Você também pode gostar
- Lesson 3 - A Person You AdmireDocumento6 páginasLesson 3 - A Person You AdmireBen English TVAinda não há avaliações
- A Is (Facts) (SVG) ,: AbstractDocumento9 páginasA Is (Facts) (SVG) ,: AbstractSherif M. DabourAinda não há avaliações
- New Multilevel Inverter Topology With Reduced Number of SwitchesDocumento6 páginasNew Multilevel Inverter Topology With Reduced Number of SwitchesVikram PrasadAinda não há avaliações
- Seven-Level Shunt Active Power Filter For High-Power Drive SystemsDocumento8 páginasSeven-Level Shunt Active Power Filter For High-Power Drive SystemsDivya KoundinyaAinda não há avaliações
- A New Hybrid Cascaded H-Bridge Multilevel Inverter - Performance AnalysisDocumento5 páginasA New Hybrid Cascaded H-Bridge Multilevel Inverter - Performance AnalysisGaurav BhandariAinda não há avaliações
- Simulation of Single Phase Multilevel Inverters With Simple Control Strategy Using MATLABDocumento9 páginasSimulation of Single Phase Multilevel Inverters With Simple Control Strategy Using MATLABFarman UllahAinda não há avaliações
- Comparison of Multicarrier PWM Strategies For Five-Level Z-Source Diode-Clamped Inverter For On-Grid Renewable Energies ApplicationsDocumento5 páginasComparison of Multicarrier PWM Strategies For Five-Level Z-Source Diode-Clamped Inverter For On-Grid Renewable Energies ApplicationsJeya RamAinda não há avaliações
- Presentation Paper On DGDocumento5 páginasPresentation Paper On DGAlok Bikash SadangiAinda não há avaliações
- Survey of CascadeDocumento10 páginasSurvey of Cascadesumiths32Ainda não há avaliações
- Trubitsyn High Efficiency ECCEDocumento8 páginasTrubitsyn High Efficiency ECCEprabu2991991Ainda não há avaliações
- Single-Phase Seven-Level Grid-Connected Inverter For Photovoltaic SystemDocumento9 páginasSingle-Phase Seven-Level Grid-Connected Inverter For Photovoltaic SystemDeepak Kumar NayakAinda não há avaliações
- A Novel Quasi-Z-Source Inverter Topology With Special Coupled Inductors For Input Current Ripples CancellationDocumento8 páginasA Novel Quasi-Z-Source Inverter Topology With Special Coupled Inductors For Input Current Ripples CancellationSherif M. DabourAinda não há avaliações
- A Generalized Multilevel Inverter TopologyDocumento8 páginasA Generalized Multilevel Inverter TopologyMinh NhậtAinda não há avaliações
- Performance Analysis of Asymmetrical Cascaded H-Bridge Nine Level Inverter With Photovoltaic ArraysDocumento4 páginasPerformance Analysis of Asymmetrical Cascaded H-Bridge Nine Level Inverter With Photovoltaic ArraysijsretAinda não há avaliações
- A Generalized Multilevel Inverter TopologyDocumento8 páginasA Generalized Multilevel Inverter TopologyHamid KhaleghiAinda não há avaliações
- Simulation and Experimental Results of 7-Level Inverter SystemDocumento8 páginasSimulation and Experimental Results of 7-Level Inverter Systembacuoc.nguyen356Ainda não há avaliações
- Kathirvel 2020 IOP Conf. Ser. Mater. Sci. Eng. 937 012038Documento12 páginasKathirvel 2020 IOP Conf. Ser. Mater. Sci. Eng. 937 012038Luis Angel Garcia ReyesAinda não há avaliações
- EEE - IJEEE - Multi-Level Inverter - Jyotshna DeviDocumento12 páginasEEE - IJEEE - Multi-Level Inverter - Jyotshna Deviiaset123Ainda não há avaliações
- Conv DC-DC Paper ENglishDocumento5 páginasConv DC-DC Paper ENglishpepe890305Ainda não há avaliações
- Neural Network Control of Grid-Connected Fuel Cell Plants For Enhancement of Power QualityDocumento7 páginasNeural Network Control of Grid-Connected Fuel Cell Plants For Enhancement of Power Qualityashikhmd4467Ainda não há avaliações
- Paper SaraDocumento9 páginasPaper SaraSara ElbadaouiAinda não há avaliações
