Você também pode gostar
- CollegeAlgebra LRDocumento1.150 páginasCollegeAlgebra LRJd DibrellAinda não há avaliações
- A-level Maths Revision: Cheeky Revision ShortcutsNo EverandA-level Maths Revision: Cheeky Revision ShortcutsNota: 3.5 de 5 estrelas3.5/5 (8)
- Frequently Asked C Programs in InterviewDocumento8 páginasFrequently Asked C Programs in InterviewNandha Kumar100% (5)
- D-H Problems PDFDocumento9 páginasD-H Problems PDFkrupachariAinda não há avaliações
- Hybrid Fuzzy First Principles ModelingDocumento273 páginasHybrid Fuzzy First Principles ModelingCesar Augusto GarechAinda não há avaliações
- Percentiles For Grouped Data and Percentile RankDocumento52 páginasPercentiles For Grouped Data and Percentile RankMyrna Miraflor0% (1)
- Morison's EquationDocumento25 páginasMorison's Equation금동민Ainda não há avaliações
- Clustering 2Documento80 páginasClustering 2shruti katareAinda não há avaliações
- Chapter 9-Parametric Equations and Polar CooordinatesDocumento80 páginasChapter 9-Parametric Equations and Polar CooordinatesRiyad MohammedAinda não há avaliações
- Math WorksheetsDocumento18 páginasMath WorksheetsReysa m.duatinAinda não há avaliações
- 2 Parametric CurvesDocumento10 páginas2 Parametric CurvesPhenias ManyashaAinda não há avaliações
- Day 19Documento9 páginasDay 19Groleo MuttAinda não há avaliações
- Computer Graphics (CSE 4103)Documento18 páginasComputer Graphics (CSE 4103)Ashfaqul Islam TonmoyAinda não há avaliações
- UNO1997 Algorithms For Enumerating All Perfect Maximum and Maximal Matchings in Bipartite GraphsDocumento10 páginasUNO1997 Algorithms For Enumerating All Perfect Maximum and Maximal Matchings in Bipartite Graphshans wurstAinda não há avaliações
- Curvature of Digital CurvesDocumento12 páginasCurvature of Digital CurvesMichael HeydtAinda não há avaliações
- DS48 269Documento8 páginasDS48 269truva_kissAinda não há avaliações
- Shape Matching: Similarity Measures and AlgorithmsDocumento10 páginasShape Matching: Similarity Measures and AlgorithmsMiguel Angel Segura TimoteoAinda não há avaliações
- Lecture 4 (Compatibility Mode)Documento26 páginasLecture 4 (Compatibility Mode)Anonymous dGnj3bZAinda não há avaliações
- Blending FunctionsDocumento8 páginasBlending Functionsayu7kajiAinda não há avaliações
- Curves For Computer Aided Geometric DesignDocumento21 páginasCurves For Computer Aided Geometric Designsri999Ainda não há avaliações
- Application: The DCT and JPEG Image and Video Processing Dr. Anil Kokaram Anil - Kokaram@tcd - IeDocumento24 páginasApplication: The DCT and JPEG Image and Video Processing Dr. Anil Kokaram Anil - Kokaram@tcd - IeAdrian Mihai MicleaAinda não há avaliações
- Basic Curves and Surface Modeling - CADDocumento69 páginasBasic Curves and Surface Modeling - CADDr. Ajay M PatelAinda não há avaliações
- Feynman Diagrams and Cutting Rules: J.S. RozowskyDocumento22 páginasFeynman Diagrams and Cutting Rules: J.S. RozowskyAwais HaiderAinda não há avaliações
- Fast and Accurate Clothoid FittingDocumento14 páginasFast and Accurate Clothoid FittingmperelmuterAinda não há avaliações
- Ps 2Documento3 páginasPs 2baoke renAinda não há avaliações
- Solution 2Documento5 páginasSolution 2Paulina MarquezAinda não há avaliações
- Symmetry and Bandwidth: AE and Bars 3, 4, 5, and 6Documento11 páginasSymmetry and Bandwidth: AE and Bars 3, 4, 5, and 6Hilary WatsonAinda não há avaliações
- Reflection-Mirror Through An Arbitrary PlaneDocumento12 páginasReflection-Mirror Through An Arbitrary PlaneIgor GjorgjievAinda não há avaliações
- A Clarifying Note On Converting To Log-Deviations From The Steady StateDocumento15 páginasA Clarifying Note On Converting To Log-Deviations From The Steady Statebao_ngoc_angelAinda não há avaliações
- FreudDocumento15 páginasFreudKrishnanath ReghunadhanAinda não há avaliações
- CG QnaDocumento13 páginasCG QnaabcAinda não há avaliações
- Drawing Using The Scorbot Manipulator ArmDocumento17 páginasDrawing Using The Scorbot Manipulator Armlfc_hotmail4253Ainda não há avaliações
- Akima InterpolationDocumento14 páginasAkima Interpolationmarcosipa70% (1)
