Você também pode gostar
- Sistema de Controle de Um Boeing 747Documento13 páginasSistema de Controle de Um Boeing 747Diego PeixotoAinda não há avaliações
- Projeto Integrado P3Documento1 páginaProjeto Integrado P3Altair O. P. PassosAinda não há avaliações
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- Analise Dos ResultadosDocumento17 páginasAnalise Dos ResultadosDayanaAinda não há avaliações
- Projeto de sistemas de controle pelo método do lugar das raízesDocumento28 páginasProjeto de sistemas de controle pelo método do lugar das raízesNathan RodriguesAinda não há avaliações
- Aula4 Controlador L. Das Raízes - Avanço de FaseDocumento43 páginasAula4 Controlador L. Das Raízes - Avanço de Fasemanolomay838Ainda não há avaliações
- Controlo PID Discreto: Métodos de Sintonização e ModificaçõesDocumento7 páginasControlo PID Discreto: Métodos de Sintonização e ModificaçõesRaniere LiraAinda não há avaliações
- Controle PID: Teoria e Projeto de ControladoresDocumento29 páginasControle PID: Teoria e Projeto de ControladoresTiago BitencourtAinda não há avaliações
- Compensação em AtrasoDocumento19 páginasCompensação em AtrasoVictor LinharesAinda não há avaliações
- Trabalho ChanceDocumento2 páginasTrabalho ChanceEudes RafaelAinda não há avaliações
- Laboratório de Sistemas de Controle 2 - Relatório 4Documento12 páginasLaboratório de Sistemas de Controle 2 - Relatório 4Daniel P.Ainda não há avaliações
- Modelagem Matamática e Controle de Um Sistema "Ball and Beam"Documento21 páginasModelagem Matamática e Controle de Um Sistema "Ball and Beam"americo079Ainda não há avaliações
- AULA 08 - LTC37B Controle 02 - Projeto de Servossistemas do Tipo 1Documento32 páginasAULA 08 - LTC37B Controle 02 - Projeto de Servossistemas do Tipo 1Michel FiuzaAinda não há avaliações
- Modelagem de Um Sistema Bola e Barra (Ball and Beam)Documento22 páginasModelagem de Um Sistema Bola e Barra (Ball and Beam)americo079100% (1)
- Atividade Prática - 2018 - Modulo C - Fase I - Controle DiscretoDocumento6 páginasAtividade Prática - 2018 - Modulo C - Fase I - Controle DiscretoCiro DenizAinda não há avaliações
- Controladores PIDDocumento26 páginasControladores PIDRejane BarbosaAinda não há avaliações
- Aula 10 Pid Via Lugar Das RaizesDocumento41 páginasAula 10 Pid Via Lugar Das Raizesdanitranoster8512Ainda não há avaliações
- Implementando PID em sistemas embarcadosDocumento44 páginasImplementando PID em sistemas embarcadosThiago WerneckAinda não há avaliações
- Relatório - Exp1 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento20 páginasRelatório - Exp1 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. ZucatelliAinda não há avaliações
- Melhoria do Erro e Resposta com Controlador PIDDocumento7 páginasMelhoria do Erro e Resposta com Controlador PIDGuilherme XavierAinda não há avaliações
- Ativ. Controle DiscretoDocumento6 páginasAtiv. Controle DiscretoNoemar GiombelliAinda não há avaliações
- A3 MatheusDocumento11 páginasA3 MatheusMatheus EduardoAinda não há avaliações
- Controle LED 40Documento10 páginasControle LED 40Camila A. CostaAinda não há avaliações
- Controladores PID usando amplificadores operacionaisDocumento3 páginasControladores PID usando amplificadores operacionaisRúben BarbosaAinda não há avaliações
- Lab 4 SCMDocumento11 páginasLab 4 SCMCaetano PellegrinAinda não há avaliações
- Coau-Ft 01BDocumento40 páginasCoau-Ft 01BbentoAinda não há avaliações
- Lista de Exercício - P2 - Controle - Linear - IDocumento6 páginasLista de Exercício - P2 - Controle - Linear - IVinicius RamosAinda não há avaliações
- Apresentação 06-07-23-Grupo 01-Felipe, Gustavo, JoãoDocumento38 páginasApresentação 06-07-23-Grupo 01-Felipe, Gustavo, JoãoFelipe Procopio Rosa CostaAinda não há avaliações
- Mecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCDocumento8 páginasMecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCMarcelo SilvaAinda não há avaliações
