Você também pode gostar
- ControlEngineeringI PDFDocumento175 páginasControlEngineeringI PDFAlejandro RuedaAinda não há avaliações
- Ogunnaike Ray 1979Documento15 páginasOgunnaike Ray 1979John Walter Ticona QuispeAinda não há avaliações
- Nonlinear ProgrammingDocumento4 páginasNonlinear ProgrammingsolomonAinda não há avaliações
- Adaptive Generic Model Control: Dual Composition Control of DistillationDocumento11 páginasAdaptive Generic Model Control: Dual Composition Control of DistillationYlm PtanaAinda não há avaliações
- CSTR in SeriesDocumento6 páginasCSTR in SeriesMuqarrabin Hairul AnuarAinda não há avaliações
- Workshop For Flipped Class: Chapter 3 Part I Mathematical Modeling PrinciplesDocumento6 páginasWorkshop For Flipped Class: Chapter 3 Part I Mathematical Modeling PrinciplesAde Sari TrianaAinda não há avaliações
- Principles and Practice of Automatic Process ControlDocumento3 páginasPrinciples and Practice of Automatic Process ControlDaniel GarciaAinda não há avaliações
- Industrial MetabolismDocumento3 páginasIndustrial MetabolismtbeedleAinda não há avaliações
- Controllability analysis of exothermic reactorDocumento91 páginasControllability analysis of exothermic reactorCarmen de LeonAinda não há avaliações
- Energy Conservation in DistillationDocumento4 páginasEnergy Conservation in DistillationRajat WadhwaniAinda não há avaliações
- Exp-40 Part2Documento22 páginasExp-40 Part2Ahmet Samet ÖzdilekAinda não há avaliações
- Control of Multivariable ProcessesDocumento38 páginasControl of Multivariable Processessalvador2meAinda não há avaliações
- Michelsen (1990) - Method For Incorporating Excess Gibbs Energy Modified Eos.Documento12 páginasMichelsen (1990) - Method For Incorporating Excess Gibbs Energy Modified Eos.Ariel Hernández SepúlvedaAinda não há avaliações
- 8.4 Continuous Reactors: 8.4.1 Steady-State Chemostat (CHEMOSTA)Documento33 páginas8.4 Continuous Reactors: 8.4.1 Steady-State Chemostat (CHEMOSTA)Hana HamidAinda não há avaliações
- Experimental Process Technology Textbook Version 6Documento116 páginasExperimental Process Technology Textbook Version 6Sara AlrubaiiAinda não há avaliações
- Chapter 3 ConSol PPT by E.cusslerDocumento39 páginasChapter 3 ConSol PPT by E.cusslerheena_scottAinda não há avaliações
- Source Material PDFDocumento2 páginasSource Material PDFsantisal11Ainda não há avaliações
- Development of Solvay Clusters of Chemical Reactions PDFDocumento11 páginasDevelopment of Solvay Clusters of Chemical Reactions PDFJordan Lopez FernandezAinda não há avaliações
- 6D3 5D8Documento5 páginas6D3 5D8keniaAinda não há avaliações
- Wegstein Method Metodos NumericosDocumento15 páginasWegstein Method Metodos NumericosCesar GutierrezAinda não há avaliações
- Dynamic Mesh Handling in OpenFOAMDocumento34 páginasDynamic Mesh Handling in OpenFOAMAmr HitchAinda não há avaliações
- Ion Channels of Excitable Membranes: Bertil HilleDocumento11 páginasIon Channels of Excitable Membranes: Bertil HilleIgnacio Martinez Garcia100% (1)
- Cooking PotatoDocumento12 páginasCooking Potatonovi_wijaya_2Ainda não há avaliações
- 1.1 Questions: D N Y DD NN YYDocumento4 páginas1.1 Questions: D N Y DD NN YYEverton CollingAinda não há avaliações
- Assignment Thermal UiTMDocumento29 páginasAssignment Thermal UiTMiwe1234Ainda não há avaliações
- Hazop Study.xDocumento17 páginasHazop Study.xNur AishaAinda não há avaliações
- Report TemplateDocumento9 páginasReport Templatedmscott10Ainda não há avaliações
- App B Case Studies - Pagg 707 - 720Documento12 páginasApp B Case Studies - Pagg 707 - 720Daniel GarciaAinda não há avaliações
- ChE 441 Problem Set 2 SolutionsDocumento11 páginasChE 441 Problem Set 2 Solutionsไตเติ้ล สบม.Ainda não há avaliações
- Material Balance CalculationsDocumento2 páginasMaterial Balance CalculationsSergio Rugerio TorresAinda não há avaliações
- Transport Phenomena A Harry C 79355061Documento3 páginasTransport Phenomena A Harry C 79355061BrayanAinda não há avaliações
- Kuhn Tucker ConditionsDocumento15 páginasKuhn Tucker ConditionsBarathAinda não há avaliações
- MC CabeDocumento18 páginasMC CabeSata AjjamAinda não há avaliações
- PO SS2011 05.1 DynamicOptimization p11Documento11 páginasPO SS2011 05.1 DynamicOptimization p11Everton CollingAinda não há avaliações
