Você também pode gostar
- PIC Base C 1Documento0 páginaPIC Base C 1big633Ainda não há avaliações
- PIC Intro 0Documento7 páginasPIC Intro 0Raghavadeep ReddyAinda não há avaliações
- Intermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingNo EverandIntermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingAinda não há avaliações
- PIC IntroDocumento7 páginasPIC IntroMsJojo AlkhouriAinda não há avaliações
- PIC Mid C 1Documento21 páginasPIC Mid C 1I.k. Neena100% (1)
- PIC Intro 0Documento0 páginaPIC Intro 0Cassio SousaAinda não há avaliações
- Programming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CNo EverandProgramming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CAinda não há avaliações
- PIC Development System (Compilers, Simulator andDocumento42 páginasPIC Development System (Compilers, Simulator andPirapuraj PonnampalamAinda não há avaliações
- C Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingNo EverandC Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingAinda não há avaliações
- C Programming of Microcontroller For Hobby RoboticsDocumento14 páginasC Programming of Microcontroller For Hobby RoboticsCMPEAinda não há avaliações
- An Introduction To Programming The Microchip PIC in CDocumento162 páginasAn Introduction To Programming The Microchip PIC in Cagg_mayur1100% (8)
- Programming 8-bit PIC Microcontrollers in C: with Interactive Hardware SimulationNo EverandProgramming 8-bit PIC Microcontrollers in C: with Interactive Hardware SimulationNota: 2.5 de 5 estrelas2.5/5 (5)
- Pic-Programming-With-Ccs-C - (Cuuduongthancong - Com) PDFDocumento135 páginasPic-Programming-With-Ccs-C - (Cuuduongthancong - Com) PDFbenjarrayAinda não há avaliações
- Curso Pic24j60Documento173 páginasCurso Pic24j60Diojan Torres100% (1)
- Master and Command C For PIC MCUsDocumento1 páginaMaster and Command C For PIC MCUsmartinez_cvmAinda não há avaliações
- Porting uCOS-II To A PIC MicrocontrollerDocumento18 páginasPorting uCOS-II To A PIC MicrocontrollerHimanshu SharmaAinda não há avaliações
- C Programming Wizardry: From Zero to Hero in 10 Days: Programming Prodigy: From Novice to Virtuoso in 10 DaysNo EverandC Programming Wizardry: From Zero to Hero in 10 Days: Programming Prodigy: From Novice to Virtuoso in 10 DaysAinda não há avaliações
- Mplab Xc8 Getting Started Guide Mplab XC8 Getting Started GuideDocumento30 páginasMplab Xc8 Getting Started Guide Mplab XC8 Getting Started GuideanandkalodeAinda não há avaliações
- ManualDocumento155 páginasManualJulio Infantes100% (1)
- Pic Basic Pro GuideDocumento120 páginasPic Basic Pro GuideWilliam Garcia BedoyaAinda não há avaliações
- Lab 1 Submission - Microchip MPLAB C18 C Compiler OverviewDocumento4 páginasLab 1 Submission - Microchip MPLAB C18 C Compiler OverviewSravyaAinda não há avaliações
- C Reference Manual - October 2005.13Documento1 páginaC Reference Manual - October 2005.13diegoifgAinda não há avaliações
- Using The CCS C Compiler For Rapid Development of MicrocontrollerDocumento158 páginasUsing The CCS C Compiler For Rapid Development of MicrocontrollerPAUL BALLARTAAinda não há avaliações
- Pick A PIC ProjectDocumento21 páginasPick A PIC ProjectZlatko GrgicAinda não há avaliações
- A Study of Msp430 ToolchainDocumento10 páginasA Study of Msp430 ToolchainTrí ToànAinda não há avaliações
- Electronica - PIC Basic ProDocumento98 páginasElectronica - PIC Basic ProzorrinAinda não há avaliações
- Install Ucosii Ide68kDocumento7 páginasInstall Ucosii Ide68kRockeyAinda não há avaliações
- ES Lab Manual 1Documento95 páginasES Lab Manual 1Rufus DavidAinda não há avaliações
