Você também pode gostar
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachNo EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachAinda não há avaliações
- Introduction to the Theory of Linear Partial Differential EquationsNo EverandIntroduction to the Theory of Linear Partial Differential EquationsAinda não há avaliações
- Mth-382 Analytical Dynamics: MSC MathematicsDocumento51 páginasMth-382 Analytical Dynamics: MSC MathematicsediealiAinda não há avaliações
- Ket Bra OperatorsDocumento33 páginasKet Bra OperatorsZaheerIqbalAinda não há avaliações
- Solutions of Time-Independent Schrodinger EquationDocumento27 páginasSolutions of Time-Independent Schrodinger EquationGanesha BookAinda não há avaliações
- The Time-Independent Schrödinger Eqn - Quantum Physics Lecture 11Documento20 páginasThe Time-Independent Schrödinger Eqn - Quantum Physics Lecture 11korna2Ainda não há avaliações
- Krishnas - Calculus (Etc.) (Pdfnotes - Co)Documento533 páginasKrishnas - Calculus (Etc.) (Pdfnotes - Co)PrashikAinda não há avaliações
- qm1 PDFDocumento500 páginasqm1 PDFjorge barrosoAinda não há avaliações
- Differential Equations FormulaDocumento73 páginasDifferential Equations FormulaRaushanAinda não há avaliações
- Quantum Theory Uncertainty PrincipleDocumento36 páginasQuantum Theory Uncertainty PrincipleTran SonAinda não há avaliações
- Binil Sir LecturesDocumento122 páginasBinil Sir LecturesSagar RawalAinda não há avaliações
- Momentum Space OperatorDocumento12 páginasMomentum Space OperatorSri Vanaja S100% (1)
- Binil Sir Lectures Sec SemDocumento196 páginasBinil Sir Lectures Sec SemSagar RawalAinda não há avaliações
- Quantum Mechanics (Remaining)Documento7 páginasQuantum Mechanics (Remaining)vandv printsAinda não há avaliações
- 183 - PR 23 - Foucault Pendulum AnalysisDocumento2 páginas183 - PR 23 - Foucault Pendulum AnalysisBradley NartowtAinda não há avaliações
- Quantum Mechanics NotesDocumento21 páginasQuantum Mechanics NotesPujan MehtaAinda não há avaliações
- Math: 2107: Partial Differential Equations (Pdes)Documento25 páginasMath: 2107: Partial Differential Equations (Pdes)RafeulAinda não há avaliações
- Me6603 Fea - 2 MarksDocumento15 páginasMe6603 Fea - 2 MarksPrabha KaranAinda não há avaliações
- QM PostulatesDocumento11 páginasQM PostulatesMobashar AhmadAinda não há avaliações
- CrashUp 11PH07 Rotational Motion PDFDocumento39 páginasCrashUp 11PH07 Rotational Motion PDFAnuwak Mathur100% (1)
- Collision of Elastic BodiesDocumento10 páginasCollision of Elastic BodiesVinay HaridasAinda não há avaliações
- Mechanics NotesDocumento339 páginasMechanics NotesBATOOL M38Ainda não há avaliações
- Lecture#6 Complex NumbersDocumento11 páginasLecture#6 Complex NumbersburhanAinda não há avaliações
- Section 8.3: de Moivre's Theorem and ApplicationsDocumento6 páginasSection 8.3: de Moivre's Theorem and ApplicationsCarlo SantiagoAinda não há avaliações
- DIFFERENTIAL GEOMETRY NOTESDocumento125 páginasDIFFERENTIAL GEOMETRY NOTESKalaiAinda não há avaliações
- MechanicsDocumento45 páginasMechanicsshery171050% (2)
- Kirchhoffs LawDocumento125 páginasKirchhoffs Lawpaancute8982Ainda não há avaliações
- Sinusoidal Steady StateDocumento7 páginasSinusoidal Steady StateMalcolmAinda não há avaliações
- ENGINEERING MECHANICS TITLEDocumento46 páginasENGINEERING MECHANICS TITLEmuradAinda não há avaliações
- Mathematical Modeling of Control System Assignment NewDocumento8 páginasMathematical Modeling of Control System Assignment NewJawad SandhuAinda não há avaliações
- 1 Rotational Dynamics PDF PrintDocumento22 páginas1 Rotational Dynamics PDF PrintHarshal MankarAinda não há avaliações
- Lectures On Classical Mechanics-2Documento2 páginasLectures On Classical Mechanics-2Abhijit Kar Gupta100% (1)