- Lab 7Documento3 páginasLab 7Victor EmanuelAinda não há avaliações
- A3 Sistemas Digitais-3Documento11 páginasA3 Sistemas Digitais-3diegoml132453Ainda não há avaliações
- Roteiro Do Trabalho LSCCDocumento3 páginasRoteiro Do Trabalho LSCCRodrigo ResendeAinda não há avaliações
- RELATÓRIO 1 - Implementação de Controladores Digitais de Processo Industriais - COMPLETODocumento18 páginasRELATÓRIO 1 - Implementação de Controladores Digitais de Processo Industriais - COMPLETORaniere LiraAinda não há avaliações
- Automa o e Controle I Projeto Via Lugar Geom Trico Das Ra ZesDocumento36 páginasAutoma o e Controle I Projeto Via Lugar Geom Trico Das Ra ZesFelipe MendesAinda não há avaliações
- SC66B_Lab5Documento6 páginasSC66B_Lab5WB UTFPRAinda não há avaliações
- P5 - Identificação (Aeropêndulo) PDFDocumento9 páginasP5 - Identificação (Aeropêndulo) PDFAndre MenescalAinda não há avaliações
- Engenharia Elétrica Controle Fase CompensadorDocumento24 páginasEngenharia Elétrica Controle Fase CompensadorRAFAEL FREITAS FERREIRAAinda não há avaliações
- Cap 4 Caminho de Dados e ControleDocumento62 páginasCap 4 Caminho de Dados e ControleIgor GledsonAinda não há avaliações
- Relatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento22 páginasRelatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. Zucatelli100% (1)
- Solução P1 2020Documento10 páginasSolução P1 2020Lucas MorthAinda não há avaliações
- Sistema Microprocessado para Controle de Posição AngularDocumento14 páginasSistema Microprocessado para Controle de Posição AngularÉlisson RíllerAinda não há avaliações
- Aula 05 - Modelos de sistemas físicos e função de transferênciaDocumento19 páginasAula 05 - Modelos de sistemas físicos e função de transferênciaFranciele GomesAinda não há avaliações
- Trabalho Final - Controle DigitalDocumento35 páginasTrabalho Final - Controle DigitalWesleyAinda não há avaliações
- Controle de velocidade de motor CC com sinal analógicoDocumento5 páginasControle de velocidade de motor CC com sinal analógicoLeonardo CampagnolloAinda não há avaliações
- Controle de sistemas lineares com amplificadores operacionaisDocumento19 páginasControle de sistemas lineares com amplificadores operacionaisDiego YanezAinda não há avaliações
- Aps 2Documento5 páginasAps 2Gustavo RochaAinda não há avaliações
- Relatório 3 Controle 2 Mateus Lopes Stefano PontelliDocumento3 páginasRelatório 3 Controle 2 Mateus Lopes Stefano PontelliMateus Lopes Do NascimentoAinda não há avaliações
- Relatório - Projeto 1 - Root LocusDocumento27 páginasRelatório - Projeto 1 - Root LocusLEONARDO GOMES DA SILVAAinda não há avaliações
- Controle1 - Prova2 - 2021 AV2Documento6 páginasControle1 - Prova2 - 2021 AV2Marcantoni TavaresAinda não há avaliações
- Aula 16 - Compensadores e Lugar Das RaizesDocumento5 páginasAula 16 - Compensadores e Lugar Das RaizesBruno De MattosAinda não há avaliações
- Circuito de varredura e controle de luminosidade com acelerômetroDocumento7 páginasCircuito de varredura e controle de luminosidade com acelerômetroGustavo MelnecenkoAinda não há avaliações
- Equipe1 - Relatório - Level ControlDocumento6 páginasEquipe1 - Relatório - Level ControlItamar JuniorAinda não há avaliações
- Sintonia manual de controladores PID em processos industriaisDocumento43 páginasSintonia manual de controladores PID em processos industriaisAline CastroAinda não há avaliações
- Sistemas de controle discretosDocumento76 páginasSistemas de controle discretoswhatahellAinda não há avaliações
- Curso Automação CLPDocumento75 páginasCurso Automação CLPabsu2278Ainda não há avaliações
- Especificações No Domínio Do TempoDocumento41 páginasEspecificações No Domínio Do TempoRedação PaxAinda não há avaliações
- Lab-08 Tacometro InterrupcoesDocumento4 páginasLab-08 Tacometro InterrupcoesEvandro Fernandes LedemaAinda não há avaliações