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemNo EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemAinda não há avaliações
- Picbasic ProDocumento55 páginasPicbasic ProLorena GaytanAinda não há avaliações
- Academic Program MICROCHIPDocumento8 páginasAcademic Program MICROCHIPanitat2012Ainda não há avaliações
- Objectives: Lab 8 Introduction To Mikroc LanguageDocumento4 páginasObjectives: Lab 8 Introduction To Mikroc LanguagexorogerAinda não há avaliações
- MCHP Usb Otg Com3202 v095 Lab Manual PhilipDocumento69 páginasMCHP Usb Otg Com3202 v095 Lab Manual PhilipBerat Neslihan100% (2)
- Fatima Michael College of Engineering & Technology Ee6008 - Microcontroller Based System DesignDocumento66 páginasFatima Michael College of Engineering & Technology Ee6008 - Microcontroller Based System DesignsheelaAinda não há avaliações
- PIC Projects and Applications using C: A Project-based ApproachNo EverandPIC Projects and Applications using C: A Project-based ApproachNota: 4 de 5 estrelas4/5 (2)
- PIC Basic CourseDocumento57 páginasPIC Basic Coursetermicas100% (3)
- Pic Micro Pascal V2 Rev GDocumento108 páginasPic Micro Pascal V2 Rev Gjesito2010Ainda não há avaliações
- Cross CompilerDocumento17 páginasCross CompilerKhan Arshid IqbalAinda não há avaliações
- BDS C 1.46 Users Guide Mar82Documento133 páginasBDS C 1.46 Users Guide Mar82Junior MartinsAinda não há avaliações
- 2.tutorial 1 - Implementation of A USB Based PIC-To-PC CommunicationDocumento30 páginas2.tutorial 1 - Implementation of A USB Based PIC-To-PC CommunicationMurat Şen100% (1)
- Keil IntroDocumento3 páginasKeil IntroMechiri Ashok100% (1)
- XC8 MplabDocumento72 páginasXC8 MplabAlex Castillon100% (1)
- ReportDocumento5 páginasReportNitin RajAinda não há avaliações
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 1Documento21 páginasOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 1Tomás BurónAinda não há avaliações
- Pocket PC Compiler: Mini Project ReportDocumento22 páginasPocket PC Compiler: Mini Project ReportAakash TyagiAinda não há avaliações
- Proteus IntroductionDocumento18 páginasProteus IntroductionJoel Sebastian DelgadoAinda não há avaliações
- How To Run MPI Under CodeBlocksDocumento2 páginasHow To Run MPI Under CodeBlockslolo406Ainda não há avaliações
- Chapter 6Documento5 páginasChapter 6kssaravana89Ainda não há avaliações
- 19ELC212 - MCA - Lab ManualDocumento52 páginas19ELC212 - MCA - Lab ManualVatsalya NagAinda não há avaliações
- C Programming For Beginners: The Simple Guide to Learning C Programming Language Fast!No EverandC Programming For Beginners: The Simple Guide to Learning C Programming Language Fast!Nota: 5 de 5 estrelas5/5 (1)
- PlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6No EverandPlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6Ainda não há avaliações
- Embedded C Programming: Techniques and Applications of C and PIC MCUSNo EverandEmbedded C Programming: Techniques and Applications of C and PIC MCUSNota: 3 de 5 estrelas3/5 (3)
- Interfacing PIC Microcontrollers: Embedded Design by Interactive SimulationNo EverandInterfacing PIC Microcontrollers: Embedded Design by Interactive SimulationAinda não há avaliações
- Learn to Code with C: Program with the world's most popular language on your Raspberry PiNo EverandLearn to Code with C: Program with the world's most popular language on your Raspberry PiAinda não há avaliações
- C Clearly - Programming With C In Linux and On Raspberry PiNo EverandC Clearly - Programming With C In Linux and On Raspberry PiAinda não há avaliações
