Você também pode gostar
- La ecuación general de segundo grado en dos y tres variablesNo EverandLa ecuación general de segundo grado en dos y tres variablesAinda não há avaliações
- Elemento Viga de TimoshenkoDocumento11 páginasElemento Viga de TimoshenkoLuis Adriano Acosta Pechene100% (1)
- Elemento Triangular 2017 2 PDFDocumento57 páginasElemento Triangular 2017 2 PDFANDRES RIVERAAinda não há avaliações
- Material CuasifragilDocumento35 páginasMaterial CuasifragilEduardo Arriaga ValdezAinda não há avaliações
- Teoría de Vigas de TimoshenkoDocumento3 páginasTeoría de Vigas de TimoshenkoQuishpe M ChristianAinda não há avaliações
- Cálculo de la curva de capacidad sísmica mediante el análisis pushoverDocumento62 páginasCálculo de la curva de capacidad sísmica mediante el análisis pushoverNicole Michelle Andrade GomezAinda não há avaliações
- Se Requiere Diseñar A Torsión Utilizando La Teoría de La Cercha Espacial La Sección de Hormigón Armado de La Figura 8Documento4 páginasSe Requiere Diseñar A Torsión Utilizando La Teoría de La Cercha Espacial La Sección de Hormigón Armado de La Figura 8Jefferson Guanoluisa SantosAinda não há avaliações
- MANUAL DE CÁLCULO DE CORTANTE BASALDocumento10 páginasMANUAL DE CÁLCULO DE CORTANTE BASALpablocesarhr100% (1)
- Análisis Estructural Edificio SAP200Documento40 páginasAnálisis Estructural Edificio SAP200Andres Fernandez Hidalgo100% (1)
- Diseño de Placa Maciza en Sap2000Documento10 páginasDiseño de Placa Maciza en Sap2000Rutbel RuedaAinda não há avaliações
- Analisis de Viga de TimoshenkoDocumento4 páginasAnalisis de Viga de TimoshenkoWendell Ariel LanzasAinda não há avaliações
- Ejercicios de DeflexionesDocumento1 páginaEjercicios de DeflexionesAnghela CorralesAinda não há avaliações
- Diseño sísmico según AASHTO LRFD BridgeDocumento5 páginasDiseño sísmico según AASHTO LRFD BridgeJon PruittAinda não há avaliações
- Superficies de FluenciaDocumento15 páginasSuperficies de FluenciaIvan Huaman Segura100% (1)
- Porticos PresforzadosDocumento38 páginasPorticos PresforzadosMauricio Angulo100% (1)
- Coordenadas Sectoriales PDFDocumento7 páginasCoordenadas Sectoriales PDFFranco OrtegaAinda não há avaliações
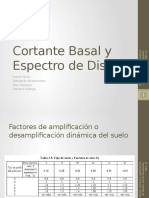
- Cortante Basal y Espectro de DiseñoDocumento16 páginasCortante Basal y Espectro de DiseñoJosé Sebastián BustamanteAinda não há avaliações
- 6 Etabs Edificio de 5 Niveles Con Losa Macisa y ReticularDocumento10 páginas6 Etabs Edificio de 5 Niveles Con Losa Macisa y ReticularCiro Franz Mucha MaytaAinda não há avaliações
- Teoría de Timoshenko para vigas gruesasDocumento6 páginasTeoría de Timoshenko para vigas gruesasBeth Galvez100% (1)
- Zapata de MedianeríaDocumento6 páginasZapata de MedianeríaEnriqueIllanesAinda não há avaliações
- 09) Ing. Cimentaciones - Clase 9 Contrafuertes (10!02!16)Documento38 páginas09) Ing. Cimentaciones - Clase 9 Contrafuertes (10!02!16)Christian Quijada BenitoAinda não há avaliações
- Examen Final Dinamica Virtual I-2020Documento1 páginaExamen Final Dinamica Virtual I-2020Maicol Angel Soto GalindoAinda não há avaliações
- Instalar OpenSees paso a paso guía completaDocumento2 páginasInstalar OpenSees paso a paso guía completaOscar Ortiz MéndezAinda não há avaliações
- Análisis estático y diseño de edificios en hormigónDocumento5 páginasAnálisis estático y diseño de edificios en hormigónKevin AnguloAinda não há avaliações
- HP - Cap 6Documento12 páginasHP - Cap 6Jasson Perez NogalesAinda não há avaliações
- Barra de Seccion Variable Ejemplo BasicoDocumento5 páginasBarra de Seccion Variable Ejemplo BasicoLuis MontoyaAinda não há avaliações
- 04a EF Vigas EulerBernoulliDocumento78 páginas04a EF Vigas EulerBernoulliDiego Andrés Alvarez Marin100% (1)
- Diseño de vigas pretensadas para puenteDocumento1 páginaDiseño de vigas pretensadas para puenteRichar Calizaya CarvajalAinda não há avaliações
- Tarea N°2-Diseño de Columna A Flexo-CompDocumento1 páginaTarea N°2-Diseño de Columna A Flexo-Compdanielcolina1613Ainda não há avaliações