- Apostila de Máquinas Hidráulicas e PneumáticasDocumento33 páginasApostila de Máquinas Hidráulicas e PneumáticasTiago PaulinoAinda não há avaliações
- Exemplo SedimDocumento16 páginasExemplo SedimMateus Dória100% (1)
- Análise de projeto de torre de absorção com colunas de recheioDocumento47 páginasAnálise de projeto de torre de absorção com colunas de recheiopauloAinda não há avaliações
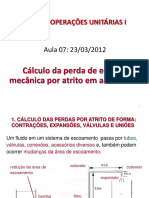
- Aula07 PerdalocalizadaDocumento39 páginasAula07 PerdalocalizadafcarregariAinda não há avaliações
- Aula 5Documento16 páginasAula 5David LunaAinda não há avaliações
- Gestão de CarreiraDocumento18 páginasGestão de CarreiraMateus DóriaAinda não há avaliações
- Questóes Tipicas de ProvaDocumento1 páginaQuestóes Tipicas de ProvaMateus DóriaAinda não há avaliações
- Lista 3 - Engd06Documento3 páginasLista 3 - Engd06Mateus DóriaAinda não há avaliações
- Avaliação 1Documento2 páginasAvaliação 1Mateus DóriaAinda não há avaliações
- Seminario1 PDFDocumento28 páginasSeminario1 PDFMateus DóriaAinda não há avaliações
- Prova 8 - Técnico (A) de Operação JúniorDocumento17 páginasProva 8 - Técnico (A) de Operação JúniorMateus DóriaAinda não há avaliações
- Aula 5Documento16 páginasAula 5David LunaAinda não há avaliações
- ZapzapDocumento1 páginaZapzapMateus DóriaAinda não há avaliações
- TraduçãoDocumento1 páginaTraduçãoMateus DóriaAinda não há avaliações
- Hays 484258Documento6 páginasHays 484258Mateus DóriaAinda não há avaliações
- Imagens históricas de SalvadorDocumento62 páginasImagens históricas de SalvadorLeo RudáAinda não há avaliações
- FISPQ AcidoAceticoGlacialDocumento7 páginasFISPQ AcidoAceticoGlacialMateus DóriaAinda não há avaliações
- Resumo de dados em Tabelas de frequênciaDocumento41 páginasResumo de dados em Tabelas de frequênciaWesleyCamposAraujpAinda não há avaliações
- Álcool isopropílico PA FISSADocumento6 páginasÁlcool isopropílico PA FISSAMateus DóriaAinda não há avaliações
- Sulfato de SódioDocumento3 páginasSulfato de SódioDeborah S. FructuosoAinda não há avaliações
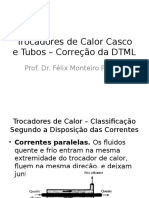
- Casco TubosDocumento30 páginasCasco TubosMateus DóriaAinda não há avaliações
- Laboratório de Instalaçoes Eletricas - POLI - USP - TrifásicosDocumento50 páginasLaboratório de Instalaçoes Eletricas - POLI - USP - TrifásicosVictor HugoAinda não há avaliações
- LalaalalalalalDocumento1 páginaLalaalalalalalMateus DóriaAinda não há avaliações
- Vigiarepunir - Resenha PDFDocumento9 páginasVigiarepunir - Resenha PDFstachovskiAinda não há avaliações
- Fispq SodioDocumento5 páginasFispq SodioMateus DóriaAinda não há avaliações
- Fispq SodioDocumento5 páginasFispq SodioMateus DóriaAinda não há avaliações
- Síntese Do Ácido AcetilsalicílicoDocumento10 páginasSíntese Do Ácido AcetilsalicílicoMateus DóriaAinda não há avaliações
- Calculo 21Documento17 páginasCalculo 21edmo.henriqueAinda não há avaliações
- Ácido ClorídricoDocumento3 páginasÁcido ClorídricoMateus DóriaAinda não há avaliações
- Solução estrutural do centro comercial El Corte Inglés em GaiaDocumento10 páginasSolução estrutural do centro comercial El Corte Inglés em GaiaSergio CunhaAinda não há avaliações
- Aula 7 Cisalhamento Puro (Ajustado)Documento27 páginasAula 7 Cisalhamento Puro (Ajustado)Gabriela MellerAinda não há avaliações
- ABNT NBR 7181 - 1984 - Solo - Análise GranulométricaDocumento13 páginasABNT NBR 7181 - 1984 - Solo - Análise GranulométricaJulianaAinda não há avaliações
- Análise de estruturas isostáticas por linhas de influênciaDocumento27 páginasAnálise de estruturas isostáticas por linhas de influênciaEder ChagasAinda não há avaliações
- Fundações rasas construção civilDocumento21 páginasFundações rasas construção civilPriscila Caroline ZanattaAinda não há avaliações