- A Very High Frequency DC-DC Converter Based On A Class Pfi Resonant InverterDocumento10 páginasA Very High Frequency DC-DC Converter Based On A Class Pfi Resonant InvertererdemsecenAinda não há avaliações
- Modeling and Control of Multi-Terminal VSC HVDC Systems: Invited PaperDocumento8 páginasModeling and Control of Multi-Terminal VSC HVDC Systems: Invited Papermlkz_01Ainda não há avaliações
- Research On A Cascaded Multilevel Inverter by Employing Three-Phase TransformersDocumento10 páginasResearch On A Cascaded Multilevel Inverter by Employing Three-Phase TransformersManikanta SwamyAinda não há avaliações
- Hexagram Inverter For Medium-Voltage Six-Phase Variable-Speed DrivesDocumento9 páginasHexagram Inverter For Medium-Voltage Six-Phase Variable-Speed Drivesعبدالله نعمان آلزبيديAinda não há avaliações
- Analysis and Control of PV Cascaded H-Bridge Multilevel Inverter With Failed Cells and Changing Meteorological ConditionsDocumento13 páginasAnalysis and Control of PV Cascaded H-Bridge Multilevel Inverter With Failed Cells and Changing Meteorological ConditionsHamid HamzaAinda não há avaliações
- Simulation of Cascaded H-Bridge Multilevel Inverter Using OHSW PWM For The Elimination of HarmonicsDocumento14 páginasSimulation of Cascaded H-Bridge Multilevel Inverter Using OHSW PWM For The Elimination of HarmonicsBib SaAinda não há avaliações
- The International Conference On Renewable Energies: "ICRE-2010"Documento30 páginasThe International Conference On Renewable Energies: "ICRE-2010"M VetriselviAinda não há avaliações
- New H Bridge Cascaded TopologiesDocumento19 páginasNew H Bridge Cascaded Topologiesعبدالله نعمان آلزبيديAinda não há avaliações
- A Novel Single Phase Cascaded H-Bridge Inverter With Reduced Power Electronics SwitchesDocumento8 páginasA Novel Single Phase Cascaded H-Bridge Inverter With Reduced Power Electronics SwitchesHemanth KumarAinda não há avaliações
- Single-Phase Five-Level Inverter With Less Number of Power Elements For Grid ConnectionDocumento7 páginasSingle-Phase Five-Level Inverter With Less Number of Power Elements For Grid Connectionvinay kumarAinda não há avaliações
- Voltage-Source Active Power Filter Based On Multilevel Converter and Ultracapacitor DC LinkDocumento9 páginasVoltage-Source Active Power Filter Based On Multilevel Converter and Ultracapacitor DC LinkhdinhhienAinda não há avaliações
- European Journal of Electrical Engineering: Received: 10 March 2020 Accepted: 6 May 2020Documento9 páginasEuropean Journal of Electrical Engineering: Received: 10 March 2020 Accepted: 6 May 2020farid kerroucheAinda não há avaliações
- ARTICLE Onduleurs MultiniveauxDocumento14 páginasARTICLE Onduleurs MultiniveauxKhalid SalmiAinda não há avaliações
- 1995 & 1996 Paper On A Multilevel Voltage-Source Inverter With Separate DC Sources For Static VAr GenerationDocumento9 páginas1995 & 1996 Paper On A Multilevel Voltage-Source Inverter With Separate DC Sources For Static VAr GenerationfangzpengAinda não há avaliações
- Analysis, Modelling and Simulation of A Multiphase Interleaved Buck DC/DC Converter For PV ApplicationsDocumento7 páginasAnalysis, Modelling and Simulation of A Multiphase Interleaved Buck DC/DC Converter For PV ApplicationsInnovative Research PublicationsAinda não há avaliações
- 7level CHBDocumento9 páginas7level CHBGp NAYAGRAH ELECTRICALAinda não há avaliações
- 5 Level InverterDocumento6 páginas5 Level InverterRameshRtsAinda não há avaliações
- A Comparison Between The Buck, Boost and Buck-Boost InvertersDocumento6 páginasA Comparison Between The Buck, Boost and Buck-Boost InvertersIndra PratamaAinda não há avaliações