- C Programming: C Programming Language for beginners, teaching you how to learn to code in C fast!No EverandC Programming: C Programming Language for beginners, teaching you how to learn to code in C fast!Ainda não há avaliações
- PIC18F46J50Documento562 páginasPIC18F46J50frank_grimesAinda não há avaliações
- How To Recalibrate A PICDocumento3 páginasHow To Recalibrate A PICfrank_grimesAinda não há avaliações
- Accurate TMR0 InterruptsDocumento6 páginasAccurate TMR0 Interruptsfrank_grimesAinda não há avaliações
- PIC18F46J50 ErrataDocumento12 páginasPIC18F46J50 Erratafrank_grimesAinda não há avaliações
- Passing A Port Pin As An Argument To A Function - MPLAB XC8Documento1 páginaPassing A Port Pin As An Argument To A Function - MPLAB XC8frank_grimesAinda não há avaliações
- 2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)Documento3 páginas2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)frank_grimesAinda não há avaliações
- Receptor Infrarrojo Tsop382Documento7 páginasReceptor Infrarrojo Tsop382frank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDocumento12 páginasMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
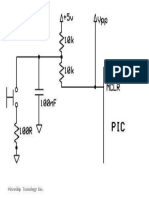
- MCLR Reset CircuitDocumento1 páginaMCLR Reset Circuitfrank_grimesAinda não há avaliações
- Lecture 1 - Manufacturing Process and Process ControlDocumento8 páginasLecture 1 - Manufacturing Process and Process Controlfrank_grimesAinda não há avaliações
- Garnet TutorialDocumento42 páginasGarnet Tutorialfrank_grimesAinda não há avaliações
- Unit 6: Equations of Lines and Planes: Solutions Block 1:vector ArithmeticDocumento27 páginasUnit 6: Equations of Lines and Planes: Solutions Block 1:vector Arithmeticfrank_grimesAinda não há avaliações
- Open Collector Outputs - Signet Sensors PDFDocumento4 páginasOpen Collector Outputs - Signet Sensors PDFfrank_grimesAinda não há avaliações
- Structure: Study Guide Block 1:vector ArithmeticDocumento6 páginasStructure: Study Guide Block 1:vector Arithmeticfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec4 - 300k.mp4: Herbert GrossDocumento15 páginasMITOCW - MITRES - 18-007 - Part3 - Lec4 - 300k.mp4: Herbert Grossfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec2 - 300k.mp4: ProfessorDocumento14 páginasMITOCW - MITRES - 18-007 - Part3 - Lec2 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec3 - 300k.mp4: ProfessorDocumento13 páginasMITOCW - MITRES - 18-007 - Part3 - Lec3 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part2 - Lec1 - 300k.mp4: ProfessorDocumento16 páginasMITOCW - MITRES - 18-007 - Part2 - Lec1 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part1 - Lec3 - 300k.mp4: ProfessorDocumento11 páginasMITOCW - MITRES - 18-007 - Part1 - Lec3 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec1 - 300k.mp4: Herbert GrossDocumento13 páginasMITOCW - MITRES - 18-007 - Part3 - Lec1 - 300k.mp4: Herbert Grossfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part1 - Lec1 - 300k.mp4: ProfessorDocumento8 páginasMITOCW - MITRES - 18-007 - Part1 - Lec1 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- Times Interest Earned Ratio: Compare Interest Payments With Income Available To Pay ThemDocumento13 páginasTimes Interest Earned Ratio: Compare Interest Payments With Income Available To Pay Themfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part1 - Lec2 - 300k.mp4: Herbert GrossDocumento11 páginasMITOCW - MITRES - 18-007 - Part1 - Lec2 - 300k.mp4: Herbert Grossfrank_grimesAinda não há avaliações
- Y9sa8stsx MDocumento12 páginasY9sa8stsx Mfrank_grimesAinda não há avaliações