- Análise de desempenho e custo de lajes maciças e pré-moldadasDocumento3 páginasAnálise de desempenho e custo de lajes maciças e pré-moldadasGabriel Blanc CoelhoAinda não há avaliações
- Processo Gráfico CulmannDocumento15 páginasProcesso Gráfico CulmannTales ManfroiAinda não há avaliações
- Materiais dentários para restauração e proteção pulparDocumento7 páginasMateriais dentários para restauração e proteção pulparPatrícia Galvão100% (1)
- Manutenção preventiva de máquina de moldagemDocumento4 páginasManutenção preventiva de máquina de moldagemDiego Cadore100% (8)
- Distribuição de tensões em solos - Exercícios resolvidosDocumento24 páginasDistribuição de tensões em solos - Exercícios resolvidosFADONS100% (2)
- Parede de Garrafa PetDocumento6 páginasParede de Garrafa PetSocorro HonorataAinda não há avaliações
- Dimensionamento e Detalhamento Da Armadura de Suspensão Nas VigasDocumento7 páginasDimensionamento e Detalhamento Da Armadura de Suspensão Nas VigasMSampaAinda não há avaliações
- História da NitroceluloseDocumento15 páginasHistória da NitrocelulosedadoelguapoAinda não há avaliações
- 1°+Lista+de+Exercícios+-+Resistência+dos+materiaisDocumento6 páginas1°+Lista+de+Exercícios+-+Resistência+dos+materiaisRenato WaiandtAinda não há avaliações
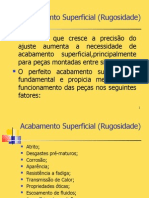
- Apresentação 9 - Rugosidade e OndulaçãoDocumento58 páginasApresentação 9 - Rugosidade e OndulaçãoosmarkAinda não há avaliações
- AberturaDocumento65 páginasAberturaGliciel RodrigoAinda não há avaliações
- Fundamentos da Especificação e Seleção de MATERIAIS para Projeto MecânicoDocumento18 páginasFundamentos da Especificação e Seleção de MATERIAIS para Projeto MecânicoAndré BoulancoAinda não há avaliações
- Análise experimental da perda de carga em condutosDocumento16 páginasAnálise experimental da perda de carga em condutosAnna LauraAinda não há avaliações
- Mecanismos de Endurecimento MetalDocumento3 páginasMecanismos de Endurecimento Metalpmlsilva100% (1)
- Construção de um Destilador Caseiro com Materiais de Baixo CustoDocumento6 páginasConstrução de um Destilador Caseiro com Materiais de Baixo CustoVanessa LealAinda não há avaliações
- Calibração do densímetro para análise de soloDocumento6 páginasCalibração do densímetro para análise de soloJuliana100% (1)
- Estruturas - PILAR e SAPATA - Prof DANILO ABREU - Vs222Documento4 páginasEstruturas - PILAR e SAPATA - Prof DANILO ABREU - Vs222Junior MirandaAinda não há avaliações
- Afiar facas corretamenteDocumento1 páginaAfiar facas corretamentejuiltonAinda não há avaliações
- Concresive 90Documento3 páginasConcresive 90Klarc CamachoAinda não há avaliações
- Vidrarias de LaboratorioDocumento8 páginasVidrarias de LaboratoriomarcoswbarrosAinda não há avaliações
- ManobraDocumento6 páginasManobraJorgelino ParkerAinda não há avaliações
- Exercicios EnsaiosDocumento9 páginasExercicios EnsaiosVictor AbreuAinda não há avaliações
- Noções de Arquivamento e ProcedimentosDocumento12 páginasNoções de Arquivamento e Procedimentosfariasb3Ainda não há avaliações
- 5° Trabalho Vibrações PDFDocumento5 páginas5° Trabalho Vibrações PDFJanderson Honorio Mazzine AfonsoAinda não há avaliações
- A história da ciência para quem tem pressa: De Galileu a Stephen Hawking em 200 páginas!No EverandA história da ciência para quem tem pressa: De Galileu a Stephen Hawking em 200 páginas!Nota: 4.5 de 5 estrelas4.5/5 (5)
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- DNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.No EverandDNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.Nota: 5 de 5 estrelas5/5 (1)
- Apostila Introdução À Comunicação De Dados E Redes De ComputadoresNo EverandApostila Introdução À Comunicação De Dados E Redes De ComputadoresAinda não há avaliações
- Um Primeiro Curso Direto De Calculo Diferencial E IntegralNo EverandUm Primeiro Curso Direto De Calculo Diferencial E IntegralAinda não há avaliações