- Resolución de examen de unidad sobre diseño sismo resistenteDocumento3 páginasResolución de examen de unidad sobre diseño sismo resistente1yagami1100% (2)
- Factor de Longitud EfectivaDocumento12 páginasFactor de Longitud EfectivaDiederich GarcíaAinda não há avaliações
- Método Pushover Análisis Estático No Lineal AENLDocumento2 páginasMétodo Pushover Análisis Estático No Lineal AENLSimasero CeroAinda não há avaliações
- Desarrollo Del Metodo Bielas y TirantesDocumento14 páginasDesarrollo Del Metodo Bielas y TirantesAlan ValdezAinda não há avaliações
- 4 Análisis FlexiónDocumento32 páginas4 Análisis FlexiónJoséLuisCorreaAinda não há avaliações
- Ejemplo2 Zapata CorridaDocumento21 páginasEjemplo2 Zapata CorridaDeybet Alvarado100% (1)
- METODO DE CAQUOT Final (Modo de Compatibilidad) PDFDocumento10 páginasMETODO DE CAQUOT Final (Modo de Compatibilidad) PDFAnonymous mnyCjzP5Ainda não há avaliações
- Formulario Hormigón PresforzadoDocumento1 páginaFormulario Hormigón PresforzadoNestorin RodriguezAinda não há avaliações
- Boliviana IrregularDocumento29 páginasBoliviana IrregularCarlos Alejandro MendozaAinda não há avaliações
- Análisis Estructural 1 Clase 9Documento41 páginasAnálisis Estructural 1 Clase 9Hollman Putoy LópezAinda não há avaliações
- Cercha Ejemplo41Documento21 páginasCercha Ejemplo41Pablo QuispeAinda não há avaliações
- Cap. 9 - Zapatas ContinuasDocumento29 páginasCap. 9 - Zapatas ContinuasRonald Aruquipa Hurtado100% (1)
- Diseño Por CapacidadDocumento21 páginasDiseño Por CapacidadElmerChoqueUruri0% (1)
- Cálculo de La Sección TransformadaDocumento2 páginasCálculo de La Sección TransformadaHarry Eyving Cifuentes GarciaAinda não há avaliações
- Fundacion ElasticaDocumento58 páginasFundacion ElasticaEduardo ArmentaAinda não há avaliações
- Metodo de Hardy Cross en MathCadDocumento2 páginasMetodo de Hardy Cross en MathCadAndrés AiffilAinda não há avaliações
- Tarea2 - Puentes Con Csi BridgeDocumento15 páginasTarea2 - Puentes Con Csi BridgeLeoncio CarrascoAinda não há avaliações
- Mathcad - Importar Archivos ExcelDocumento7 páginasMathcad - Importar Archivos ExcelCarlos Manuel Obreque SilvaAinda não há avaliações
- Evaluación del factor R para marcos resistentes a momentoDocumento7 páginasEvaluación del factor R para marcos resistentes a momentoSergio TapiaAinda não há avaliações
- Portico EquivalenteDocumento21 páginasPortico EquivalenteGuillermo M. Alba Neciosup100% (2)
- T02-Residuos PonderadosDocumento13 páginasT02-Residuos PonderadosJulián Jair Cadena SánchezAinda não há avaliações
- Análisis de Una Viga en VoladizoDocumento3 páginasAnálisis de Una Viga en VoladizoMarilyn CoroAinda não há avaliações
- Aplastamiento Agujeros Tornillos PDFDocumento2 páginasAplastamiento Agujeros Tornillos PDFcezapeAinda não há avaliações
- Diseño de Acero Estructural - JOSEPH E. BOWLESDocumento621 páginasDiseño de Acero Estructural - JOSEPH E. BOWLESAlfredo Del Rio LambisAinda não há avaliações
- Problemas MefDocumento82 páginasProblemas MefAnderson Camacho GutiérrezAinda não há avaliações
- Elementos Unidimensionales MefDocumento81 páginasElementos Unidimensionales Mefvladimiroh684Ainda não há avaliações
- Aplicación del método de elementos finitos para estructuras en estado de tensión o deformación planaDocumento27 páginasAplicación del método de elementos finitos para estructuras en estado de tensión o deformación planahenry_hp_1990Ainda não há avaliações
- Repaso 1Documento16 páginasRepaso 1Ernesto RQAinda não há avaliações
- Movimiento de partículas sobre trayectorias curvasDocumento56 páginasMovimiento de partículas sobre trayectorias curvasCallata Enriquez100% (1)
- Integrales y Sus Diferentes Metodos Resolver EcuacionesDocumento13 páginasIntegrales y Sus Diferentes Metodos Resolver EcuacionesDavid EspinozaAinda não há avaliações
- Ejemplo MaximaDocumento10 páginasEjemplo Maximaziemann.janessaAinda não há avaliações