- Function Generation Using Freudenstein's EquationDocumento15 páginasFunction Generation Using Freudenstein's Equationvenkatanaveen306Ainda não há avaliações
- Arc ParamDocumento10 páginasArc ParamgomsonAinda não há avaliações
- MCMC Final EditionDocumento17 páginasMCMC Final EditionYou ZhaoAinda não há avaliações
- 6002 Notes 07 L16Documento27 páginas6002 Notes 07 L16Mandar PatilAinda não há avaliações
- Merging Bezier CurvesDocumento10 páginasMerging Bezier CurvesapoclyteAinda não há avaliações
- Definition of Parametric EquationsDocumento33 páginasDefinition of Parametric EquationsZhichein WongAinda não há avaliações
- Chapter 3 Scan ConversionDocumento24 páginasChapter 3 Scan ConversionHimanshu GautamAinda não há avaliações
- Diagrams, Tensors and Geometric ReasoningDocumento30 páginasDiagrams, Tensors and Geometric ReasoningJestaly CastilloAinda não há avaliações
- Using Parametric EquationsDocumento5 páginasUsing Parametric EquationswolfretonmathsAinda não há avaliações
- C 1 Quadratic InterpolationDocumento18 páginasC 1 Quadratic InterpolationSukuje Je100% (1)
- IFEM Ch31Documento23 páginasIFEM Ch31vsbalintAinda não há avaliações
- Heat Equation in Partial DimensionsDocumento27 páginasHeat Equation in Partial DimensionsRameezz WaajidAinda não há avaliações
- Edge-Tenacity in Cycles and Complete GraphsDocumento8 páginasEdge-Tenacity in Cycles and Complete GraphsijfcstjournalAinda não há avaliações
- Major Assignment 1 2017Documento9 páginasMajor Assignment 1 2017Gurparkash Singh SohiAinda não há avaliações
- Curves: Lecture Notes of Computer Graphics Prepared by DR - Eng. Ziyad Tariq Al-Ta'iDocumento14 páginasCurves: Lecture Notes of Computer Graphics Prepared by DR - Eng. Ziyad Tariq Al-Ta'iDhahair A AbdullahAinda não há avaliações
- 4.integration Along Curves: N N I I I B A T (B A) T 0Documento12 páginas4.integration Along Curves: N N I I I B A T (B A) T 0Jenny ChoiAinda não há avaliações
- Bezier Curves and B-Splines, Blossoming: New York UniversityDocumento8 páginasBezier Curves and B-Splines, Blossoming: New York UniversityBalbirAinda não há avaliações
- Graphical Tensor Notation For Interpretability - LessWrongDocumento41 páginasGraphical Tensor Notation For Interpretability - LessWrongmirandowebsAinda não há avaliações
- Milenko Vic 2019Documento10 páginasMilenko Vic 2019SHAIK MOHAMMED SOHAIL SHAIK MOHAMMED SOHAILAinda não há avaliações
- Water Plane ComputationDocumento14 páginasWater Plane ComputationAchonk Gio VelenoAinda não há avaliações
- Curves, Lengths, Surfaces and AreasDocumento11 páginasCurves, Lengths, Surfaces and AreasstriaukasAinda não há avaliações
- Interactive Water SurfacesDocumento10 páginasInteractive Water SurfacesWu XianchunAinda não há avaliações
- Limitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultDocumento21 páginasLimitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultPriyanka GuptaAinda não há avaliações
- Computer Graphics AssignmentDocumento31 páginasComputer Graphics Assignmentvajahat07Ainda não há avaliações
- Numerical Quadratures For Singular and Hypersingular Integrals in Boundary Element MethodsDocumento10 páginasNumerical Quadratures For Singular and Hypersingular Integrals in Boundary Element MethodsFab MorlandoAinda não há avaliações
- Applications of The Wavelet Transform in Image Processing: 1 PrelimiariesDocumento16 páginasApplications of The Wavelet Transform in Image Processing: 1 PrelimiariesDundi NathAinda não há avaliações
- Lesson 2: The Trigonometric Functions by Thomas E. PriceDocumento38 páginasLesson 2: The Trigonometric Functions by Thomas E. PriceVed Prakash PantAinda não há avaliações
- Unified Matrix Polynomial Approach For OperationalDocumento14 páginasUnified Matrix Polynomial Approach For OperationalGabriele BanciAinda não há avaliações
- Beam Deflections: Structural EngineerDocumento17 páginasBeam Deflections: Structural EngineerroselleAinda não há avaliações
- Image Compression Using Curvelet TransformDocumento21 páginasImage Compression Using Curvelet Transformramnag4Ainda não há avaliações
- Bresenham Line Algorithm: Efficient Pixel-Perfect Line Rendering for Computer VisionNo EverandBresenham Line Algorithm: Efficient Pixel-Perfect Line Rendering for Computer VisionAinda não há avaliações