- Unit 1 Mathematical Methods in PhysicsDocumento46 páginasUnit 1 Mathematical Methods in PhysicsDivyanshuVermaAinda não há avaliações
- Method of Images For MagnetostaticsDocumento18 páginasMethod of Images For MagnetostaticsWilliam Talmadge100% (1)
- Work, Energy and Momentum NotesDocumento4 páginasWork, Energy and Momentum NotesGeeta MAinda não há avaliações
- Mass EnergyDocumento5 páginasMass EnergySzarastroAinda não há avaliações
- Schrodinger EquationDocumento39 páginasSchrodinger EquationRADHIKAAinda não há avaliações
- The Action, The Lagrangian and Hamilton's PrincipleDocumento15 páginasThe Action, The Lagrangian and Hamilton's PrincipleShweta SridharAinda não há avaliações
- PH110-CHAPTER 4 DynamicsDocumento17 páginasPH110-CHAPTER 4 DynamicsNtape Knox SiwaleAinda não há avaliações
- B0943WLXL8Documento182 páginasB0943WLXL8xxxAinda não há avaliações
- Induction Motor Fundamentals PDFDocumento37 páginasInduction Motor Fundamentals PDFiorek_22Ainda não há avaliações
- Multivariable CalculusDocumento166 páginasMultivariable CalculusjackAinda não há avaliações
- Introduction - Forces, Equilibrium: Chapter HighlightsDocumento87 páginasIntroduction - Forces, Equilibrium: Chapter HighlightsJagannath MandalAinda não há avaliações
- Differential EquationDocumento27 páginasDifferential EquationRubina ArifAinda não há avaliações
- PHY 309 Quantum Physics IDocumento130 páginasPHY 309 Quantum Physics Ioduola ademola100% (1)
- Dynamics and Differential EquationsDocumento30 páginasDynamics and Differential EquationsHusseinali HusseinAinda não há avaliações
- Grand Canonical EnsembleDocumento10 páginasGrand Canonical EnsembleDanny WebbAinda não há avaliações
- Spin Operator Dirac ParticleDocumento20 páginasSpin Operator Dirac Particlebhuppi KumarAinda não há avaliações
- Solid State Physics (SSP)Documento88 páginasSolid State Physics (SSP)Narendra KhadkaAinda não há avaliações
- 225 Fall 2013 PDFDocumento518 páginas225 Fall 2013 PDFcombatps1Ainda não há avaliações
- Physics p1 Core PracticalsDocumento19 páginasPhysics p1 Core PracticalsgriggansAinda não há avaliações
- On The Physical Meaning of The Curl OperatorDocumento3 páginasOn The Physical Meaning of The Curl OperatorKrashnkant GuptaAinda não há avaliações
- Marsh Mathematica - ElectromagnetismDocumento70 páginasMarsh Mathematica - ElectromagnetismAlejandro GabrielAinda não há avaliações
- Rotating PendulumDocumento12 páginasRotating Pendulumjerome meccaAinda não há avaliações
- CBU Statics and Dynamics Course OutlineDocumento8 páginasCBU Statics and Dynamics Course OutlineNINEBO MWEWAAinda não há avaliações
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceNo EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissAinda não há avaliações
- Physics 1922 – 1941: Including Presentation Speeches and Laureates' BiographiesNo EverandPhysics 1922 – 1941: Including Presentation Speeches and Laureates' BiographiesAinda não há avaliações
- Newton's Laws of MotionDocumento8 páginasNewton's Laws of MotionRoda Gayle RañadaAinda não há avaliações
- Chapter 5Documento9 páginasChapter 5Keith Alfred GargarAinda não há avaliações
- Tutorial 12Documento15 páginasTutorial 12Sam ChanAinda não há avaliações
- Menu For Rigid ProblemsDocumento5 páginasMenu For Rigid ProblemsSam ChanAinda não há avaliações
- Shengwang Du: 2015, The Year of LightDocumento15 páginasShengwang Du: 2015, The Year of LightSam ChanAinda não há avaliações
- Shengwang Du: 2015, The Year of LightDocumento20 páginasShengwang Du: 2015, The Year of LightSam ChanAinda não há avaliações
- HEC Past PaperDocumento21 páginasHEC Past PaperTalha Aslam100% (1)
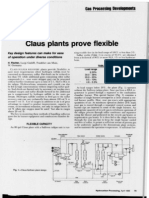
- Claus Plants Prove FlexibleDocumento3 páginasClaus Plants Prove Flexiblebakhtiari_afAinda não há avaliações
