Você também pode gostar
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Genetica CuantitativaDocumento120 páginasGenetica CuantitativaAlexis Josue Vallecillo GodoyAinda não há avaliações
- Index NumbersDocumento112 páginasIndex NumbersryanharunAinda não há avaliações
- Linear Regression Analysis for Predicting VariablesDocumento14 páginasLinear Regression Analysis for Predicting VariablesAnushka ShahAinda não há avaliações
- 1974 - Lieblein - Efficient Methods of Extreme-Value MethodologyDocumento36 páginas1974 - Lieblein - Efficient Methods of Extreme-Value MethodologyRobert VochescuAinda não há avaliações
- Important Probability and Statistics Questions Covering Random Variables, Distributions, Expectations, Hypothesis Testing & MoreDocumento2 páginasImportant Probability and Statistics Questions Covering Random Variables, Distributions, Expectations, Hypothesis Testing & MoreSai Santhosh100% (1)
- Forecasting Exchange RatesDocumento28 páginasForecasting Exchange RatesdeepapadhiAinda não há avaliações
- ML Models ConceptsDocumento32 páginasML Models ConceptsZarfa MasoodAinda não há avaliações
- Handout 4 - BUS 309Documento26 páginasHandout 4 - BUS 309ahmedeAinda não há avaliações
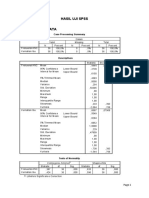
- Hasil Uji Spss A. Normalitas Data: Valid Missing Total CasesDocumento5 páginasHasil Uji Spss A. Normalitas Data: Valid Missing Total Casesakbartop1Ainda não há avaliações
- How To Choose The Correct Statistical TestDocumento51 páginasHow To Choose The Correct Statistical TestTheGimhan123Ainda não há avaliações
- Understand Cost BehaviorDocumento69 páginasUnderstand Cost BehaviorJessaAinda não há avaliações
- STPM Hypothesis Testing QuestionsDocumento2 páginasSTPM Hypothesis Testing QuestionsWilson LimAinda não há avaliações
- Econometrics II AssignmentDocumento3 páginasEconometrics II AssignmentHamral TemamAinda não há avaliações
- Chapter 8 StatisticsDocumento47 páginasChapter 8 StatisticsElena Writes100% (1)
- Stat and Prob - Q4 - Mod8 - Solving Problems Involving Test of Hypothesis On Population MeanDocumento22 páginasStat and Prob - Q4 - Mod8 - Solving Problems Involving Test of Hypothesis On Population MeanFrancine DaranciangAinda não há avaliações
- Formula Sheet - ANOVA, Chi-Square & RegressionDocumento1 páginaFormula Sheet - ANOVA, Chi-Square & RegressionAnonymous Xlpj86laAinda não há avaliações
- Time Series Forecasting TechniquesDocumento11 páginasTime Series Forecasting TechniquesBảo TrânAinda não há avaliações
- Inference One PopDocumento40 páginasInference One PopSAKHAWAT HOSSAIN KHAN MDAinda não há avaliações
- Statistical Inference For Two SamplesDocumento43 páginasStatistical Inference For Two SamplesaaaaAinda não há avaliações
- MC BreakdownDocumento5 páginasMC BreakdownThane SnymanAinda não há avaliações
- Final Exam StatDocumento2 páginasFinal Exam StatJulius Christopher GonzalesAinda não há avaliações
- Analisis Kurva Philips DI IndonesiaDocumento8 páginasAnalisis Kurva Philips DI IndonesiaPegy Melati SukmaAinda não há avaliações
- Quit Spreadsheet - Completed - Wharton - Business Analytics - Week 6Documento28 páginasQuit Spreadsheet - Completed - Wharton - Business Analytics - Week 6GgarivAinda não há avaliações
- 04.laboratory Exercise IVDocumento5 páginas04.laboratory Exercise IVDheerajGunwant80% (5)
- QBM FinalDocumento8 páginasQBM Finalsafura aliyevaAinda não há avaliações
- Statistical ToolsDocumento95 páginasStatistical ToolsMercy NunezAinda não há avaliações
- Anderson-Darling test for distribution adequacyDocumento5 páginasAnderson-Darling test for distribution adequacySimilAinda não há avaliações
- Nonparametric TestsDocumento4 páginasNonparametric TestsAllen MarcAinda não há avaliações
- Regression Analysis Using StatgraphicsDocumento58 páginasRegression Analysis Using StatgraphicsCUCUTA JUAN DIEGO HERNANDEZ LALINDEAinda não há avaliações
- Unit 2 Practice QuestionsDocumento5 páginasUnit 2 Practice QuestionsKristen JimenezAinda não há avaliações