- Trabajo 1 M3 Sol 14Documento14 páginasTrabajo 1 M3 Sol 14ziemann.janessaAinda não há avaliações
- Italiano Senza AiutoDocumento56 páginasItaliano Senza AiutoSuyay DreyAinda não há avaliações
- Vibraciones MecanicasDocumento205 páginasVibraciones MecanicasHUGOAinda não há avaliações
- Programando en Fortran 90Documento118 páginasProgramando en Fortran 90ziemann.janessaAinda não há avaliações
- MS-DOS: Sistema operativo de MicrosoftDocumento4 páginasMS-DOS: Sistema operativo de MicrosoftRafael JimenezAinda não há avaliações
- Articulo Sistema de Proteccion SismicaDocumento37 páginasArticulo Sistema de Proteccion SismicaDiseño de ProyectosAinda não há avaliações
- Guía de Mantenimiento SprocketsDocumento28 páginasGuía de Mantenimiento SprocketsConstanza Charlin MoncadaAinda não há avaliações
- Fernando Barrios CIGC Planta ConcentracionDocumento74 páginasFernando Barrios CIGC Planta ConcentracionLuis Manuel Amario SanchezAinda não há avaliações
- Super Fácil Antena VHF 1Documento4 páginasSuper Fácil Antena VHF 1panaqueespiAinda não há avaliações
- Mecanica de FluidosDocumento9 páginasMecanica de FluidosLaura Margaret Salas SilesAinda não há avaliações
- Arquitectura RacionalistaDocumento14 páginasArquitectura RacionalistaAnonymous LGiR6WuNAinda não há avaliações
- Laboratorio 03 - Cisco Packet Tracer 5.3.2, Instalación y Unos EjerciciosDocumento22 páginasLaboratorio 03 - Cisco Packet Tracer 5.3.2, Instalación y Unos EjerciciosJhon Huaringa0% (1)
- Manual - Sae CajaDocumento84 páginasManual - Sae CajaTiffany Cruz VegaAinda não há avaliações
- Pirrotina y CinabrioDocumento4 páginasPirrotina y CinabrioJOELAinda não há avaliações
- Control de Motores DCDocumento12 páginasControl de Motores DCVaniLux Fernandez100% (3)
- Silla de RuedasDocumento15 páginasSilla de RuedasEddy OrtegaAinda não há avaliações
- Actividad3 DanielaDocumento5 páginasActividad3 Danieladaniela04220% (1)
- Unión de Las Terminales RESUELTODocumento5 páginasUnión de Las Terminales RESUELTOABNER SANTIAGO CAMPOS RAMON0% (1)
- Ejercicios ComplejidadDocumento3 páginasEjercicios ComplejidadLuisa Lorena Rabelo AlmunaAinda não há avaliações
- Libro El Maquinista 3.0Documento351 páginasLibro El Maquinista 3.0Eduard CórdovaAinda não há avaliações
- Transistor de Unión BipolarDocumento30 páginasTransistor de Unión BipolarGerwin AlcalaAinda não há avaliações
- Taller TeoricoDocumento9 páginasTaller TeoricoSteeven EngraciaAinda não há avaliações
- Clase #1Documento8 páginasClase #1BENJAMIN EMANUEL ALMEIDA QUILUMBANGOAinda não há avaliações
- Michael Andres Hidalgo Espejo PDFDocumento3 páginasMichael Andres Hidalgo Espejo PDFMichaelHidalgoEspejoAinda não há avaliações
- Simulación de cascada neumática para secuencia A+B+A-BDocumento7 páginasSimulación de cascada neumática para secuencia A+B+A-BAndres SoriaAinda não há avaliações
- Proyecto Control de Calidad de Bandejas Unidad 1 1Documento3 páginasProyecto Control de Calidad de Bandejas Unidad 1 1Cristian GarcíaAinda não há avaliações
- Lista de Precios 2019 Siemens PDFDocumento237 páginasLista de Precios 2019 Siemens PDFedwin cuellar67% (3)
- Emergencias 19 Al 31 de Diciembre 2022Documento180 páginasEmergencias 19 Al 31 de Diciembre 2022Ferchand EncisoAinda não há avaliações
- Estructura - Fisica - Central - Esterilizacion 2015Documento13 páginasEstructura - Fisica - Central - Esterilizacion 2015Daniela Illanes OlivaAinda não há avaliações
- Sistemas Distribuidos ProDocumento14 páginasSistemas Distribuidos Proandres cusmeAinda não há avaliações
- Ejercicios de probabilidad y estadística sobre poblaciones y muestras aleatoriasDocumento1 páginaEjercicios de probabilidad y estadística sobre poblaciones y muestras aleatoriasValerio Perez BordaAinda não há avaliações
- Expresiones Regulares en JSDocumento3 páginasExpresiones Regulares en JSpatAinda não há avaliações
- CP #6 - Clase 14 - TQDocumento5 páginasCP #6 - Clase 14 - TQAlejandra CruzAinda não há avaliações