- Conceptual Design Recycle Structure 2020Documento56 páginasConceptual Design Recycle Structure 2020Leencie SandeAinda não há avaliações
- Aplicacion de Sowtfare para I.Q.Documento34 páginasAplicacion de Sowtfare para I.Q.Gabriel MenchuAinda não há avaliações
- Integrated Management of Potato Starch WastesDocumento0 páginaIntegrated Management of Potato Starch WastesMihir DakwalaAinda não há avaliações
- NPTEL - Chemical Engineering - Process Control and InstrumentationDocumento1 páginaNPTEL - Chemical Engineering - Process Control and InstrumentationNirmal Kumar Pandey100% (1)
- Spreadsheet For Mass BalanceDocumento29 páginasSpreadsheet For Mass BalanceZakariya MohamedAinda não há avaliações
- Koretsky Thermodynamic Solutions For Fugacity, VLEDocumento11 páginasKoretsky Thermodynamic Solutions For Fugacity, VLEjgrav667Ainda não há avaliações
- Chapter 8 - StudentDocumento28 páginasChapter 8 - StudentJean RisquezAinda não há avaliações
- 7-Ode Ivp1Documento12 páginas7-Ode Ivp1rahulAinda não há avaliações
- Hysys - Multiple Reactions - StyreneDocumento10 páginasHysys - Multiple Reactions - Styrenejenny2409Ainda não há avaliações
- Lec5 PDFDocumento15 páginasLec5 PDFRaviAinda não há avaliações
- Membrane Reactor TechnologyDocumento140 páginasMembrane Reactor TechnologyMohamed Laíd SakhriAinda não há avaliações
- Ring Balance ManometerDocumento3 páginasRing Balance ManometerKamaljeet Singh0% (2)
- 4 Mass Transfer Coefficients PDFDocumento17 páginas4 Mass Transfer Coefficients PDFYee LingAinda não há avaliações
- Graphical solution of equilibrium and energy balance equationsDocumento24 páginasGraphical solution of equilibrium and energy balance equationsblackbeauty14100% (1)
- JCE (2007) pH-StatDocumento9 páginasJCE (2007) pH-Statmahoutsukai_monika100% (2)
- Predict Distillation Tray Efficiency: Reactions and SeparationsDocumento7 páginasPredict Distillation Tray Efficiency: Reactions and SeparationsJohn AnthoniAinda não há avaliações
- Isothermal ReactorDocumento58 páginasIsothermal ReactorRoxanna LevineAinda não há avaliações
- Lecture-3, Practical, 3Documento30 páginasLecture-3, Practical, 3Asasira IradAinda não há avaliações
- Chemical Engineering - 1999 Section A (75 Marks) ExamDocumento13 páginasChemical Engineering - 1999 Section A (75 Marks) ExamAnonymous 8pCXXsAinda não há avaliações
- Process Dynamics & Control ReportDocumento26 páginasProcess Dynamics & Control ReportDonna Joy MallariAinda não há avaliações
- A Hierarchical Decision Procedure For Process SynthesisDocumento10 páginasA Hierarchical Decision Procedure For Process SynthesisDaniela BeltranAinda não há avaliações
- Modeling and Simulation of CSTR For Manufacture of Propylene GlycolDocumento6 páginasModeling and Simulation of CSTR For Manufacture of Propylene Glycolantoojacome100% (1)
- Dynamic Programming in Chemical Engineering and Process Control by Sanford M RobertsNo EverandDynamic Programming in Chemical Engineering and Process Control by Sanford M RobertsAinda não há avaliações
- Practical Chemical Thermodynamics for GeoscientistsNo EverandPractical Chemical Thermodynamics for GeoscientistsAinda não há avaliações
- Cost Estimation TCI 2011Documento14 páginasCost Estimation TCI 2011Katrine PacamarraAinda não há avaliações
- BATBEP GuidelinesDocumento24 páginasBATBEP GuidelinesRexel ReedusAinda não há avaliações
- Company Profile PDFDocumento2 páginasCompany Profile PDFKatrine PacamarraAinda não há avaliações
- Generated by CamscannerDocumento3 páginasGenerated by CamscannerKatrine PacamarraAinda não há avaliações
- Problem Set in Physical Chemistry 2 PDFDocumento2 páginasProblem Set in Physical Chemistry 2 PDFKatrine PacamarraAinda não há avaliações
- Che 522safety in The Process Industry Course SyllabusDocumento2 páginasChe 522safety in The Process Industry Course SyllabusKatrine PacamarraAinda não há avaliações
- Final PaperDocumento151 páginasFinal PaperKatrine PacamarraAinda não há avaliações
- 15 Scl9 TopicsDocumento1 página15 Scl9 TopicsKatrine PacamarraAinda não há avaliações
- D 125.4875 X 0.95 T 64ºC: KG/HRDocumento2 páginasD 125.4875 X 0.95 T 64ºC: KG/HRKatrine PacamarraAinda não há avaliações
- Review of Expansion/Compression of GasesDocumento4 páginasReview of Expansion/Compression of GasesKatrine PacamarraAinda não há avaliações