- Introduction To Indical NotationDocumento8 páginasIntroduction To Indical NotationKtk ZadAinda não há avaliações
- A Simple Displacement Control Technique For Pushover AnalysisDocumento16 páginasA Simple Displacement Control Technique For Pushover AnalysisKtk Zad100% (1)
- Numerical Analysis in Coastal EngDocumento11 páginasNumerical Analysis in Coastal EngKtk ZadAinda não há avaliações
- Chapter 7 Line Models 1Documento8 páginasChapter 7 Line Models 1Ktk ZadAinda não há avaliações
- Offshore Wind Energy in Europe - A Review of The State-of-the-ArtDocumento18 páginasOffshore Wind Energy in Europe - A Review of The State-of-the-ArtKtk ZadAinda não há avaliações
- Understanding Convergence and Stability of The Newton-Raphson MethodDocumento12 páginasUnderstanding Convergence and Stability of The Newton-Raphson MethodKtk ZadAinda não há avaliações
- Stress Strain ModelDocumento3 páginasStress Strain ModelKtk ZadAinda não há avaliações
- " - Si, - P-Z: Convergence Criteria For Iterative ProcessesDocumento2 páginas" - Si, - P-Z: Convergence Criteria For Iterative ProcessesKtk ZadAinda não há avaliações
- AIM:Write A Program To Convert A Decimal Number Into Binary EqualentDocumento27 páginasAIM:Write A Program To Convert A Decimal Number Into Binary EqualentAkashAinda não há avaliações
- Computer EthicsDocumento24 páginasComputer EthicsNugraha PangestuAinda não há avaliações
- Assignment EKC 245 PDFDocumento8 páginasAssignment EKC 245 PDFLyana SabrinaAinda não há avaliações
- IFEM Ch01Documento19 páginasIFEM Ch01Sahir AbasAinda não há avaliações
- C Programming Interview Questions and AnswersDocumento58 páginasC Programming Interview Questions and AnswersnishaAinda não há avaliações
- Discriminative Generative: R Follow ADocumento18 páginasDiscriminative Generative: R Follow AChrsan Ram100% (1)
- NS FreefemDocumento49 páginasNS FreefemTheTruc NguyenAinda não há avaliações
- 2D1371 Automata TheoryDocumento4 páginas2D1371 Automata Theoryciuciu.denis.2023Ainda não há avaliações
- Regression Analysis - VCE Further MathematicsDocumento5 páginasRegression Analysis - VCE Further MathematicsPAinda não há avaliações
- Cbjemass08 PDFDocumento10 páginasCbjemass08 PDFgirishvenggAinda não há avaliações
- Puremath30 06 07bull Archive PDFDocumento107 páginasPuremath30 06 07bull Archive PDFAshley MorganAinda não há avaliações
- A Comparative Study of Radial Basis Function Network With Different Basis Functions For Stock Trend PredictionDocumento6 páginasA Comparative Study of Radial Basis Function Network With Different Basis Functions For Stock Trend PredictionSyed Zain BukhariAinda não há avaliações
- DLL Grade 8Documento7 páginasDLL Grade 8Cherose LumboAinda não há avaliações
- 60 11th Maths Unit 11 Study Material English Medium PDFDocumento68 páginas60 11th Maths Unit 11 Study Material English Medium PDF21BPH121 Pradeep SAinda não há avaliações
- 3rd Quarter IPDocumento3 páginas3rd Quarter IPMark A. SolivaAinda não há avaliações
- Exam 2016, Questions Exam 2016, QuestionsDocumento6 páginasExam 2016, Questions Exam 2016, QuestionsRoy VeseyAinda não há avaliações
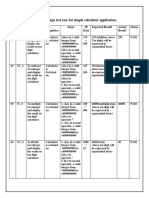
- Experiment No .3-Design Test Case For Simple Calculator ApplicationDocumento2 páginasExperiment No .3-Design Test Case For Simple Calculator ApplicationAbrar NadafAinda não há avaliações
- Functions, Limits and Continuity: X G F X G X FDocumento5 páginasFunctions, Limits and Continuity: X G F X G X FKenny KenAinda não há avaliações
- Qip Lecture On: Electrical & Electronics Circuit SimulationDocumento28 páginasQip Lecture On: Electrical & Electronics Circuit SimulationcskudarihalAinda não há avaliações
- 441 Lecture 9Documento24 páginas441 Lecture 9Lay Meng HortAinda não há avaliações
- Pyfmi TechDocumento45 páginasPyfmi TechCarlos JimenezAinda não há avaliações
- HW3 2023Documento3 páginasHW3 2023BlooD LOVERAinda não há avaliações
- EppDm4 01 01Documento22 páginasEppDm4 01 01Cit-deanUlsAinda não há avaliações
- Digital System Design LecturesDocumento132 páginasDigital System Design LecturesAnmar Hasan50% (2)