documento46 páginasMEGO AFEK Technical Manual 2013odraci2Ainda não há avaliações
- ATA 24 - ElectricalDocumento68 páginasATA 24 - ElectricalJose JimenezAinda não há avaliações
- GearsDocumento22 páginasGearsAnurag MidhaAinda não há avaliações
- Prevention of Mould Growth in BuildingsDocumento41 páginasPrevention of Mould Growth in BuildingsmaxgyzerAinda não há avaliações
- Ground Improvement PPT ISquareRDocumento19 páginasGround Improvement PPT ISquareRsamAinda não há avaliações
- Fan Coil Unit: TCR TCRQ TFM TC TKM TFRDocumento20 páginasFan Coil Unit: TCR TCRQ TFM TC TKM TFRydsAinda não há avaliações
- Normex Valves Pricelist PDFDocumento2 páginasNormex Valves Pricelist PDFjhony MudAinda não há avaliações
- Future Readymix - Original: K150 K200 Q Cost Q Cost 0.190 3.990 0.190 4.275 0.734 5.072 0.598 0.150 0.678 1.356 2 0.360Documento10 páginasFuture Readymix - Original: K150 K200 Q Cost Q Cost 0.190 3.990 0.190 4.275 0.734 5.072 0.598 0.150 0.678 1.356 2 0.360Mohammed Abd ElazizAinda não há avaliações
- EVERBUILD® EVERFLEX® 565 Clean Room Silicone: Product Data SheetDocumento3 páginasEVERBUILD® EVERFLEX® 565 Clean Room Silicone: Product Data Sheetsamira bashirvandAinda não há avaliações
- Electrical & Information SystemDocumento52 páginasElectrical & Information Systemputra utama dwi suryaAinda não há avaliações
- S2K14 SBU1 PIP DOC 1003 Pipe Class SpecificationDocumento7 páginasS2K14 SBU1 PIP DOC 1003 Pipe Class SpecificationvivekpecAinda não há avaliações
- Western Cabinet Inner and Outer Forming Line Operation MannualDocumento50 páginasWestern Cabinet Inner and Outer Forming Line Operation Mannualvikrant singhAinda não há avaliações
- Geography Form 3 Week 2 Lesson 1 Study PackDocumento8 páginasGeography Form 3 Week 2 Lesson 1 Study PackIss MeAinda não há avaliações
- Sample Science LessonDocumento3 páginasSample Science LessonMelissa BehrendtAinda não há avaliações
- Maintenance & RepairDocumento26 páginasMaintenance & RepairGrid Lock100% (1)
- Lec No.5 Screening RevDocumento11 páginasLec No.5 Screening Revnoel50% (2)
- 49er Owner ManualDocumento27 páginas49er Owner Manualj_abendstern4688Ainda não há avaliações
- Finite Element Analysis of An Overhead Crane BridgeDocumento6 páginasFinite Element Analysis of An Overhead Crane BridgeSebastian PopAinda não há avaliações
- XY 168-3C Desktop Soldering StationDocumento2 páginasXY 168-3C Desktop Soldering StationZach JacobAinda não há avaliações
- MatWeb - The Online Materials Information ResourceDocumento3 páginasMatWeb - The Online Materials Information ResourceVignesh AnbazhaganAinda não há avaliações
- Draft A e A Tank Farm Design GuidelinesDocumento2 páginasDraft A e A Tank Farm Design GuidelinesSigit BintanAinda não há avaliações
- Croz - Beckert PDFDocumento16 páginasCroz - Beckert PDFNeelakandan DAinda não há avaliações