- Renewable Energy: Mohamed Abbes, Jamel Belhadj, Afef Ben Abdelghani BennaniDocumento10 páginasRenewable Energy: Mohamed Abbes, Jamel Belhadj, Afef Ben Abdelghani BennaniIssam IssammAinda não há avaliações
- 3 Phase Full Wave Bridge ConverterDocumento4 páginas3 Phase Full Wave Bridge Convertersubhasishpodder100% (1)
- Single Phase Asymmetrical Cascaded Multilevel Inverter Design For Induction MotorDocumento6 páginasSingle Phase Asymmetrical Cascaded Multilevel Inverter Design For Induction Motorfarid kerroucheAinda não há avaliações
- Lab Innovation Project DC DCDocumento15 páginasLab Innovation Project DC DCAyush MittalAinda não há avaliações
- Inverter Lifetime PhotovoltaicDocumento6 páginasInverter Lifetime Photovoltaicescuadrian9043Ainda não há avaliações
- Cascaded Theory - FullDocumento14 páginasCascaded Theory - FullTJPRC PublicationsAinda não há avaliações
- Integration of Distributed Generation Using Multilevel Invertor For Grid Connected Energy SystemsDocumento39 páginasIntegration of Distributed Generation Using Multilevel Invertor For Grid Connected Energy SystemsMaaz AhmadAinda não há avaliações
- International Journal of Engineering Research and DevelopmentDocumento7 páginasInternational Journal of Engineering Research and DevelopmentIJERDAinda não há avaliações
- Anzari 2014Documento6 páginasAnzari 2014Anshika MishraAinda não há avaliações
- Thermocouple in CarDocumento5 páginasThermocouple in CarJobin T JamesAinda não há avaliações
- Digital Simulation of DC Links and AC MachinesDocumento8 páginasDigital Simulation of DC Links and AC MachinesNarges FallahAinda não há avaliações
- Ece Vii Power Electronics (06ec73) SolutionDocumento77 páginasEce Vii Power Electronics (06ec73) SolutionVijay SaiAinda não há avaliações
- Implementation of 11 Level Cascaded Multilevel Inverter Using Level Shifting Pulse Width Modulation Technique With Different LoadsDocumento12 páginasImplementation of 11 Level Cascaded Multilevel Inverter Using Level Shifting Pulse Width Modulation Technique With Different LoadsInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- Soft Switched High Step-Up DC-DC Converter For Automotive ApplicationDocumento4 páginasSoft Switched High Step-Up DC-DC Converter For Automotive Applicationkarthi.r.tAinda não há avaliações
- Synthesized High-Frequency Thyristor For Dielectric Barrier Discharge Excimer LampsDocumento9 páginasSynthesized High-Frequency Thyristor For Dielectric Barrier Discharge Excimer Lampsdigital2000Ainda não há avaliações
- New Efficient Submodule For A Modular Multilevel Converter in Multiterminal HVDC NetworksDocumento21 páginasNew Efficient Submodule For A Modular Multilevel Converter in Multiterminal HVDC NetworksSudip MondalAinda não há avaliações
- A Self-Balanced Step-Up Multilevel Inverter Based On Switched-Capacitor StructureDocumento11 páginasA Self-Balanced Step-Up Multilevel Inverter Based On Switched-Capacitor StructurePrasanna Kumar EssampallyAinda não há avaliações
- Implementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRDocumento14 páginasImplementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRRamphani NunnaAinda não há avaliações
- An Analysis and Survey of Multilevel Inverters Topologies, Controls, and ApplicationsDocumento10 páginasAn Analysis and Survey of Multilevel Inverters Topologies, Controls, and ApplicationsDr-Ismayil CAinda não há avaliações
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNo EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNota: 5 de 5 estrelas5/5 (1)
- Programme Handbook 21-22 FinalDocumento27 páginasProgramme Handbook 21-22 Final4wqzcq7p9xAinda não há avaliações
- Senior Scientist Microbiologist in Boston MA Resume Adhar MannaDocumento2 páginasSenior Scientist Microbiologist in Boston MA Resume Adhar MannaAdharMannaAinda não há avaliações