- G.6 Q.1 SCIENCE Lesson 2 Homogeneous MixtureDocumento35 páginasG.6 Q.1 SCIENCE Lesson 2 Homogeneous MixturemeguiAinda não há avaliações
- Atoms, Amount, Equations & Reactions (Acid-Base Redox) : Mark Scheme 1Documento14 páginasAtoms, Amount, Equations & Reactions (Acid-Base Redox) : Mark Scheme 1Rithika ParthasarathyAinda não há avaliações
- Annealing Process Explained in 40 CharactersDocumento8 páginasAnnealing Process Explained in 40 CharactersRohit SharmaAinda não há avaliações
- Fan Et Al. - Solids Mixing - Ind. and Eng. Chemistry (1970) Vol 62 NR 7Documento17 páginasFan Et Al. - Solids Mixing - Ind. and Eng. Chemistry (1970) Vol 62 NR 7BerndUmmeAinda não há avaliações
- Chemistry 312 Problem Set 6 KeyDocumento4 páginasChemistry 312 Problem Set 6 KeyryezhuAinda não há avaliações
- Diffusion Coefficients of Some Organic and Other Vapors in AirDocumento6 páginasDiffusion Coefficients of Some Organic and Other Vapors in AirSajan GangliAinda não há avaliações
- EMPC2015 - Wire Bonding of Au-Coated Ag Wire Bondwire Properties, Bondability andDocumento4 páginasEMPC2015 - Wire Bonding of Au-Coated Ag Wire Bondwire Properties, Bondability andChong Leong GanAinda não há avaliações
- Amines Amino Acids ProteinsDocumento13 páginasAmines Amino Acids ProteinsClifford Dwight RicanorAinda não há avaliações
- Chapter 7 - Relative Masses and Mole CalculationsDocumento9 páginasChapter 7 - Relative Masses and Mole CalculationsAdrawa NorwelAinda não há avaliações
- Newtons Laws With Good PicturesDocumento30 páginasNewtons Laws With Good PicturesMohammed RiyazuddinAinda não há avaliações
- Viscosity & Viscosity Modifiers: © 2019 Infineum International Limited. All Rights Reserved. 2017160Documento42 páginasViscosity & Viscosity Modifiers: © 2019 Infineum International Limited. All Rights Reserved. 2017160Jahmia Coralie100% (1)
- Jan 23 WCH12 SolvedDocumento28 páginasJan 23 WCH12 Solvedthe dsAinda não há avaliações
- Biology Lab Investigates Diffusion and Osmosis in CellsDocumento3 páginasBiology Lab Investigates Diffusion and Osmosis in CellsbriangkentAinda não há avaliações
- Síntesis de Alcohol VainillílicoDocumento6 páginasSíntesis de Alcohol VainillílicoYago L100% (1)
- Recommendations for Lubricating Oil SelectionDocumento7 páginasRecommendations for Lubricating Oil SelectionSergei KurpishAinda não há avaliações
- Astm D971Documento4 páginasAstm D971JORGE SANTANDERAinda não há avaliações
- Basf Masterglenium 118 TdsDocumento2 páginasBasf Masterglenium 118 TdsFatma IbrahimAinda não há avaliações
- B Som and FM Lab ManualDocumento101 páginasB Som and FM Lab ManualGANESH GOMATHIAinda não há avaliações
- AssignmentDocumento1 páginaAssignmentKen LaguiabAinda não há avaliações
- Enzymes .Documento6 páginasEnzymes .Nathan SsekamatteAinda não há avaliações
- NMR for sequence and structural isomerism analysisDocumento19 páginasNMR for sequence and structural isomerism analysisSyed Hashim Shah HashmiAinda não há avaliações
- Analysis of ToothpasteDocumento29 páginasAnalysis of Toothpasteanushka chadha100% (1)
- An Experimental Study On The Internal Corrosion of A Subsea Multiphase PipelineDocumento7 páginasAn Experimental Study On The Internal Corrosion of A Subsea Multiphase PipelineYogaAinda não há avaliações
- Pharmaceutical Compounding CalculationsDocumento6 páginasPharmaceutical Compounding Calculationsklr mnsdAinda não há avaliações
- Heat 1Documento36 páginasHeat 1ZainabAinda não há avaliações
- Work Power Energy JEE TestDocumento6 páginasWork Power Energy JEE TestAman RolandAinda não há avaliações
- The Elegant UniverseDocumento2 páginasThe Elegant UniverseNarasoma P. FeynmanAinda não há avaliações
- Numerical Modeling of A 90° Open-Channel Confluence Flow Using Openfoam CFDDocumento86 páginasNumerical Modeling of A 90° Open-Channel Confluence Flow Using Openfoam CFDVictor Lira0% (1)