- 15 Scl9 TopicsDocumento1 página15 Scl9 TopicsKatrine PacamarraAinda não há avaliações
- Company ProfileDocumento2 páginasCompany ProfileKatrine PacamarraAinda não há avaliações
- Activated CarbonDocumento2 páginasActivated CarbonKatrine PacamarraAinda não há avaliações
- 2103 Chapter 5 QuestionsDocumento4 páginas2103 Chapter 5 QuestionsKatrine PacamarraAinda não há avaliações
- Lab Pid Motor ControlDocumento17 páginasLab Pid Motor ControlacajahuaringaAinda não há avaliações
- What Causes Tsunamis? Earthquakes and Volcanic EruptionsDocumento2 páginasWhat Causes Tsunamis? Earthquakes and Volcanic Eruptionsmetal2eternityAinda não há avaliações
- ExamplesCh18 AccessibleDocumento34 páginasExamplesCh18 AccessibleSyed YousufuddinAinda não há avaliações
- Stability in Control SystemsDocumento20 páginasStability in Control Systemssamir100% (1)
- P. Joy: Class Test - 3Documento1 páginaP. Joy: Class Test - 3Uday Prakash SahuAinda não há avaliações
- Investigations On Transient Dynamic Response of Functionally Graded MaterialsDocumento5 páginasInvestigations On Transient Dynamic Response of Functionally Graded MaterialsInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- Company Profile 2019Documento4 páginasCompany Profile 2019iJeng RalluAinda não há avaliações
- Alternate Mekton Zeta Weapon CreationDocumento7 páginasAlternate Mekton Zeta Weapon CreationJavi BuenoAinda não há avaliações
- APlus DatasheetDocumento5 páginasAPlus DatasheetMuhamad RadzmanAinda não há avaliações
- 2 Mirrors and LensesDocumento84 páginas2 Mirrors and LensesAbdullah Munir NourozAinda não há avaliações
- Light Weight ConcreteDocumento15 páginasLight Weight ConcreteGia 2k17Ainda não há avaliações
- Math Test Item FSC Part 2Documento38 páginasMath Test Item FSC Part 2Fakhar AbbasAinda não há avaliações
- NatmDocumento10 páginasNatmCamyla clarineteAinda não há avaliações
- S. R. Davies - Spreadsheets in Structural Design 1995 # PDFDocumento201 páginasS. R. Davies - Spreadsheets in Structural Design 1995 # PDFNunoAinda não há avaliações
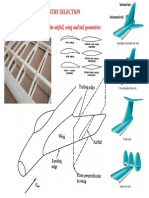
- Aircraft Design: Airfoil and Geometry SelectionDocumento94 páginasAircraft Design: Airfoil and Geometry SelectionYak100% (10)
- 421 Lab Report 3Documento4 páginas421 Lab Report 3Christian SawayaAinda não há avaliações
- Green Bean Plant Growth Sigmoid CurveDocumento2 páginasGreen Bean Plant Growth Sigmoid CurveRozalina Azian50% (4)
- Examen IsothermDocumento9 páginasExamen IsothermAlonso FloresAinda não há avaliações
- Phaser3428 Service PDFDocumento206 páginasPhaser3428 Service PDFRobert GreenAinda não há avaliações
- CFD Modeling and Control of an Industrial Steam Methane Reforming ReactorDocumento15 páginasCFD Modeling and Control of an Industrial Steam Methane Reforming Reactorcholila_tamzysiAinda não há avaliações
- 1 s2.0 0013794486900366 Main PDFDocumento9 páginas1 s2.0 0013794486900366 Main PDFEmanuel CarvalhoAinda não há avaliações
- How To Read A CapacitHow To Read A CapacitororDocumento5 páginasHow To Read A CapacitHow To Read A CapacitororSherifAinda não há avaliações
- Ashby Jones - Engineering Materials - Vol.1 - NeckingDocumento5 páginasAshby Jones - Engineering Materials - Vol.1 - NeckingpippaAinda não há avaliações
- Smart Gels: What Is A Smart Gel and How Do They Work?Documento19 páginasSmart Gels: What Is A Smart Gel and How Do They Work?Bharat GargAinda não há avaliações
- Topics Covered in This Lesson:: Revsurf RevolveDocumento6 páginasTopics Covered in This Lesson:: Revsurf RevolveMaynard DelacruzAinda não há avaliações
- Design Manual for Ethiopia's Low-Volume Rural RoadsDocumento45 páginasDesign Manual for Ethiopia's Low-Volume Rural RoadsMichael Kazi100% (1)
- A New Process of Gas-Assisted Injection Molding For Faster CoolingDocumento6 páginasA New Process of Gas-Assisted Injection Molding For Faster CoolingChandresh MotkaAinda não há avaliações
- NUREG 1123 Revision 2Documento446 páginasNUREG 1123 Revision 2Mike CantrellAinda não há avaliações
- Introduction To Lattice EnergyDocumento16 páginasIntroduction To Lattice EnergyRohan AhmedAinda não há avaliações
- Derivative of Product and QuotientDocumento18 páginasDerivative of Product and QuotientBretana joanAinda não há avaliações