- TASK 1-Krizzle Jane PaguelDocumento4 páginasTASK 1-Krizzle Jane PaguelKrizzle Jane PaguelAinda não há avaliações
- Queens Alumni Review 2012 - Spotlight: Bruce AlexanderDocumento2 páginasQueens Alumni Review 2012 - Spotlight: Bruce Alexanderalpha_abebeAinda não há avaliações
- Classification Epidemiological Studies PDFDocumento17 páginasClassification Epidemiological Studies PDFAnonymous goIn6wA3KAinda não há avaliações
- Machiavelli S Lessons For Public AdministrationDocumento15 páginasMachiavelli S Lessons For Public AdministrationMuzafar BhatAinda não há avaliações
- Monthly Meeting English - Filipino Club: TH RDDocumento3 páginasMonthly Meeting English - Filipino Club: TH RDMerben AlmioAinda não há avaliações
- Psycolinguistic - Ahmad Nur Yazid (14202241058)Documento3 páginasPsycolinguistic - Ahmad Nur Yazid (14202241058)Galih Rizal BasroniAinda não há avaliações
- Numl Lahore Campus Break Up of Fee (From 1St To 8Th Semester) Spring-Fall 2016Documento1 páginaNuml Lahore Campus Break Up of Fee (From 1St To 8Th Semester) Spring-Fall 2016sajeeAinda não há avaliações
- IEEE STD C37.14-1992 - IEEE Standard For Low-Voltage DC Power Circuit Breakers Used in EnclosuresDocumento46 páginasIEEE STD C37.14-1992 - IEEE Standard For Low-Voltage DC Power Circuit Breakers Used in EnclosuresnovitopoAinda não há avaliações
- Grade 9 Q1 Dance M2Documento11 páginasGrade 9 Q1 Dance M2Arjon Bungay FranciscoAinda não há avaliações
- CV Dr. RiaDocumento5 páginasCV Dr. RiaidaAinda não há avaliações
- Swach Bharat AbhiyanDocumento24 páginasSwach Bharat AbhiyanPartha Pratim Talukdar0% (1)
- Using Manipulatives To Teach RegroupingDocumento3 páginasUsing Manipulatives To Teach RegroupingGo Chun ShiAinda não há avaliações
- Human Anatomy and Physiology Course OutlineDocumento16 páginasHuman Anatomy and Physiology Course OutlineDEVORAH CARUZAinda não há avaliações
- WFA Competency LevelsDocumento5 páginasWFA Competency LevelsTroy Lyons DunowAinda não há avaliações
- 3-12-19 Formulating Meaningful ExpressionsDocumento2 páginas3-12-19 Formulating Meaningful ExpressionsMarianne Florendo GamillaAinda não há avaliações
- Why Women Wash DishesDocumento9 páginasWhy Women Wash Dishesmoodswingss100% (1)
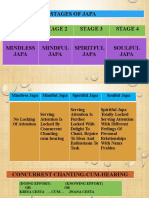
- SOULFUL JAPA - Bliss Unlimited by Japa YagnaDocumento28 páginasSOULFUL JAPA - Bliss Unlimited by Japa Yagnabalaganesh spk100% (1)
- Professional Development and Ict in EducDocumento131 páginasProfessional Development and Ict in EducHAN VLOGAinda não há avaliações
- Guru Tattva - Freedom VidyaDocumento4 páginasGuru Tattva - Freedom VidyaRavan SharmaAinda não há avaliações
- Teachers Load-Teacher ProfileDocumento2 páginasTeachers Load-Teacher ProfileKRISTEL JOY MANCERAAinda não há avaliações
- Regular ResumeDocumento3 páginasRegular Resumeapi-275908631Ainda não há avaliações
- Translation Services in Hong KongDocumento12 páginasTranslation Services in Hong KongAnjali ukeyAinda não há avaliações
- ELE Deliverable D2 18 Report On State of LT in 2030Documento56 páginasELE Deliverable D2 18 Report On State of LT in 2030Manuel BediaAinda não há avaliações
- MAED Lecture01 11Documento11 páginasMAED Lecture01 11chrisslyn antonioAinda não há avaliações
- Handout Sa Personal Development G 11Documento2 páginasHandout Sa Personal Development G 11Alecks Luis JacobeAinda não há avaliações
- Thoughts and Mood WorksheetsDocumento12 páginasThoughts and Mood Worksheetsjenfolz100% (5)
- Translating A Competency Standard Into A Competency-Based CurriculumDocumento11 páginasTranslating A Competency Standard Into A Competency-Based Curriculumxycor madlaAinda não há avaliações