- What Are Batch Element Entry (BEE) ?: B E E (BEE)Documento20 páginasWhat Are Batch Element Entry (BEE) ?: B E E (BEE)arun9698Ainda não há avaliações
- Darshan TradingDocumento61 páginasDarshan TradingShobha SinghAinda não há avaliações
- ShreemantoLahiri - v3Documento1 páginaShreemantoLahiri - v3Ayush SaxenaAinda não há avaliações
- Laptop Sebagai Teman Siswa: Laptop As Students' FriendDocumento1 páginaLaptop Sebagai Teman Siswa: Laptop As Students' Friendtigor lianda manik07Ainda não há avaliações
- Types of Computer Networks: Maninder KaurDocumento18 páginasTypes of Computer Networks: Maninder Kaurdaniel ayobamiAinda não há avaliações
- Define Field SelectionDocumento3 páginasDefine Field SelectionSenthil NayagamAinda não há avaliações
- Safety Manual (B-80687EN 10)Documento35 páginasSafety Manual (B-80687EN 10)Jander Luiz TomaziAinda não há avaliações
- Course Outline: ABE 105 - AB Power EngineeringDocumento2 páginasCourse Outline: ABE 105 - AB Power EngineeringKaren Joy BabidaAinda não há avaliações
- 7.2.5 APQP Phase 2 Checklist Dec 2013Documento21 páginas7.2.5 APQP Phase 2 Checklist Dec 2013Mani Rathinam RajamaniAinda não há avaliações
- Module 1 (Social Innovation)Documento7 páginasModule 1 (Social Innovation)Marinette Medrano50% (2)
- G U - ResumeDocumento3 páginasG U - ResumeNaveen_naidu1Ainda não há avaliações
- Implementing Global Human Resources PDFDocumento486 páginasImplementing Global Human Resources PDFme.atulAinda não há avaliações
- Chembiooffice Version 14.0: Hardware & Software GuideDocumento4 páginasChembiooffice Version 14.0: Hardware & Software GuideSamuel BlakeAinda não há avaliações
- 8 Latest Kitchen Chimney Brands in India 2020Documento4 páginas8 Latest Kitchen Chimney Brands in India 2020Sulagna ChowdhuryAinda não há avaliações
- Mathsoft Group 1 BBMDocumento7 páginasMathsoft Group 1 BBMBrandon DeanAinda não há avaliações
- Multicast Routing Protocols in Wireless Sensor Networks (WSNS)Documento9 páginasMulticast Routing Protocols in Wireless Sensor Networks (WSNS)Journal of Computing100% (1)
- IPLOOK SMS Product Information V1.3Documento14 páginasIPLOOK SMS Product Information V1.3IPLOOK TechnologiesAinda não há avaliações
- Conveyor Safety Switches 2 5Documento16 páginasConveyor Safety Switches 2 5yatinthoratscrbAinda não há avaliações
- Vessel Technical BrochureDocumento26 páginasVessel Technical BrochureMonica IorgulescuAinda não há avaliações
- Safety Culture in Nuclear InstalationsDocumento98 páginasSafety Culture in Nuclear InstalationschrissbansAinda não há avaliações
- SynchronizationDocumento114 páginasSynchronizationSudha PatelAinda não há avaliações
- 1.final Concept Sheet PDFDocumento1 página1.final Concept Sheet PDFShruti JhaAinda não há avaliações
- Fully Automated 3D Colon Segmentation and Volume Rendering in Virtual RealityDocumento9 páginasFully Automated 3D Colon Segmentation and Volume Rendering in Virtual RealityJamil Al-idrusAinda não há avaliações
- IMSCIM V1 Manual PDFDocumento8 páginasIMSCIM V1 Manual PDFFiroDjinsoNanoAinda não há avaliações
- Pa0043 Sub Conor O'donnell PDFDocumento7 páginasPa0043 Sub Conor O'donnell PDFTheNewChildrensHospitalAinda não há avaliações
- Bangalore It Companies Directory PDFDocumento168 páginasBangalore It Companies Directory PDFdeepakraj2005Ainda não há avaliações
- Saxby KatalogDocumento163 páginasSaxby KatalogjaAinda não há avaliações
- Implementing Accounting HubDocumento258 páginasImplementing Accounting HubNarendra ReddyAinda não há avaliações
- Future MuseumDocumento12 páginasFuture MuseumPatriciaAinda não há avaliações
- FPSO Swivel Load MonitoringDocumento1 páginaFPSO Swivel Load MonitoringKim OanhAinda não há avaliações